一种物料搬运系统
一种物料搬运系统
【技术领域】
1.本发明涉及一种物料搬运系统,尤其涉及一种生产车间内物料搬运系统,属于生产车间附属设备领域。
背景技术:
2.生产车间内经常需要对物料进行搬运,例如将生产线a输送过来的物料搬运到生产线b上,然而目前多采用工业机器人进行搬运,例如abb公司或安川电机生产的工业搬运机器人,然而该种类型的机器人体积庞大、价格昂贵、后期维护费用相当高,不利于中小型企业扩大生产规模,同时该种类型机器人多是串联型机器人构型,需要提前进行示教,无形中增加了适用性的难度。更需要提及的是,当所转运的物料质量较大、体积较大的时候,现有的机器人容易损坏,即过载损伤,尤其是对电机和内部线路的损坏最为明显,同时其末端难以配套对应的末端抓取机构,更进一步限制了其应用范围。
技术实现要素:
3.针对上述问题,本发明提供了一种物料搬运系统,尤其涉及一种结构简单、运行方便、价格低廉的搬运装置。本发明具体技术方案如下:
4.一种物料搬运系统,包括输送带1、输送带2、搬运抓取装置,所述搬运抓取装置设置于所述输送带1和输送带2之间,用于将所述输送带1上的工件搬运至所述输送带2上,所述搬运抓取装置包括搬运装置、连接架、抓取装置,所述搬运装置数量为两个,且两个所述搬运装置共同连接述连接架,并通过所述连接架与所述抓取装置连接。
5.进一步,所述搬运装置包括支架a、驱动电机、凸轮板杆、短杆、固定杆、连杆一、连杆二、连连杆三、末端竖杆、支架b,其中所述支架a和所述支架b底端均支撑于地面,所述支架a顶端支撑所述驱动电机,所述驱动电机输出轴连接所述凸轮板杆一端的的圆板部并构成凸轮驱动结构,所述凸轮板杆另一端连接所述短杆,所述短杆的另一端通过贯穿所述固定杆一端的铰接轴连接于所述铰接轴的一端,所述铰接轴的另一端连接所述连杆一一端,所述连杆一另一端连接于所述连杆二的一端,所述连杆二的另一端连接于所述连杆三的一端,所述连杆三的另一端连接于所述固定杆的另一端,所述末端竖杆一端连接于所述连杆二中间部,所述末端竖杆另一端连接所述连接架,所述支架b顶端连接于所述固定杆中部。
6.进一步,所述连接架为框架形结构,所述抓取装置为两个,分别并列设置于所述连接架两侧的框架上。
7.进一步,所述抓取装置包括驱动气缸、驱动杆以及多个末端夹爪,所述驱动气缸驱动所述驱动杆以带动所述多个末端夹爪进行开合运动。
8.进一步,所述末端夹爪包括三叉杆、上下两个夹爪盖板、拉动杆一、拉动杆二、拉动杆三、夹爪体、推动杆,所述三叉杆的一端铰接于所述驱动杆,所述三叉杆第二端铰接于所述拉动杆一一端,所述三叉杆第三端铰接于所述推动杆一端,所述拉动杆一另一端铰接于所述拉动杆二一端,所述拉动杆二另一端铰接于所述拉动杆三一端,所述拉动杆三另一端
铰接于所述一个夹爪体,所述推动杆另一端铰接于所述另一个夹爪体。
9.进一步所述三叉杆中间部设置有铰接轴,所述拉动杆二第三端同样设置有所述铰接轴,所述上下两个夹爪盖板通过所述铰接轴连接。
10.进一步,所述夹爪体包括两个垂直夹杆,所述两个垂直夹杆用于夹取所述工件。
11.进一步,所述驱动杆上的所述末端夹爪的数量为三个。
