仿形压块组件自动覆膜组装设备的制作方法
1.本发明涉及覆膜组装设备技术领域,具体涉及一种仿形压块组件自动覆膜组装设备。
背景技术:
2.仿形压块广泛在光电、半导体、通讯、无线电、牙科珠宝首饰等包装盒领域,对于仿形压块的覆膜、包装一般都是人工完成,将包装盒、丝网模板、内膜、防形压板仿形压块、包装膜依次包装、覆膜,人工成本大,自动化程度地低,特别是对于内膜的包装,需要将上膜与底膜与内膜分离后再行覆膜,人工极大,急需一种能够将仿形压块组件自动化覆膜、包装的设备。
技术实现要素:
3.本发明所要解决的技术问题是针对上述缺陷,提供一种自动化强度高、节约人力成本的仿形压块组件自动覆膜组装设备
4.本发明解决其技术问题所采用的技术方案如下:一种仿形压块组件自动覆膜组装设备,包括机体架、设置在机体架上的导轨以及沿导轨传送方向依次排布的第一上料装置、第二上料装置、第一覆膜装置、第三上料装置、第二覆膜装置、第四上料装置和切割装置,所述导轨上沿传送方向均匀分布有若干个底座;
5.所述第一上料装置用于将包装盒传送并夹取至底座内;
6.所述第二上料装置用于将丝网模板传送并安装在包装盒内;
7.所述第一覆膜装置用于剥离内膜并将内膜涂覆在丝网模板顶面;
8.所述第三上料装置用于将防形压板传送并盖合在覆有内膜的丝网模板顶面;
9.所述第四上料装置用于将仿形压块传送并盖合在防形压板顶面,
10.所述第二覆膜装置用于在方形压块顶面涂覆包装膜;
11.所述切割装置用于加热、切割内膜和包装膜。
12.进一步地,所述第一上料装置包括第一电动旋转台和第一机械手,所述第一电动旋转台设置在导轨的进料端,所述第一机械手包括第一机架、第一十字丝杠模组、第一吸盘架和第一吸笔,所述第一机架设置在第一旋转台一侧,所述第一十字丝杠模组安装在第一机架上,第一十字丝杠模组上安装有第一滑块且第一十字丝杠模组可驱动第一滑块前后、上下运动,所述第一吸盘架与第一滑块固定连接,所述第一吸笔安装在第一吸盘架上并用于吸取包装盒。
13.进一步地,所述第二上料装置包括进料输送带和第二机械手,所述第二机械手包括第二机架、第二十字丝杠模组、第二手指气缸、第二夹爪,所述第二十字丝杠模组安装在第二机架上,第二十字丝杠模组上安装有第二滑块且第二十字丝杠模组可驱动第二滑块前后、上下运动,所述第二手指气缸与第二滑块固定连接,第二手指气缸与第二夹爪连接并可驱动第二夹爪夹取丝网模板传送并安装在包装盒顶面。
14.进一步地,所述第一覆膜装置包括第一覆膜机架以及设置在第一覆膜机架上的第一放卷轴、第一减速电机、驱动电机、第一分卷轴、第一旋转气缸、上膜卷绕轴、第一张紧轴、第二分卷轴和底膜卷绕轴,所述第一放卷轴用于放置原膜,所述驱动电机的输出轴与第一放卷轴、上膜卷绕轴皮带传动连接,驱动电机驱动第一放卷轴和上膜卷绕轴同步旋转,第一分卷轴用于接收从第一放卷轴传送的原膜,所述上膜卷绕轴用于接收并卷绕第一分卷轴剥离开的上膜,所述第一旋转气缸与第一张紧轴连接并可驱动第一张紧轴旋转,第一张紧轴用于接收剥离上膜后的内膜与底膜,所述第二分卷轴用于接收第一张紧轴传送的内膜与底膜,第一减速电机与底膜卷绕轴连接并可驱动底膜卷绕轴卷绕从第二分卷轴剥离开的底膜,第二分卷轴输出内膜。
15.进一步地,所述第三上料装置包括上料推台和第三机械手,所述上料推台包括放置平台以及设置在放置平台上的推料气缸、推板和码料架,所述推料气缸与推板连接并可驱动推板推动防形压板穿过码料架底部、沿放置平台方向运动,所述第三机械手包括第三机架以及设置在第三机架上的第三十字丝杠模组、第三滑块、第三手指气缸和第三夹爪,所述第三十字丝杠模组与第三滑块连接并可驱动第三滑块前后、上下运动,所述第三手指气缸安装在第三滑块上并可驱动第三夹爪夹取防形压板传送并安装在丝网模板顶面。
