一种物料移动设备的制作方法
1.本技术实施例涉及设备制造领域,具体涉及一种物料移动设备。
背景技术:
2.在生产制造及仓储物流领域,物料的分类和归置是一项必要的工作,而对物料进行分类和归置的方式之一就是对物料进行码垛,将多个物料分别放置在几个不同的栈板上,从而实现物料的分类和归置。而在码垛完成之后,若需要使用物料,则从码好的料垛中取出物料,这个过程也就是拆垛。
3.然而,利用人力对物料进行码垛及拆垛,不仅大大增加了企业的人力成本,而且物料的搬动容易导致人员出现肌肉拉伤或者扭伤的情况,不利于人员安全作业。
4.而现有的搬运机械手只能单独执行搬运栈板的操作,而不能单独执行搬运物料的操作;或者只能单独执行搬运物料的操作,而不能单独执行搬运栈板的操作,因此功能比较单一,机械手的生产能力较低。
技术实现要素:
5.本技术实施例提供了一种物料移动设备,用于对物料进行码垛以及对料垛进行拆垛。
6.本技术实施例第一方面提供了一种物料移动设备,包括:吸盘、框架及可用于夹取栈板的夹取组件,所述夹取组件包括夹取部、驱动机构、安装座及旋转支撑座;
7.所述吸盘安装在所述框架上,所述吸盘用于吸取物料;
8.所述安装座及所述旋转支撑座分别安装在所述框架上,所述驱动机构安装在所述安装座上;
9.所述驱动机构与所述夹取部连接,所述驱动机构用于驱动所述夹取部运动;
10.所述夹取部通过支点与所述旋转支撑座活动连接。
11.优选的,所述夹取组件的数量为多个,多个所述夹取组件中的任意两个分别相对侧地安装在所述框架的两侧。
12.优选的,多个所述夹取组件中的任意两个的夹取部为钩子形状,钩子形状的夹取部用于钩取所述栈板。
13.优选的,多个所述夹取组件中的任意两个的夹取部的末端为平面板,所述平面板的板面的摩擦系数在预设范围内,多个所述夹取组件中的任意两个依靠所述平面板的板面的摩擦力夹取所述栈板。
14.优选的,所述夹取组件还包括浮动连接头,所述浮动连接头的一端与所述夹取部活动连接,另一端与所述驱动机构连接。
15.优选的,所述框架包括多个横梁,所述横梁上设置有螺纹孔,所述吸盘通过螺钉与所述螺纹孔螺纹连接而安装到所述框架上。
16.优选的,所述驱动机构为气缸或液压缸。
17.优选的,所述框架的材料为铝型材。
18.优选的,所述物料移动设备还包括安装法兰,所述安装法兰固定在所述框架上,所述安装法兰用于将所述物料移动设备安装到其他设备上。
19.优选的,所述吸盘为海绵吸盘。
20.从以上技术方案可以看出,本技术实施例具有以下优点:
21.本技术实施例的物料移动设备包括吸盘、框架及可用于夹取栈板的夹取组件,夹取组件包括夹取部、驱动机构、安装座及旋转支撑座,其中吸盘安装在框架上,吸盘可以用于吸取物料,夹取组件通过安装座及旋转支撑座安装在框架上,驱动机构安装在安装座上并与夹取部连接,驱动机构可用于驱动夹取部运动,夹取部通过支点与旋转支撑座活动连接,夹取部可以用于夹取栈板,并在栈板放置到预设的位置上之后,使用吸盘吸取物料,将物料放置到栈板上。同样的,也可以使用吸盘从料垛中取出物料。本技术实施例无需人工码垛或者拆垛,节省了人力成本,避免了人员搬动物料而导致肌肉拉伤或者扭伤等情况的发生。此外,本技术实施例的物料移动设备可以同时执行搬运物料的操作和搬运栈板的操作,大大提高了生产能力。
附图说明
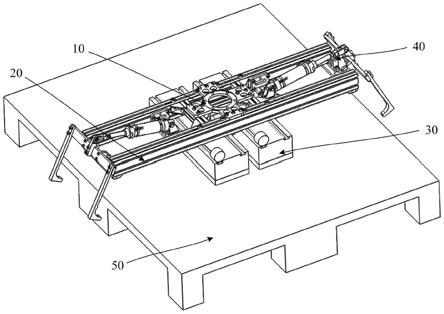
22.图1a为本技术实施例中物料移动设备的结构示意图;
23.图1b为本技术实施例中物料移动设备吸取物料的使用场景示意图;
24.图1c为本技术实施例中物料移动设备的夹取组件的结构示意图。
具体实施方式
25.本技术实施例提供了一种物料移动设备,用于对物料进行码垛以及对料垛进行拆垛。
26.为了使本技术领域的人员更好地理解本技术实施例的技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术实施例技术方案的一部分实施例,而不是全部的实施例。基于本技术实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本技术实施例保护的范围。
27.请参阅图1a、图1b及图1c,图1a示出了本实施例的物料移动设备的结构示意图,图1b示出了物料移动设备搬取物料的使用场景示意图,图1c示出了物料移动设备中的夹取组件40的结构示意图。如图1a所示,本实施例的物料移动设备包括:吸盘30、框架20及可用于夹取栈板50的夹取组件40,如图1c所示,夹取组件40包括夹取部402、驱动机构401、安装座403及旋转支撑座404。
28.其中,吸盘30安装在框架20上。如图1b所示,吸盘30可用于吸取物料60。
29.安装座403及旋转支撑座404安装在框架20上,驱动机构401安装在安装座403上。
30.驱动机构401与夹取部402连接,驱动机构401可以用于驱动夹取部402运动,驱动夹取部402作直线往复运动、摆动、旋转运动或者作其他形式的运动。
31.夹取部402通过旋转支撑座404上的支点4041与旋转支撑座404活动连接,从而为夹取部402的摆动或者其他形式的运动提供支点。
