具有存取点的输送系统和存取输送系统的存取点的方法与流程
具有存取点的输送系统和存取输送系统的存取点的方法
[0001]
本发明涉及一种自动化储存和取回系统,其包括一种用于储存储存集装箱的储存格栅和一种用于在储存格栅与输送系统的存取点之间输送所述储存集装箱的输送系统、以及一种操作输送运载工具进出存取点的方法。
[0002]
本发明还涉及一种输送系统的存取点,其中,该存取点被布置成使得对于运载储存集装箱的远程操作的输送运载工具而言具有往返于存取点的不止一个路径。
[0003]
背景技术:
和现有技术
[0004]
图1a和1c公开了具有框架结构100的典型的现有技术自动化储存和取回系统1。图1b和1d公开了分别操作图1a和1c中公开的系统1的现有技术的集装箱装卸运载工具101。
[0005]
框架结构100包括多个直立构件102和可选地支撑直立构件102的多个水平构件103。构件102、103通常可以由金属制成,例如由挤压铝型材制成。
[0006]
框架结构100限定了储存格栅104,该储存格栅包括以行布置的储存列105,其中,储存列105储存集装箱106(也称为料箱),其逐个堆垛起来以形成堆垛107。
[0007]
每个储存集装箱106通常可以保存多个产品项(未示出),并且根据应用,储存集装箱106内的产品项可以为相同的或者可以为不同的产品类型。
[0008]
储存格栅104防止堆垛107中的储存集装箱106的水平运动,并且引导储存集装箱106的垂直运动,但是在堆叠时通常不以其他方式支撑储存集装箱106。
[0009]
自动化储存和取回系统1包括以格栅图案布置在储存格栅104的顶部上的导轨系统108,在该导轨系统108上操作多个集装箱装卸运载工具200、300(如图1b和1d所示),以将储存集装箱106从储存列105中升高或将储存集装箱106降低到储存列105中,并且还将储存集装箱106运输到储存列105上方。在图1a和1c中用粗线标记构成格栅图案的格栅单元122之一的水平范围。
[0010]
每个格栅单元122具有通常在30至150cm的区间内的宽度和通常在50至200cm的区间内的长度。由于导轨110、111的水平范围,每个格栅开口115的宽度和长度通常比格栅单元122的宽度和长度小2至10cm。
[0011]
导轨系统108包括:第一组平行导轨110,被布置成引导集装箱装卸运载工具200、300在第一方向x上在框架结构100的顶部上的运动,以及第二组平行导轨111,被布置成垂直于第一组导轨110,以引导集装箱装卸运载工具200、300在垂直于第一方向x的第二方向y上的运动。通过这种方式,导轨系统108限定了格栅列,在该格栅列上方,集装箱装卸运载工具200、300可以在储存列105上方(即在平行于水平x-y平面的平面中)侧向地移动。
[0012]
每个现有技术的集装箱装卸运载工具200、300包括运载工具主体和八个轮的轮装置201、301,其中,第一组四个轮实现集装箱装卸运载工具200、300在x方向上的侧向移动,而第二组其余四个轮实现在y方向上的侧向运动。轮装置中的一组或两组轮可升高和降低,使得第一组轮和/或第二组轮可在任何时候与相应的一组导轨110、111接合。
[0013]
每个现有技术集装箱装卸运载工具200、300还包括用于垂直运输储存集装箱106的升降装置(未示出),例如其将储存集装箱106从储存列105中升高,以及将储存集装箱106降低到储存列105中。升降装置包括一个或多个抓握/接合装置(未示出),其适于接合储存
集装箱106,并且该抓握/接合装置可从运载工具201、301下降,使得抓握/接合装置相对于运载工具201、301的位置可以在与第一方向x和第二方向y正交的第三方向z上调节。
[0014]
常规地,并且也出于本申请的目的,z=1标识格栅104的最上层,即,紧挨在导轨系统108下方的层,z=2为导轨系统108下方的第二层,z=3为第三层,等等。在图1a和1c中公开的示例性现有技术格栅104中,z=8标识格栅104的最底层。因此,作为示例,并且使用图1a和1d所示的笛卡尔坐标系x、y、z,可以说在图1a中标识为106
’
的储存集装箱占据格栅位置或单元x=10、y=2、z=3。可以说集装箱装卸运载工具101在层z=0中行进,并且每个格栅列都可以通过其x和y坐标来标识。
[0015]
每个集装箱装卸运载工具200包括用于在导轨系统108上运输储存集装箱106时接收和存放储存集装箱106的储存室或空间(未示出)。储存空间可包括在运载工具主体内居中布置的空腔,例如如在wo2014/090684a1中所述,将其内容通过引用并入本文。
[0016]
替代地,集装箱装卸运载工具300可以具有悬臂结构,如在no317366中所述,将其内容也通过引用并入本文。
[0017]
集装箱装卸运载工具200可具有占地面积,即在x和y方向上的范围,其通常等于格栅单元122的侧向范围,即,格栅单元122在x和y方向上的范围,例如如在wo2015/193278a1中所述,将其内容通过引用并入本文。本文使用的术语“侧向”可以意指“水平”。
[0018]
替代地,集装箱装卸运载工具200可以具有大于格栅列105的侧向范围(由格栅列限定的侧向区域)的占地面积,例如如在wo2014/090684a1中公开的。
[0019]
如图2a所示,导轨系统108可以为单轨系统。替代地,导轨系统108可以为双轨系统,如图2b所示,从而允许具有大体上对应于由格栅列112限定的侧向区域的占地面积的集装箱装卸运载工具201沿着一行格栅列行进,即使另一个集装箱装卸运载工具200位于该行附近的格栅列上方。单轨系统和双轨系统,或者在单轨系统108中包括单轨和双轨装置的组合,在水平面p中形成格栅图案,该格栅图案包括多个矩形且均匀的格栅位置或格栅单元122,其中每个格栅单元122包括由第一组导轨110的一对导轨110a、110b和第二组导轨111的一对导轨111a、111b界定的格栅开口115。在图2b中,格栅单元122由虚线框表示。
[0020]
因此,导轨110a和110b形成限定在x方向上延伸的格栅单元的平行行的成对的导轨,并且导轨111a和111b形成限定在y方向上延伸的格栅单元的平行行的成对的导轨。
[0021]
如图2c所示,每个格栅单元122具有通常在30至150cm的区间内的宽度w
c
和通常在50至200cm的区间内的长度l
c
。每个格栅开口115的宽度w
o
和长度l
o
通常比格栅单元122的宽度w
c
和长度l
c
小2至10cm。
[0022]
在x方向和y方向上,相邻的格栅单元被布置为彼此接触,使得在它们之间没有空间。
[0023]