12.本发明具有如下有益技术效果:本发明结构简单,组装维护方便,同时体积小巧、结构巧妙,搬运平稳,尤其适用于对大型笨重物料进行搬运。
【附图说明】
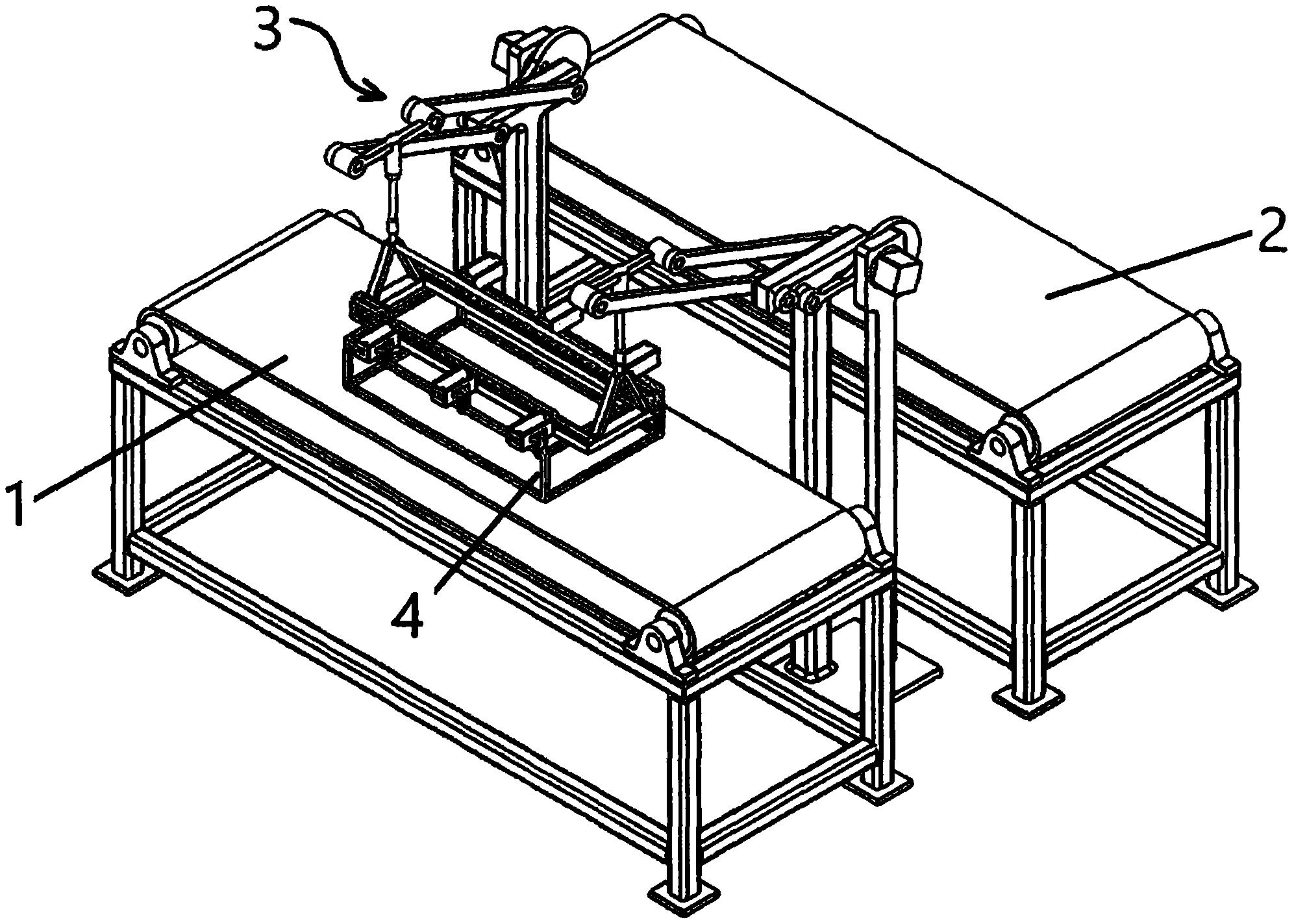
13.图1为本发明物料搬运系统整体示意性附图;
14.图2为本发明物料搬运系统搬运过程(物料处于输送带1上方)示意性附图;
15.图3为本发明物料搬运系统搬运过程(物料处于输送带2上方)示意性附图;
16.图4为本发明搬运装置运动过程起始阶段示意性附图;
17.图5为本发明搬运装置运动过程中间阶段示意性附图;
18.图6为本发明搬运装置运动过程末尾阶段示意性附图;
19.图7为本发明抓取装置示意性附图;
20.图8为图7中a的放大图;
21.图9为本发明抓取装置另一角度示意性附图;
【具体实施方式】
22.首先对本发明附图中附图标记指代的具体特征进行说明,其中:
23.输送带1,输送带2,
24.搬运抓取装置3,
25.搬运装置31,支架a311,驱动电机312,凸轮板杆313,短杆314,固定杆315,连杆一316,连杆二317,连连杆三318,末端竖杆319,支架b320,
26.连接架32,
27.抓取装置33,驱动气缸331,驱动杆333,
28.末端夹爪332,三叉杆3321,夹爪盖板3322,拉动杆一3323,拉动杆二3324,拉动杆三3325,夹爪体3326,推动杆3327,垂直夹杆3328,
29.工件4。
30.参照图1-3,本发明物料搬运系统包括输送带1、输送带2、搬运抓取装置3,其中输送带1是将工件4输送至搬运抓取装置3侧,搬运抓取装置3将工件4搬运至输送带2,随后输送带2将工件4传输送至下一工位,此处的工件4是框架形结构,例如可以是汽车底盘架、航天发动机固定架、重型机械吊架,主要是尺寸和质量较大的工件。
31.本发明搬运抓取装置3设置于两条平行的输送带1和输送带2之间,搬运抓取装置3包括搬运装置31、连接架32、抓取装置33,搬运装置31数量为两个,且两个搬运装置31共同连接连接架32,并通过连接架32与抓取装置33连接,通过两个搬运装置31协同发力实现重型工件在输送带之间的搬运。
32.参照图4-6,本发明搬运装置31包括支架a311、驱动电机312、凸轮板杆313、短杆
314、固定杆315、连杆一316、连杆二317、连连杆三318、末端竖杆319、支架b320,其中支架a311和支架b320起到支撑作用,其底端均支撑于地面或基座上,支架a311顶端支撑驱动电机312,驱动电机312输出轴连接凸轮板杆313一端的的圆板部并构成凸轮驱动结构,凸轮板杆313另一端连接短杆314,短杆314的另一端通过贯穿固定杆315一端的铰接轴连接于铰接轴的一端,铰接轴的另一端连接连杆一316一端,连杆一316另一端连接于连杆二317的一端,连杆二317的另一端连接于连杆三318的一端,连杆三318的另一端连接于固定杆315的另一端,末端竖杆319一端连接于连杆二317中间部,末端竖杆319另一端连接连接架32,连接架32与抓取装置33固定连接,支架b320顶端连接于固定杆315中部。