16.进一步地,所述第三上料装置还包括支撑装置,所述支撑装置包括升降气缸、电缸和支撑板和夹板,所述升降气缸固定在第三机架上,所述升降气缸通过连接板与电缸连接并可驱动电缸上下升降,所述电缸与支撑板连接并可驱动支撑板前后移动,夹板固定在支撑板下方。
17.进一步地,所述第四上料装置包括第四旋转台和第四机械手,所述第四机械手包括第四十字丝杠模组、第四滑块和第四吸笔,所述第四十字丝杠模组与第四滑块连接,所述第四十字丝杠模组通过第四滑块与第四吸笔连接,第四十字丝杠模组可驱动第四吸笔前后、上下移动并吸取仿形压块传送并盖合在防形压板顶面。
18.进一步地,所述第二覆膜装置包括第二放卷轴、步进电机和第二张紧轴,所述步进电机与第二张紧轴连接并可驱动第二张紧轴旋转,所述第二放卷轴与第二张紧轴皮带传动连接,第二放卷轴用于安装包装膜,第二放卷轴用于放卷包装膜。
19.进一步地,切割装置包括第五十字丝杠模组、加热划刀、第六十字丝杠模组和裁剪刀,所述加热划刀设置在靠近第二覆膜装置的一侧,第五十字丝杠模组与加热划刀连接并可驱动加热划刀前后、上下移动,从而初步按压、热划内膜与包装膜,所述裁剪刀设置在加热划刀远离第二覆膜装置的一侧,第六十字丝杠模组和与裁剪刀连接并可驱动裁剪刀前后、上下移动,从而剪断内膜与包装膜。
20.本发明的有益效果是:采用上述方案,将包装盒、丝网模板、内膜、防形压板仿形压块、包装膜依次包装、覆膜,自动化强度高,节约了人力成本。
附图说明
21.通过下面结合附图的详细描述,本发明前述的和其他的目的、特征和优点将变得显而易见。
22.其中:1、第一上料装置;11、第一电动旋转台;12、第一机架;13、第一十字丝杠模组;14、第一吸盘架;15、第一吸笔;2、第二上料装置;21、进料输送带;22、第二机架;23、第二
十字丝杠模组;24、第二手指气缸;25、第二夹爪;3、第一覆膜装置;31、第一覆膜机架;32、第一放卷轴;33、第一减速电机;34、第一分卷轴;35、第一旋转气缸;351、连杆;36、上膜卷绕轴;37、第一张紧轴;38、第二分卷轴;39、底膜卷绕轴;4、第三上料装置;411、放置平台;412;推料气缸;413;推板;414;码料架;421、第三机架;422、第三十字丝杠模组;423、第三滑块;424、第三手指气缸;425、第三夹爪;431、升降气缸;432、电缸;433、支撑板;434、夹板;5、第二覆膜装置;51、第二放卷轴;52、步进电机;53、第二张紧轴;6、第四上料装置;61、第四旋转台;62、第四十字丝杠模组;63、第四滑块;64、第四吸笔;7、切割装置;71、第五十字丝杠模组;72、加热划刀;73、第六十字丝杠模组;74、裁剪刀;8、下料装置;91、包装盒;92、丝网模板;93、内膜;94、上膜;95、底膜;96、包装膜;97、防形压板;98、仿形压块;99、底座。
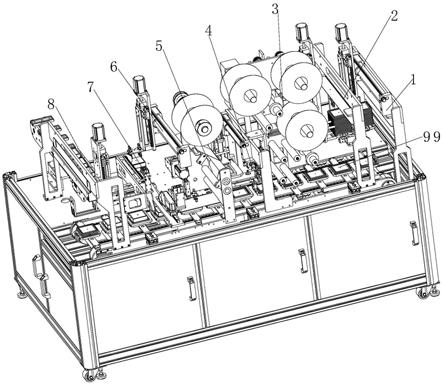
23.图1为本发明的结构示意图;
24.图2为本发明的第一上料装置的结构示意图;
25.图3为本发明的第二上料装置的结构示意图;
26.图4为本发明的第一覆膜装置的结构示意图;
27.图5为本发明的第一覆膜装置的剥离内膜使用状态结构示意图;
28.图6为本发明的第三上料装置的结构示意图;
29.图7为本发明的第四上料装置与第二覆膜装置的结构示意图;