在储存格栅104中,大多数格栅列为储存列105,即格栅列105,其中储存集装箱106储存在堆垛107中。然而,格栅104通常具有至少一个格栅列,该格栅列不用于储存储存集装箱106,而是其包括这样一个位置,在该位置处,集装箱装卸运载工具200、300可以放下和/或拾取储存集装箱106,从而可以将它们运输到第二位置(未示出),在此可以从格栅104的外部存取储存集装箱106或将其移出或移入格栅104中。在本领域内,这样的位置通常被称为“端口”,并且端口位于其中的格栅列可以被称为“输送列”119、120。集装箱装卸运载工具的放下端口和拾取端口被称为“输送列的上端口”119、120。而将输送列的相对端称为“输送
列的下端口”。
[0024]
图1a和1c中的储存格栅104包括两个输送列119和120。第一输送列119可例如包括专用的放下端口,在此集装箱装卸运载工具200、300可放下储存集装箱106,以待通过输送列119运输并进一步运输到存取站或传送站,并且第二输送列120可包括专用的拾取端口,在此集装箱装卸运载工具200、300可拾取已经从存取站或传送站通过输送列120运输的储存集装箱106。第一和第二输送列的每个端口可以包括适于拾取和放下储存集装箱的端口。
[0025]
第二位置通常可以为将产品项从储存集装箱106中取出或定位在其中的拾取站或库存站。在拾取站或库存站中,通常不会从自动化储存和取回系统1中取出储存集装箱106,而是一旦存取它们就使其返回到储存格栅104中。为了将储存集装箱送出或送入储存格栅104,在输送列中还设置有下端口,例如,这样的下端口用于将储存集装箱106传送到另一储存设施(例如传送到另一储存格栅),直接传送到运输运载工具(例如火车或卡车),或传送到生产设施。
[0026]
为了监测和控制自动化储存和取回系统1(例如,监测和控制各个储存集装箱106在储存格栅104内的位置;每个储存集装箱106的内容物;以及集装箱装卸运载工具200、300的移动,以使期望的储存集装箱106可以在期望的时间输送至期望的位置而集装箱装卸运载工具200、300不会彼此碰撞),自动化储存和取回系统1包括控制系统(未示出),该控制系统通常为计算机化的,并且该控制系统通常包括用于跟踪储存集装箱106的数据库。
[0027]
可以使用包括传送带的传送带系统在输送列的下端口和存取站之间运输储存集装箱。
[0028]
如果输送列的下端口和存取站位于不同的高度,则传送带系统可以包括用于在端口和存取站之间垂直地运输储存集装箱的升降装置。
[0029]
传送带系统可以布置成在不同的格栅之间传送储存集装箱,例如如在wo2014/075937a1中所述,将其内容通过引用并入本文。
[0030]
此外,wo2016/198467a1(将其内容通过引用并入本文)公开了一种具有传送带(wo2016/198467a1中的图5a和5b)和框架安装导轨(wo2016/198467a1中的图6a和6b)的现有技术存取系统的示例,以用于在输送列和工作站之间运输储存集装箱,在工作站操作员可以存取储存集装箱。
[0031]
当要存取储存在图1a中公开的格栅104中的储存集装箱106时,指示集装箱装卸运载工具200、300中的一者从目标储存集装箱106在格栅104中的位置取回该目标储存集装箱并将其运输到或通过输送列119。此操作涉及将集装箱装卸运载工具200、300移动到目标储存集装箱106所在的储存列105上方的格栅位置,使用集装箱装卸运载工具的升降装置(未示出)从储存列105取回储存集装箱106,并且将储存集装箱106运输到输送列119。如果目标储存集装箱106位于堆垛107内的深处,即,一个或多个其他储存集装箱位于目标储存集装箱106上方,则该操作还涉及在从储存列105中提升目标储存集装箱106之前临时移动位于上方的储存集装箱。该步骤有时在本领域中被称为“挖掘”,其可以用随后用于将目标储存集装箱106运输到输送列的同一集装箱装卸运载工具200、300、或者用与一个或多个其他合作的集装箱装卸运载工具200、300来执行。替代地或另外地,自动化储存和取回系统1可以具有专门用于从储存列105临时取出储存集装箱106的任务的集装箱装卸运载工具200、300。一旦将目标储存集装箱106从储存列105中取出,则可以将临时取出的储存集装箱重新
放置在初始储存列105中。然而,取出的储存集装箱可以替代地重新定位到其他储存列105。
[0032]
当将储存集装箱106储存在格栅104中时,指示集装箱装卸运载工具200、300中的一者从输送列120拾取储存集装箱106并将其运输到在此储存该储存集装箱的储存列105上方的格栅位置。在取出位于储存列堆107内的目标位置处或目标位置上方的任何储存集装箱之后,集装箱装卸运载工具200、300将储存集装箱106定位在期望的位置。然后可以将取出的储存集装箱降低回到储存列105中或重新定位到其他储存列105中。
[0033]
与已知的自动化储存和取回系统1相关的问题在于,拾取端口和放下端口周围的区域可变得被指示放下或拾取储存集装箱106的集装箱装卸运载工具200、300拥堵。这可能严重阻碍自动化储存和取回系统1的操作。在小型系统中可以通过向格栅中添加输送列来缓解这种情况,因为这将允许将集装箱装卸运载工具200、300分配到更多数量的输送列的端口中,以避免拥堵。然而,如果添加了端口和列,则通常必须增加传送带系统基础设施。这需要空间,而空间可能不一定可用。另外,添加传送带系统基础设施成本很高。
[0034]
现有技术自动化储存和取回系统1的另一个问题在于,输送列的分开的放下端口119和拾取端口120需要集装箱装卸运载工具200、300在放下后移动至储存列105以取回新的储存集装箱106。同样地,当集装箱装卸运载工具200、300被送到拾取端口120以拾取储存集装箱时,它们必须没有储存集装箱106。这导致效率低下并导致端口周围的拥堵加剧,因为集装箱装卸运载工具200、300在没有储存集装箱106作为有效载荷的情况下在格栅上四处移动。另外,输送列119、120可占用格栅104上的空间,该空间可用于其他目的,诸如集装箱装卸运载工具200、300的移动。
[0035]
鉴于上述情况,期望提供一种自动化储存和取回系统以及一种用于操作该系统的方法,其解决或至少减轻与现有技术储存和取回系统的使用有关的一个或多个上述问题。
[0036]
本发明的目的是提供一种自动化储存和取回系统,其通过避免或至少减少在输送列周围的储存集装箱的拥堵而比现有技术系统更有效。
[0037]
另一个目的是提供一种自动化储存和取回系统,该系统增加了用于在导轨系统上操作的集装箱装卸运载工具的输送列的可用性。
[0038]
另一个目的是提供一种高效的自动化储存和取回系统,其易于安装,并且在完成安装后可以轻松地提高其输送能力。
[0039]
又一个目的是提供一种专用区域,在该区域中可以有效且容易地处理储存集装箱和保存在储存集装箱中的物品,并且可以以正确的顺序处理储存集装箱。