33.本发明搬运装置31的工作原理如下:驱动电机312旋转,带动凸轮板杆313一端的圆板形凸轮机构旋转,进而通过凸轮板杆313另一侧的细杆带动短杆314旋转,短杆314通过贯穿固定杆315的铰接轴带动连杆一316旋转,连杆一316、连杆二317、连连杆三318、固定杆315构成四杆机构,因此连杆一316可以带动连杆二317、连连杆三318在空间上转动,在连杆二317转动的同时带动与其固定的末端竖杆319在空间上实现平移运动,进而最后带动抓取装置33实现平移搬运运动。
34.参照图1-3,本发明抓取装置33为两个,分别并列设置于连接架32两侧的框架上,具体设置方式是反向对称设置,即两个驱动气缸331分别位于连接架32两头,这样会使得整个抓取装置33和连接架32重心稳定,利于稳定搬运工件4。
35.参照图7-9,本发明抓取装置33包括驱动气缸331、驱动杆333以及多个末端夹爪332,驱动气缸331驱动驱动杆333以带动所述多个末端夹爪332进行开合运动,共同夹取工件4。末端夹爪332包括三叉杆3321、上下两个夹爪盖板3322、拉动杆一3323、拉动杆二3324、拉动杆三3325、夹爪体3326、推动杆3327,所述三叉杆3321具有三个分叉杆,其中三叉杆3321的一端铰接于驱动杆333,三叉杆3321第二端铰接于拉动杆一3323一端,三叉杆3321第三端铰接于推动杆3327一端,拉动杆一3323另一端铰接于拉动杆二3324(拉动杆二3324呈弯折的对号形)一端,拉动杆二3324另一端铰接于拉动杆三3325一端,拉动杆三3325另一端铰接于一个夹爪体3326,推动杆3327另一端铰接于另一个夹爪体3326。三叉杆3321中间部设置有铰接轴3329,拉动杆二3324第三端同样设置有铰接轴3329,上下两个夹爪盖板3322通过铰接轴3329连接。
36.由于抓取装置33与连接架32的布置关系,为夹取工件4,在夹爪体3326上设置两个垂直夹杆3328,利用两个垂直夹杆3328实现夹取工件4的目的。
37.本发明抓取装置33的工作原理如下:驱动气缸331的气缸杆伸长,带动驱动杆333也伸长,驱动杆333伸长的过程中通过三叉杆3321的一端拉动拉动杆一3323靠近,拉动杆一3323在拉动的过程中再拉动拉动杆二3324旋转,拉动杆二3324旋转的同时推动拉动杆三3325展平,拉动杆三3325展平的同时推动与其连接的一个夹爪体3326向另一个夹爪体3326靠近,同时三叉杆3321的另一端也推动推动杆3327旋转,推动杆3327旋转的同时进一步推动两个夹爪体3326靠近,最终实现一个驱动源带动多个夹爪开合以夹取工件。
38.优选的,单侧驱动杆333上的末端夹爪332的数量为三个,当然也可以是多个,只要稳定抓取工件即可。
39.通过本发明技术方案可以看出,本发明结构简单,组装维护方便,同时体积小巧、结构巧妙,搬运平稳,尤其适用于对大型笨重物料进行搬运。
40.最后需要说明,凡是不脱离本发明核心技术构思的发明创造,均应当认为包含在本发明保护围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1