30.图8为本发明的第四上料装置、第二覆膜装置、切割装置的结构示意图;。
具体实施方式
31.下面结合附图对本发明的较佳实施例进行详细阐述,以使本发明的优点和特征能更易被本领域人员理解,从而对本发明的保护范围做出更为清楚明确的界定。
32.如图1-8所示,一种仿形压块98组件自动覆膜组装设备,包括机体架、设置在机体架上的导轨以及沿导轨传送方向依次排布的第一上料装置1、第二上料装置2、第一覆膜装置3、第三上料装置4、第二覆膜装置5、第四上料装置6和切割装置7,导轨上沿传送方向均匀分布有若干个底座99,底座99内具有安装腔,安装腔的形状根据包装盒91的大小、形状设计。
33.如图2所示,第一上料装置1用于将包装盒91传送并夹取至底座99内,第一上料装置1包括第一电动旋转台11和第一机械手,第一电动旋转台11设置在导轨的进料端,所述第一机械手包括第一机架12、第一十字丝杠模组13、第一吸盘架14和第一吸笔15,所述第一机架12设置在第一旋转台一侧,第一十字丝杠模组13安装在第一机架12上,第一十字丝杠模组13上安装有第一滑块且第一十字丝杠模组13可驱动第一滑块前后、上下运动,第一吸盘架14与第一滑块固定连接,第一吸笔15安装在第一吸盘架14上并用于吸取包装盒91。
34.如图3所示,第二上料装置2用于将丝网模板92传送并安装在包装盒91内,所述第二上料装置2包括进料输送带21和第二机械手,第二机械手包括第二机架22、第二十字丝杠模组23、第二手指气缸24、第二夹爪25,第二十字丝杠模组23安装在第二机架22上,第二十字丝杠模组23上安装有第二滑块且第二十字丝杠模组23可驱动第二滑块前后、上下运动,第二手指气缸24与第二滑块固定连接,第二手指气缸24与第二夹爪25连接并可驱动第二夹爪25夹取丝网模板92传送并安装在包装盒91顶面。
35.如图4-5所示,所述第一覆膜装置3包括第一覆膜机架31以及设置在第一覆膜机架
31上的第一放卷轴32、第一减速电机33、驱动电机、第一分卷轴34、第一旋转气缸35、上膜卷绕轴36、第一张紧轴37、第二分卷轴38和底膜卷绕轴39,所述第一放卷轴32用于放置原膜,所述驱动电机的输出轴与第一放卷轴32、上膜卷绕轴36皮带传动连接,驱动电机驱动第一放卷轴32和上膜卷绕轴36同步旋转,第一分卷轴34用于接收从第一放卷轴32传送的原膜,所述上膜卷绕轴36用于接收并卷绕第一分卷轴34剥离开的上膜94,所述第一旋转气缸35与第一张紧轴37连接并可驱动第一张紧轴37旋转,第一张紧轴37用于接收剥离上膜94后的内膜93与底膜95,所述第二分卷轴38用于接收第一张紧轴37传送的内膜93与底膜95,第一减速电机33与底膜卷绕轴39连接并可驱动底膜卷绕轴39卷绕从第二分卷轴38剥离开的底膜95,第二分卷轴38输出内膜93,进一步地,所述第一放卷轴32与底膜卷绕轴39皮带传动连接,所述上膜卷绕轴36与第一张紧轴37皮带传动连接,所述第一旋转气缸35连接有连杆351,所述第一张紧轴37安装在连杆351远离第一旋转气缸35的一端,第一旋转气缸35通过连杆351驱动第一张紧轴37旋转,当然,第一减速电机33、驱动电机、第一旋转气缸35等驱动件均与控制系统连接。
36.优选地,第一旋转气缸35侧部上方和下方分别安装有第一感应开关和第二感应开关,第一感应开关和第二感应开关与控制系统连接,第一感应开关检测到第一张紧轴37逆时针旋转到上限位置时,第一旋转气缸35停止驱动第一张紧轴37继续逆时针旋转,转为顺时针旋转,当第二感应开关检测到第一张紧轴37顺时针旋转到下限位置时,第一旋转气缸35停止驱动第一张紧轴37继续顺时针旋转,转为逆时针旋转。