[0040]
本发明的概要
[0041]
在独立权利要求中阐述了本发明,并且从属权利要求描述了本发明的替代方案。
[0042]
在下文中,术语“远程操作的输送运载工具”被称为“输送运载工具”,并且术语“自动化储存和取回格栅”被称为“储存格栅”。术语“储存集装箱”在现有技术中也称为“料箱”。术语“拾取和库存站”也称为“存取站”或“存取站”。
[0043]
本发明涉及一种自动化储存和取回系统,该系统包括用于储存储存集装箱的储存格栅和用于在储存格栅的输送口和输送系统的存取点之间传输所述储存集装箱的输送系统,该存取点适于由机器人操作员或操作人员处理保存在储存集装箱中的物品。
[0044]
该输送系统包括:
[0045]-输送导轨系统,包括布置在水平面(p1)中并且在第一方向(x)上延伸的至少第一
组平行导轨、以及布置在水平面(p1)中并且在与第一方向(x)正交的第二方向(y)上延伸的至少第二组平行导轨,第一组导轨和第二组导轨共同限定了输送格栅单元的输送格栅,
[0046]-远程操作的输送运载工具,包括机动化的运载工具主体和设置在机动化的运载工具主体上方的用于承载储存集装箱中的一个储存集装箱的集装箱支架,并且其中,输送运载工具可在输送导轨系统的输送格栅上移动。
[0047]
其中,输送格栅在存取点处为远程操作的输送运载工具提供一个或多个输送格栅单元,并且在存取点的一个或多个输送格栅单元附近提供多个输送格栅单元,使得对于远程操作的输送运载工具而言具有经由多个输送格栅单元往返于存取点的不止一个路径,并且其中,远程操作的输送运载工具布置成将储存集装箱从储存格栅的输送口跨输送格栅运输到存取点,然后使其返回到输送口以储存在储存格栅中。
[0048]
用于储存储存集装箱的储存格栅包括以格栅图案布置在储存格栅的顶部上的储存格栅导轨系统,在该导轨系统上操作多个集装箱装卸运载工具,以将储存集装箱从储存列升高和将其降低到储存列中,并且还将储存集装箱运输到储存列上方。
[0049]
储存格栅具有至少一个格栅列,该格栅列不用于储存储存集装箱,而是其包括这样一个位置,在该位置处,集装箱装卸运载工具可以放下和/或拾取储存集装箱,以便可以将其运输到输送系统的存取站,在该存取站处可以存取储存集装箱。
[0050]
集装箱装卸运载工具的放下端口和拾取端口被称为输送列的“上端口”。而在输送列的相对端,通向输送系统的端口称为输送口。因此,输送口被定义为储存集装箱进入或离开储存格栅的端口(格栅单元)。
[0051]
输送导轨系统在储存格栅的输送口竖直下方的位置之间延伸至存取点,该存取点适于由机器人操作员或操作人员处理保存在储存集装箱中的物品。布置有远程操作的输送运载工具,以用于在输送口和存取点之间运输储存集装箱。
[0052]
为了在储存和取回格栅中获得用于储存集装箱的最大储存空间,可能有利的是将输送导轨系统布置成使其尽可能少地延伸至储存格栅中。这意味着储存和取回格栅可以包括从储存格栅的上层延伸至储存格栅的底部的多个储存列,因此由于整个储存列都可以用于储存,从而允许最大可能的储存容量。
[0053]
为了保持最大可能的储存容量,可以将输送导轨系统的延伸至储存格栅中的部分保持得尽可能小(较小范围)。因此,输送导轨系统和输送运载工具可占据储存和取回格栅的尽可能小的空间,该空间可用于储存储存集装箱。
[0054]
此外,输送导轨系统的多个输送运载工具格栅单元中的至少一个输送运载工具格栅单元,优选地每个输送运载工具格栅单元,可以布置在集装箱装卸运载工具导轨系统的集装箱装卸运载工具格栅单元正下方。输送导轨系统可以在储存格栅的框架结构内延伸。因此,第二位置将位于储存格栅的框架结构内部。
[0055]
输送导轨系统可以延伸至储存格栅的框架结构的外部,优选地延伸至存取点。当存取点位于储存格栅外部时,它们不会占用格栅的储存容量。
[0056]
输送导轨系统可以包括位于储存格栅的框架结构内的第一导轨系统和位于储存格栅的框架结构外部的第二导轨系统,并且其中,第一和第二导轨系统连接成使得输送运载工具可以在所述导轨系统之间操作。
[0057]
存取点可以连接至第二导轨系统。
[0058]
存取点可以包括输送格栅系统的一个单个格栅单元,或者存取点可以包括两个或更多个输送格栅单元。输送运载工具操作为使得当该输送运载工具位于存取点时,其允许操作人员和/或机器人操作员存取储存集装箱的内容物。
[0059]
根据本发明,输送运载工具具有经由多个输送格栅单元往返于存取点的不止一个路径。这使操作员可以协调输送运载工具可以进入或离开存取点的顺序。
[0060]
在实施例中,输送运载工具可以在第一端处进入存取点并且在第二端处离开存取点,使得储存集装箱可以一个接一个地连续进入存取点。
[0061]
存取点包括在存取点处用于输送运载工具的一个或多个输送格栅单元。输送格栅进一步提供与存取点的一个或多个输送格栅单元相邻的多个输送格栅单元,使得具有往返于存取点的不止一个路径。例如;存取点的每个格栅单元可以包括用于输送运载工具的四个入口或出口;在x方向上两个,在y方向上两个。由于操作人员或机器人操作员需要在一侧紧邻存取点站立,以便于存取储存的物品,因此,存取点例如包括三个入口或出口是优选的;在x方向上两个,在y方向上一个。因此,在该实施例中,输送运载工具可以在y方向上以及x方向上的两端从上方进入或离开存取点。这意味着,输送运载工具具有往返于存取点的至少三个路径,从而允许一个输送运载工具以到达存取站的顺序经过另一输送运载工具。
[0062]
可以将存取点定义为可以存取和/或处理储存集装箱的预定位置。术语“储存集装箱的处理”可以包括向集装箱存放物品/从集装箱中拾取物品,以及向储存格栅引入集装箱/从储存格栅移出集装箱。存取点可以为允许从储存格栅外部的位置存取储存集装箱的任何预定位置。
[0063]
该存取点可以位于集装箱存取站中,该集装箱存取站被布置为将操作人员与输送导轨系统和输送运载工具分开。
[0064]
输送格栅可以延伸至集装箱存取站或延伸到集装箱存取站中。输送格栅在存取点处为远程操作的输送运载工具提供一个或多个输送格栅单元,并且在存取点的输送格栅单元附近提供多个输送格栅单元,使得对于远程操作的输送运载工具而言具有经由多个输送格栅单元往返于存取点的不止一个路径。远程操作的输送运载工具被布置成将储存集装箱从储存格栅的输送口跨输送格栅运输到集装箱存取站的存取点并使其返回到输送口以储存在储存格栅内。
[0065]
集装箱存取站可以包括用于保护操作人员免受输送系统(导轨和输送运载工具)的部件影响并允许容易地处理储存集装箱及其内容物的装置。所述装置可以为壁或柜中的任一者。
[0066]
集装箱存取站可以包括壁,并且存取点可以为与输送格栅的一个或多个输送格栅单元相对应的区域,该输送格栅单元在这样的位置中布置在该壁的输送格栅一侧上,在该位置,由远程操作的输送运载工具运载的储存集装箱中的物品可由越过该壁的机器人或操作人员够到。