32.本实施例中,安装座403安装在框架20上以及旋转支撑座404安装在框架20上,安装方式可以是可拆卸安装方式或不可拆卸安装方式,其中可拆卸安装方式包括但不限于螺纹安装,不可拆卸安装方式包括但不限于焊接或粘接。
33.本实施例中,夹取组件40的数量可以是多个,则多个夹取组件40中的任意两个可分别相对侧地安装在框架20的两侧。如图1a及图1b所示,2个夹取组件40分别相对侧地安装在框架20的两侧,可以在夹取栈板时相互配合,确保栈板在被夹取的过程中保持平衡。本实施例中,夹取组件40的数量不作限定,可以是2个、3个甚至是3个以上。
34.其中,多个夹取组件40中的任意两个的夹取部可以是钩子形状,钩子形状的夹取部可用于钩取栈板。图1a至图1c所示的夹取部即为钩子形状。
35.此外,多个夹取组件40中的任意两个的夹取部也可以不是钩子形状,而是该夹取部的末端为平面板,并可以设置平面板的板面的摩擦系数足够大,从而使多个夹取组件40中的任意两个的夹取部在夹取栈板时,可以依靠平面板的板面的摩擦力固定栈板,从而使栈板在任意两个夹取部的共同作用下被夹紧并移动。
36.本实施例中,夹取组件40还包括浮动连接头405,浮动连接头405的一端与夹取部402活动连接,另一端与驱动机构401连接。浮动连接头405可以用来消除驱动机构401与夹取部402之间的连接误差,保护驱动机构401以及使驱动机构401运行平稳,延长驱动机构401的使用寿命。
37.本实施例中,驱动机构401可以是气缸,则驱动机构401在运行时将内部的压缩空气的压力能转换为夹取部402运动的机械能,驱动夹取部402作直线往复运动、摆动、旋转运动或者作其他形式的运动。
38.此外,驱动机构401也可以是液压缸,则驱动机构401在运行时将内部的压缩液体的液压能转换为夹取部402运动的机械能,驱动夹取部402作直线往复运动、摆动、旋转运动或者作其他形式的运动。驱动机构401还可以是伺服电机或者其他形式的驱动电机,驱动机构401的具体形式不作限定。
39.本实施例中,吸盘30安装在框架20上的安装方式可以是吸盘30焊接在框架20上,也可以是吸盘30与框架20螺纹连接。其中,框架具有多个横梁,横梁上可以设置有螺纹孔,若吸盘30与框架20螺纹连接,则框架20可以设置有多个螺纹孔,由此吸盘30便可以通过螺钉螺纹连接到横梁的螺纹孔上,从而吸盘30可以安装到框架20的横梁上。
40.其中,设置多个螺纹孔的目的,除了可以安装多个吸盘30,还可以调节多个吸盘30之间的距离。因为物料的尺寸大小不一,如果框架20上所安装的吸盘30有多个,则可以依照螺纹孔的位置相对应地调节吸盘30的安装位置,从而调节多个吸盘30之间的距离,以适应不同尺寸大小的物料。例如,如果物料尺寸较大,则可以使多个吸盘30之间的距离相对较大,因此可以在框架20上选择距离较远的多个螺纹孔的位置作为吸盘30的安装位置。
41.如图1a所示,本实施例的物料移动设备还包括安装法兰10,安装法兰10固定在框架20上,安装法兰10可用于将本实施例的物料移动设备安装到其他设备上,例如,利用安装法兰10将物料移动设备安装到码垛机器人或搬运机器人如四轴机器人、六轴机器人及三轴机械手等标准执行机构,从而实现物料的自动码垛及拆垛。
42.本实施例中,框架20的材料可以是铝型材,铝型材的材质优良,可以使框架20更加牢固,而且铝型材框架的外观整洁且美观。
43.本实施例中,吸盘30可以连接真空泵,在吸盘30接触到物料60的表面时,真空泵对吸盘30与物料60之间所形成的密闭空间进行抽真空,该密闭空间的内外形成气压差,从而产生了作用在物料60的大气压力,在大气压力的作用下,吸盘30可以吸取并固定物料60。本实施例中,吸盘30可以是磁力吸盘、橡胶吸盘或者是海绵吸盘,只要是能够吸取物料的结构即可,具体的结构形式不作限定,优选是海绵吸盘。
44.需要说明的是,图1a及图1b仅作为示例性说明,其示出的吸盘30个数是2个,但在实际应用中,吸盘30的个数可以是任意设置的,本实施例对吸盘30的个数不作限定。
45.本实施例中物料移动设备包括吸盘30、框架20及可用于夹取栈板的夹取组件40,夹取组件40包括夹取部402、驱动机构401、安装座403及旋转支撑座404,其中吸盘30安装在框架20上,吸盘30可以用于吸取物料60,夹取组件40通过安装座403及旋转支撑座404安装在框架20上,驱动机构401安装在安装座上并与夹取部402连接,驱动机构401可用于驱动夹取部402运动,夹取部402通过支点4041与旋转支撑座404活动连接,夹取部402可以用于夹取栈板,并在栈板放置到预设的位置上之后,使用吸盘30吸取物料,将物料放置到栈板上。同样的,也可以使用吸盘30从料垛中取出物料。本技术实施例无需人工码垛或者拆垛,节省了人力成本,避免了人员搬动物料而导致肌肉拉伤或者扭伤等情况的发生。此外,本技术实施例的物料移动设备可以同时执行搬运物料的操作和搬运栈板的操作,大大提高了生产能力。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1