[0067]
在各方面中,集装箱存取站可以为具有侧壁和顶板的柜,其被布置成限定柜的内部容积。内部容积包括开口端,使得输送导轨系统延伸至该柜的所述内部容积中。更具体地,输送格栅系统的至少一个输送格栅单元延伸至柜的内部空间中。
[0068]
在一个实施例中,集装箱存取站包括柜,该柜包括设置在存取点上方的开口,并且其中,保存在储存集装箱中的物品通过所述开口在存取点可存取。开口可以设置在柜的顶
板中,使得从上方可存取保存在储存集装箱中的物品。
[0069]
输送运载工具可以操作成使得其集装箱支架和储存集装箱在位于存取位置时处于倾斜位置。在储存集装箱的倾斜位置中,除了更容易存取内容物和为操作人员提供更好的工作位置之外,还提供了增加的储存集装箱的内容物的可见性。最后旨在减少操作人员背部和膝盖上的压力。
[0070]
在实施例中,输送导轨系统提供了输送格栅,该输送格栅包括延伸至集装箱存取站或延伸到集装箱存取站中的三行或更多相邻行输送格栅单元。
[0071]
例如,集装箱存取站可以包括覆盖至少三个格栅单元的柜;一个左侧格栅单元,一个中间格栅单元和一个右侧格栅单元。其中,存取点可以位于中间格栅单元处,并且输送运载工具可以操作成使得它们在左侧格栅单元处进入柜中,移动到中间格栅单元,在此输送运载工具停下来,使得其储存集装箱可以由机器人或操作人员中的至少一者存取,然后在其离开柜之前进一步移动至右侧格栅单元。
[0072]
集装箱存取站可以设置有诸如开关、按钮或杠杆之类的启动装置,以用于已经在中间格栅单元位置处存取储存集装箱之后重新启动输送运载工具。在操作中,机器人或操作人员中的至少一者可以存取位于存取点处的储存集装箱的内容物。在已经存取了储存集装箱之后,机器人或操作人员中的至少一者可以推动启动装置,使得输送运载工具向前移动,从而允许另一个输送运载工具进入存取点。
[0073]
在实施例中,集装箱存取站可以设置成与储存格栅相邻或与储存格栅分离,其中在储存格栅的输送口和集装箱存取站之间布置有输送导轨系统。因此,储存集装箱可以在所述输送口和集装箱存取站之间在输送导轨系统上运输。
[0074]
远程操作的输送运载工具适于可在输送导轨系统上移动。此外,输送导轨系统可以为单轨系统或双轨系统。输送导轨系统定义了格栅图案,输送运载工具可以在该格栅图案上侧向移动。
[0075]
在实施例中,输送系统可受益于为导轨系统和储存格栅的集装箱装卸运载工具提供的许多考虑因素。
[0076]
为了促进生产并确保低成本,优选的是使用已经设计和测试的部件。因此,认为有利的是,输送导轨系统的每个格栅单元的尺寸等于或类似于用于集装箱装卸运载工具的导轨系统的格栅单元的尺寸。
[0077]
更具体地,输送导轨系统的每个格栅单元可以具有通常在30至150cm的区间内的宽度和通常在50至200cm的区间内的长度。输送导轨系统的每个格栅开口的宽度和长度通常比格栅单元的宽度和长度小2至10cm。
[0078]
输送导轨系统的水平面p1被布置在储存格栅的导轨系统的水平面p下方。
[0079]
集装箱存取站可以位于地面层上,使得操作人员和/或机器人操作员可存取储存集装箱而无需平台等。因此,输送导轨系统可以布置在垂直支撑元件上,使得输送导轨系统的水平面(p1)可以位于地面层之上的任何优选的垂直层处。
[0080]
通常,输送导轨系统位于储存格栅的顶层之下的任何一层处。优选地,输送导轨系统位于储存格栅的输送口下方的一层处。
[0081]
输送口可以布置在储存格栅的夹层上,使得输送运载工具可以在设置在夹层下方的输送导轨上操作,以用于向输送口输送储存集装箱/从输送口接收储存集装箱。夹层实际
上为储存格栅的凸起的底部或地板,从而为输送运载工具工作的区域提供了“顶部”。因此,夹层适合于储存集装箱当位于输送运载工具上时的总高度以及输送导轨系统的高度。这意味着储存格栅框架的直立构件必须制成得短才能将其悬挂在夹层中。夹层可以由从输送列跨出的直立支撑柱支撑,以支撑夹层。直立支撑柱的高度限定了夹层的高度(输送导轨系统的导轨本身可以悬挂在仓库建筑物的地板上方)。
[0082]
此外,夹层在水平面中的范围至少部分取决于布置在储存格栅中的输送列的总数。因此,可以根据储存系统的整体尺寸和系统的期望效率来定制输送列的数量以及夹层在x和y方向上的尺寸(范围)。因此,采用输送列意味着储存格栅中储存空间的损失。然而,由于借助于根据本发明的输送系统避免了或至少减少了储存集装箱在输送列处的拥堵,所以优点是提高了自动化储存和取回系统中的储存集装箱的输送效率。
[0083]
本发明还涉及一种输送系统,该输送系统用于在输送系统的拾取/放下端口与适于由机器人操作员或操作人员处理保存在储存集装箱中的物品的存取点之间输送储存集装箱。
[0084]
该输送系统包括:
[0085]-输送导轨系统,包括:至少第一组平行导轨,布置在水平面(p1)中并且在第一方向(x)上延伸,以及至少第二组平行导轨,布置在水平面(p1)中并且在与第一方向(x)正交的第二方向(y)上延伸,第一组和第二组导轨共同限定了输送格栅单元的输送格栅,
[0086]-远程操作的输送运载工具,包括机动化的运载工具主体和设置在机动化的运载工具主体上方的用于承载储存集装箱的储存集装箱的集装箱支架,并且其中,该输送运载工具可在输送导轨系统的输送格栅上移动。
[0087]
其中,输送格栅在存取点处为远程操作的输送运载工具提供一个或多个输送格栅单元,并且在存取点的一个或多个输送格栅单元附近提供多个输送格栅单元,使得具有经由多个输送格栅单元往返于远程操作的输送运载工具的存取点的不止一个路径,并且其中,远程操作的输送运载工具布置成将储存集装箱从输送系统的拾取端口和/或放下端口在输送格栅上运输到存取点,然后使其返回到输送系统的拾取端口和/或放下端口。
[0088]
输送系统的拾取端口/放下端口构成一个输送格栅单元,其位于储存格栅的输送列下方,并且布置成使得当输送运载工具位于拾取端口/放下端口处时输送运载工具可以通过该输送列从储存格栅且在输送运载工具上接收储存集装箱。
[0089]
输送导轨系统可以包括至少一个传送区域,以用于当在储存格栅的输送口和集装箱存取站之间运输储存集装箱时,将其临时储存在输送运载工具上。该区域可以为输送运载工具辆在通往存取点的路线上可能排队的区域。传送区域可以构成用于在传送区域处输送运载工具的一个或多个输送格栅单元。传送区域可以位于集装箱存取站的内部或外部。
[0090]
本发明还涉及一种操作远程操作的输送运输工具进出输送导轨系统的存取点的方法,该存取点为输送导轨系统上的机器人或操作人员存取保存在已输送至存取点的储存集装箱中的物品的位置。
[0091]
该输送系统包括:
[0092]-输送导轨系统,包括:至少第一组平行导轨,布置在水平面(p1)中并且在第一方向(x)上延伸,以及至少第二组平行导轨,布置在水平面(p1)中并且在与第一方向(x)正交的第二方向(y)上延伸,第一组和第二组导轨共同限定了输送格栅单元的输送格栅,
[0093]-远程操作的输送运载工具,包括机动化的运载工具主体和设置在机动化的运载工具主体上方并适于承载储存集装箱的集装箱支架,并且其中,输送运载工具可在输送导轨系统的输送格栅上移动,
[0094]
其中,输送格栅在存取点处为远程操作的输送运载工具提供一个或多个输送格栅单元,以及在存取点的输送格栅单元附近提供多个输送格栅单元,使得具有经由多个输送格栅单元往返于远程操作的输送运载工具的存取点的不止一个路径。
[0095]
该方法包括以下步骤:
[0096]
a)操作输送运载工具以将其引导到与存取点的一个或多个输送格栅单元相邻的多个输送格栅单元中的一个输送格栅单元,
[0097]
b)操作输送运载工具以从与存取点的一个或多个输送格栅单元相邻的多个输送格栅单元中的一个输送格栅单元进入存取点处的一个或多个格栅单元的输送格栅单元,
[0098]
c)允许机器人或操作人员在存取点存取保存在储存集装箱中的物品,
[0099]
d)操作输送运载工具以使存取点的一个或多个输送格栅单元退出到与存取点的一个或多个输送格栅单元相邻的多个输送格栅单元中的一个输送格栅单元。
[0100]
存取点可以设置在集装箱存取站中,该集装箱存取站布置成用于将机器人或操作人员与输送导轨系统和远程操作的输送运载工具分离。因此,输送格栅延伸至集装箱存取站或延伸至集装箱存取站中。
[0101]
附图的简述
[0102]
随附附图以促进对本发明的理解。
[0103]
图1和2为现有技术自动化储存和取回系统的透视图,其中图1a和图2a示出了整个系统,以及图1b和图2b示出了可操作的现有技术集装箱装卸运载工具的系统的示例。
[0104]
图3a-c为根据本发明的一个实施例的远程操作的输送运载工具的侧视图。
[0105]
图4a-b为根据本发明的一个实施例的远程操作的输送运载工具的透视图。
[0106]
图5a-b为从底面看到的图4a的远程操作的输送运载工具的透视图。
[0107]
图6a-b为根据本发明的一个实施例的另一自动化储存和取回格栅和输送系统的透视图。
[0108]
图7a-b为一组示例性集装箱存取站的透视图。
[0109]
图8a-b为包括集装箱存取站的另一示例性自动化储存和取回格栅和输送系统的透视图。
[0110]
图9a-b为包括集装箱存取站的另一示例性自动化储存和取回格栅和输送系统的透视图。
[0111]
图10为根据本发明的另一示例性自动化储存和取回格栅和输送系统的俯视图。
[0112]
本发明的详述
[0113]
在下文中,将参考附图更详细地讨论本发明的各实施例。然而,应当理解,附图并非旨在将本发明限制为附图中所描绘的主题。此外,即使仅相对于该系统描述了某些特征,很显然它们也对输送运载工具和相关方法有效,反之亦然。因此,仅关于输送运载工具描述的任何特征和/或相关方法对于该系统也是有效的。
[0114]
在下文中,将参考附图更详细地讨论本发明的各实施例。然而,应当理解,附图并非旨在将本发明限制为附图中所描绘的主题。此外,即使仅相对于该系统描述了某些特征,
很显然它们也对输送运载工具和相关方法有效,反之亦然。因此,仅关于输送运载工具描述的任何特征和/或相关方法对于该系统也是有效的。
[0115]
参考图1a-d,每个储存结构1的储存格栅104构成总共143个格栅列112的框架100,其中框架的宽度和长度分别对应于13个和11个格栅列112的宽度和长度。框架100的顶层为导轨系统108,在该导轨系统上操作多个集装箱装卸运载工具200、300。
[0116]
储存系统1的框架100根据上述的上述现有技术框架100构造,即,多个直立构件102和由直立构件102支撑的多个水平构件103,并且进一步地,水平构件103包括分别在x方向和y方向上跨储存列105的顶部布置的平行导轨110、111的导轨系统108。单个格栅单元122的水平区域,即沿着x和y方向,可以分别由相邻的导轨110和111之间的距离限定(也参见图3和4)。在图1a和1c中,这种格栅单元122在导轨系统108上由粗线标记。
[0117]
导轨系统108允许集装箱装卸运载工具200、300在不同的格栅位置之间水平移动,其中每个格栅位置与格栅单元122相关联。
[0118]
在图1a和1c中,储存格栅104被示为具有八个单元的高度。然而,应当理解,储存格栅104原则上可以具有任何大小。特别地,应当理解,储存格栅104可以比图1a和1c中公开的大小更宽和/或更长。例如,格栅104可以具有超过700x700格栅单元122的水平范围。而且,格栅104可以比图1a和1c中公开的更深。例如,储存格栅104可以深于十二个格栅单元。
[0119]
储存集装箱运载工具200、300可以为本领域中已知的任何类型,例如wo2014/090684a1、no317366或wo2015/193278a1中公开的任何一种自动化集装箱装卸运载工具。
[0120]
如图2a所示,导轨系统108可以为单轨系统。如图2b所示,替代地,导轨系统108可以为双轨系统。在本说明书的背景技术和现有技术中公开了单轨和双轨系统的细节。
[0121]
图3a-c示出了根据本发明的远程操作的输送运载工具30的实施例,下文称为输送运载工具30。
[0122]
输送运载工具30被配置用于在自动化储存和取回格栅104(参见图7a和b)和存取点161之间运输储存集装箱106(未示出),该自动化储存和取回格栅配置为储存储存集装箱106的多个堆垛107,以下称为储存格栅104,该存取点设置在集装箱存取站160中,以用于由机器人操作员和操作人员中的至少一者来处理储存集装箱106。
[0123]
所述输送运载工具30包括:运载工具主体31、连接至运载工具主体31的辊装置32a、32b、用于在水平面(p)上驱动辊装置32a、32b的辊装置马达、以及与辊装置马达33连接的电源43。电源43应向辊装置马达(未示出)提供足够的动力,以在例如从储存格栅104到存取点65的设定路径上推进辊装置32a、32b。
[0124]
输送运载工具30可进一步包括安装在运载工具主体31上方的集装箱支架35。集装箱支架35应构造成将储存集装箱106接收到集装箱支架35上或集装箱支架内,从而防止储存集装箱106沿水平面(p1)滑动。
[0125]
集装箱支架35可以包括从下方支撑储存集装箱106的集装箱支撑装置。
[0126]
在图3a-b中,以具有底部/基部和侧壁的储存集装箱接收室的形式公开了集装箱支架35。在该示例性构造中,接收室的容积使得其可以接收并容纳储存集装箱的整个水平范围以及储存集装箱的垂直范围的至少一部分。图3a-c示出了容纳整个储存集装箱106的集装箱支架35的示例,并且图4a-b示出了容纳一部分储存集装箱106的替代集装箱支架35。
[0127]
在3a-c中公开的集装箱支架35的特定构造允许输送运载工具30运输具有不同高
度的储存集装箱106。
[0128]
需指出,集装箱支架35内的接收室的尺寸可以容易地适于在一次操作中接收和支撑多个储存集装箱106。
[0129]
图3b和3c示出了输送运载工具30的特定构造,其中,集装箱支架35可以相对于运载工具主体31和水平面(p1)设置在倾斜位置。集装箱支架35可以借助于专用的移位装置倾斜。倾斜可以围绕定向在输送运载工具30的主要运动方向上的枢转轴线。如果输送运载工具30在垂直导轨上移动(见下文),则这些主要方向将在x方向或y方向上。
[0130]
移位装置的倾斜例如可以通过联接至运载工具主体31和集装箱支架35的升降臂45来获得。另外,升降臂45可以由专用的倾斜马达42或辊装置马达或两者驱动。
[0131]
移位装置在图3b和3c中示出为具有l形的升降臂45,该升降臂的一侧连接至运载工具主体31,而另一侧连接至固定于集装箱支架35的结构。臂45的另一端也可以直接连接至集装箱支架35。
[0132]
倾斜马达42被视为完全布置在运载工具主体31内部,并且直接或间接连接至升降臂45,以使升降臂45在集装箱支架35相对于水平面(p)不倾斜的下部位置和集装箱支架35相对于水平面(p)倾斜的上部位置之间移动。需指出,水平面(p)可以定义为由辊装置32的轮32a、32b的特定构造建立的平面。
[0133]
图3a-c和4a-c示出了输送运载工具30的透视图。在该示例性构造中,辊装置32包括:
[0134]-第一组轮32a,布置在穿过运载工具主体31的垂直中心平面的相对部分处,以使输送运载工具30沿第一方向,例如沿输送导轨系统上的x方向移动;以及
[0135]-第二组轮32b,布置在穿过运载工具主体31的垂直中心平面的相对部分处,以使输送运载工具30沿第二方向,例如沿垂直于第一方向x的输送导轨系统上的y方向移动。
[0136]
图4c示出了远程操作的输送运载工具30的又一示例性构造。在这种构造中,集装箱支架35包括基板、布置在基板上的传送带和从基板向上突出的两个侧壁。辊装置32和运载工具主体31与以上结合图3-5所述的辊装置32和运载工具主体31相同或相似。
[0137]
传送带可以尤其通过多个平行定向的辊36来设置,该辊具有垂直于两个侧壁的共同纵向方向。以此方式,辊36允许一个或多个储存集装箱106在被侧壁引导的同时移入或移出集装箱支架35。传送带可以连接至允许一个或多个辊旋转的传送带马达。
[0138]
图5a和b从下方示出了输送运载工具30。如在图5a中清楚地看到的,输送运载工具30的运载工具主体31包括内部部件接收凹部或隔室,以用于容纳部件,诸如一个或多个专用倾斜马达42、一个或多个轨道改变马达41、诸如电池43的一个或多个动力储存源以及诸如cpu和/或电源pcb 44的一个或多个控制卡。因此,上述部件位于运载工具主体31内,集装箱支架35的下方。
[0139]
集装箱支架35的储存集装箱接收室在该特定构造中具有带垂直侧壁的矩形底板或基板。垂直侧壁可以具有任何高度,只要它们确保储存集装箱106被限制为沿集装箱支架的基板移动。
[0140]
例如,接收室35的尺寸可以对应于储存集装箱106的尺寸,从而完全容纳储存集装箱106。
[0141]
在集装箱支架35被配置为支撑多个储存集装箱106的情况下,垂直壁的尺寸在一
个示例中可以为每个储存集装箱106的高度,而基板的尺寸可以为所有储存集装箱106相对于它们的外侧向末端测量的横截面面积的总和。
[0142]
图5b示出了如上所述的具有运载工具主体31和八个轮32a、32b的辊装置32的输送运载工具30。对于图3-5中所示的输送运载工具,第一组四个轮32a使得输送运载工具30能够在第一方向上侧向或水平运动,而第二组其余四个轮32b使得能够在可以垂直于第一方向的第二方向上侧向或水平运动。
[0143]
如果在输送导轨系统50上使用,则应升高和降低辊装置32的一组或两组轮32a、32b,以使第一组轮32a和/或第二组轮32b可在任何时候与设置在输送导轨系统50上的相应一组导轨接合。
[0144]
自动化储存和取回系统的透视图如图6-9所示。该系统包括储存格栅104和输送系统140,该输送系统包括输送导轨系统50、多个输送运载工具30和设置在集装箱存取站60中的存取点65。
[0145]
储存格栅104等于或类似于如上所述的现有技术储存格栅104,即,储存格栅104包括导轨系统108;储存集装箱106的多个堆垛107、用于升降和移动堆叠在堆垛107中的储存集装箱106的多个集装箱装卸运载工具300以及构造成从集装箱装卸运载工具300接收储存集装箱106的输送列119、120。
[0146]
导轨系统108包括布置在水平面(p)中并在第一方向(x)上延伸的第一组平行轨道110和布置在水平面(p)中并在与第一方向(x)正交的第二方向(y)上延伸的第二组平行轨道111。第一组轨道110和第二组轨道111在包括多个相邻格栅单元122的水平面(p)中形成格栅图案。每个格栅单元122显示由第一组导轨110的一对相邻导轨和第二组导轨111的一对相邻导轨限定的格栅开口。
[0147]
多个堆垛107布置在位于导轨系统108下方的储存列105中,其中,每个储存列105垂直位于格栅单元122下方。
[0148]
每个集装箱装卸运载工具200、300均配置为在储存柱105上方的导轨系统108上移动。
[0149]
输送系统140包括如上所述的一个或多个输送运载工具30,即,配置成接收和支撑储存集装箱106以在一个或多个输送列119、120和位于储存格栅104外部的一个或多个集装箱处理站160之间输送的输送运载工具30。集装箱处理站160可以位于适合于处理集装箱的任何预定位置。
[0150]
输送系统140可进一步包括位于一个或多个输送列119、120的输送口150下方的输送导轨系统50。
[0151]
如图6a-b所示,输送导轨系统50可以以与用于集装箱装卸运载工具200、300的导轨系统108相同或相似的方式构造。输送导轨50至少从一个或多个输送列119、120的输送口150延伸,并且延伸到至少一个集装箱存取站60中并且进一步延伸至存取点65,使得每个输送运载工具30可以移入至少一个集装箱存取站60中并且朝向集装箱存取站60的存取点65移动,在该存取点65处可以存取保存在储存集装箱106中的物品。
[0152]
集装箱存取站可以包括柜60,该柜包括壁和支撑在其上的顶盖。保存在存取点65处由输送运载工具30运载的储存集装箱106中的物品可通过顶盖中的开口63够到。
[0153]
柜60布置成与储存格栅104相邻,其中,输送导轨系统50从输送口150下方延伸并
延伸至柜60的内部容积或延伸到柜60的内部容积中。
[0154]
输送导轨系统可以为单轨系统或双轨系统、或两者的组合。
[0155]
输送导轨系统50可以包括:至少第一组平行导轨,布置在水平面(p1)中并且在第一方向(x)上延伸;以及至少第二组平行轨道,布置在水平面(p1)中并且在与第一方向(x)正交的第二方向(y)上延伸,第一组和第二组导轨共同限定了输送格栅单元52的输送格栅51。
[0156]
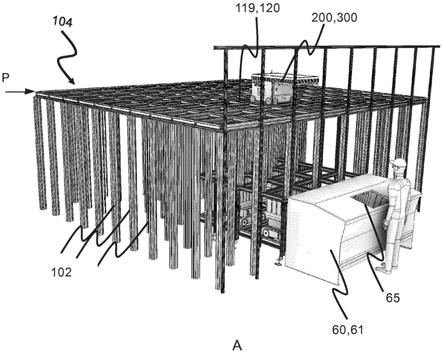
输送导轨系统50可以完全或部分地集成到储存格栅104中。图6a和图6b示出了部分地集成到储存格栅中的输送导轨系统50,其中输送导轨系统50的位于储存格栅外部的部分被柜61覆盖。柜61可以设置有位于柜61的内部容积中的六个格栅单元。输送格栅51在存取点65处为远程操作的输送运载工具30提供一个或多个输送格栅单元52,以及在存取点65的一个或多个输送格栅单元52附近提供多个输送格栅单元52,使得具有经由多个输送格栅单元52往返于远程操作的输送运载工具30的存取点65的不止一个路径。
[0157]
存取点65与集装箱存取站60中的专用位置有关,其中产品项从储存集装箱106中移出或定位在其中。
[0158]
柜可包括壁和支撑在其上的顶盖。保存在存取点65处由输送运载工具30运载的储存集装箱106中的物品可通过顶盖中的开口63够到。
[0159]
输送导轨系统50在垂直于输送口150下方的位置之间延伸至集装箱存取站60或延伸到集装箱存取站60中,并且远程操作的输送运载工具30布置成用于在输送口150和集装箱装卸站60的存取点65之间运输储存集装箱。
[0160]
图6b示出了没有储存格栅104的图6a的输送系统。
[0161]
集装箱存取站60可以位于如图6a和6b所示的地面楼层上,使得操作人员和/或机器人操作员可以在存取点65处存取储存集装箱106。
[0162]
输送口150可以布置在储存格栅104的夹层151上,使得输送运载工具可以在设置于夹层151下方的输送导轨50上操作,以用于向输送口150输送储存集装箱106/从输送口接收储存集装箱。因此,夹层155适于在储存集装箱106定位在输送运载工具30和输送导轨系统50上时的总高度。
[0163]
此外,夹层155在水平面中的范围取决于布置在储存格栅中的输送列的总数。因此,可以根据储存系统的尺寸和系统的期望效率来定制输送列119、120的数量以及夹层155在x和y方向上的范围。
[0164]
集装箱存取站160可以进一步定义为用于保护操作人员免受输送系统的部件(导轨和输送运载工具)的影响并且允许容易地处理储存集装箱106及其内容物的任何装置。换句话说,它在操作人员和输送系统的部件之间提供了屏障。
[0165]
为了确保有效的操作,可以认为输送导轨系统50具有覆盖在至少一个输送列119、120下方并且延伸至储存格栅104的外部的输送口150的水平范围。图7a和7b所示的本发明的构造允许多个输送运载工具30在输送导轨系统50上操作,同时避免在输送列150周围的储存集装箱的拥堵。
[0166]
图7和8示出了三个集装箱存取站60,每个集装箱存取站包括柜60,该柜包括壁和支撑在其上的顶盖,其中,保存在存取点65处由远程操作的输送运载工具30运载的储存集装箱106中的物品可通过顶盖上的开口63够到。
[0167]
顶盖中的开口63位于输送格栅单元52正上方,从而限定了存取点65。
[0168]
存取点65可以包括输送格栅50的一个单个格栅单元,或者存取点65可以包括两个或更多个输送格栅单元52。输送运载工具30操作为使得当该输送运载工具位于存取点65时,其允许操作人员和/或机器人操作员存取储存集装箱的内容物。
[0169]
如图8a-b所示,输送运载工具30具有经由多个输送格栅单元52往返于存取点65的不止一个路径。这使操作员可以协调输送运载工具辆30可以进入或离开存取点65的顺序。
[0170]
图8a和b中的输送运载工具30可以在第一端处进入存取点65并且在第二端处离开存取点65,使得储存集装箱106可以逐个连续进入和离开存取点65。
[0171]
为了增加操作人员在存取点65处存取储存集装箱106的可见性、易于操作性和更好的工作位置,输送运载工具30可以在倾斜的位置朝向操作人员操作集装箱。图8a和8b示出了在存取点65处处于倾斜位置的输送运载工具30的集装箱。
[0172]
图9a示出了与包括传送带的辅助输送系统结合的自动化储存和取回系统的透视图。传送带布置成用于在自动化储存和取回系统与另一储存设施、生产设施等之间运输货物。可以在集装箱存取站60处处理货物,以进一步运输到储存集装箱106中的储存格栅104,或它们可以从储存集装箱106收集,以运输到传送带上的其他设施。
[0173]
图9a和9b中的集装箱存取站60包括壁62,该壁用于将输送格栅51和输送运载工具30与操作人员分开。
[0174]
存取点65为在这样的位置布置在壁62的输送格栅51侧上的与输送格栅51的一个或多个输送格栅单元52相对应的区域,即,在该位置中,保存在由远程操作的输送运载工具30运载的储存集装箱106中的物品可由靠在壁62上的机器人或操作人员够到。
[0175]
在图9a和9b中,存取点可以包括多个单独的输送格栅单元52,从而允许操作人员在该存取点存取六个不同的储存集装箱。
[0176]
输送运载工具30可以操作为使得它们在存取站65处的优选位置处使集装箱支架35和储存集装箱106倾斜。
[0177]
图10以更大比例示出了图9a的实施例的俯视图。该储存系统包括两个储存格栅104,并且输送系统140的输送导轨系统50布置成使得其连接两个分开的储存格栅104。以此方式,可以在两个分开的储存格栅架104之间以及在两个储存格栅架104与集装箱存取站60之间运输储存集装箱106。
[0178]
附图标记:
[0179]
30
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
输送运载工具
[0180]
31
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
运载工具主体
[0181]
32
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
辊装置
[0182]
32a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一组轮
[0183]
32b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二组轮
[0184]
35
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
集装箱支架
[0185]
36
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
传送带的辊
[0186]
41
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
移位装置
[0187]
42
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
倾斜马达
[0188]
43
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
电源
[0189]
44
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
控制器
[0190]
45
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
升降臂
[0191]
50
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
输送导轨系统
[0192]
51
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
输送格栅
[0193]
52
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
输送格栅单元
[0194]
60
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
集装箱存取站
[0195]
61
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
柜
[0196]
62
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
壁
[0197]
63
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
柜的顶盖开口
[0198]
65
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
存取点
[0199]
p1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
输送导轨系统的水平面
[0200]
100
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
框架结构
[0201]
102
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
框架结构的直立构件
[0202]
103
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
框架结构的水平构件
[0203]
104
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
储存格栅/三维格栅
[0204]
105
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
储存列
[0205]
106
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
储存集装箱
[0206]
107
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
堆垛
[0207]
108
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
导轨系统
[0208]
110
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一方向(x)上的第一组平行导轨
[0209]
111
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二方向(y)上的第二组平行导轨
[0210]
115
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
格栅开口
[0211]
119
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
输送列
[0212]
120
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
输送列
[0213]
122
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
格栅单元
[0214]
140
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
输送系统
[0215]
150
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
输送口
[0216]
151
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
夹层
[0217]
155
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
夹层
[0218]
200
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一集装箱装卸运载工具
[0219]
201
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
轮装置
[0220]
300
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二集装箱装卸运载工具
[0221]
301
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
轮装置
[0222]
x
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一方向
[0223]
y
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二方向
[0224]
p
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
导轨系统的水平面
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1