37.优选地,第一覆膜机架31下方设有竖直方向设置的滑槽,滑槽内安装有调节辊,第一覆膜机架31的背面与调节辊对应位置设有与调节辊固定连接的限位块,限位块的宽度大于滑槽的宽度,底膜95从调节辊底部环绕后安装在底膜95卷绕膜上,滑槽顶部和底部均设有传感器,由于调节辊的质量轻,底膜卷绕轴39卷绕较紧时,调节辊沿滑槽上移,直至到达上限位,传感器检测到后底膜卷绕轴39减缓卷绕,直至停止,然后等待第二分卷轴38继续放卷底膜95,调节辊下移至下限位,传感器检测到后,底膜卷绕轴39开始卷绕,自动化强度极高。
38.如图6所示,所述第三上料装置4用于将防形压板97传送并盖合在覆有内膜93的丝网模板92顶面,进一步地,所述第三上料装置4包括上料推台和第三机械手,所述上料推台包括放置平台411以及设置在放置平台411上的推料气缸412、推板413和码料架414,所述推料气缸412与推板413连接并可驱动推板413推动防形压板97穿过码料架414底部、沿放置平台411方向运动,码料架414底部具有通过槽,所述第三机械手包括第三机架421以及设置在第三机架421上的第三十字丝杠模组422、第三滑块423、第三手指气缸424和第三夹爪425,所述第三十字丝杠模组422与第三滑块423连接并可驱动第三滑块423前后、上下运动,所述第三手指气缸424安装在第三滑块423上并可驱动第三夹爪425夹取防形压板97传送并安装在丝网模板92顶面,所述第三上料装置4还包括支撑装置,所述第三上料装置4还包括支撑装置,所述支撑装置包括升降气缸431、电缸432和支撑板433和夹板434,所述升降气缸431固定在第三机架421上,所述升降气缸431通过连接板与电缸432连接并可驱动电缸432上下升降,所述电缸432与支撑板433连接并可驱动支撑板433前后移动,夹板434固定在支撑板433下方,夹板434中部具有凹槽,内膜93传递过来时,通过夹板434上的凹槽使得内膜93平整传递。
39.如图6-8所示,所述第四上料装置6用于将仿形压块98传送并盖合在防形压板97顶面,进一步地,所述第四上料装置6包括第四旋转台61和第四机械手,所述第四机械手包括第四十字丝杠模组62、第四滑块63和第四吸笔64,所述第四十字丝杠模组62与第四滑块63连接,所述第四十字丝杠模组62通过第四滑块63与第四吸笔64连接,第四十字丝杠模组62可驱动第四吸笔64前后、上下移动并吸取仿形压块98传送并盖合在防形压板97顶面。
40.如图6-8所示,所述第二覆膜装置5用于在方形压块顶面涂覆包装膜96,所述第二覆膜装置5包括第二放卷轴51、步进电机52、第二张紧轴53以及若干个导向筒,所述步进电机52与第二张紧轴53连接并可驱动第二张紧轴53旋转,调节包装膜96的张紧度,第二放卷轴51用于安装包装膜96,第二放卷轴51用于放卷包装膜96,包装膜96通过第二放卷轴51传送至导向筒、第二张紧轴53,最后通过底部的导向筒传递出。
41.如图6-8所示,所述切割装置7用于加热、切割内膜93和包装膜96,进一步地,切割装置7包括第五十字丝杠模组71、加热划刀72、第六十字丝杠模组73和裁剪刀74,所述加热划刀72设置在靠近第二覆膜装置5的一侧,第五十字丝杠模组71与加热划刀72连接并可驱动加热划刀72前后、上下移动,从而初步按压、热划内膜93与包装膜96,所述裁剪刀74设置在加热划刀72远离第二覆膜装置5的一侧,第六十字丝杠模组73和与裁剪刀74连接并可驱动裁剪刀74前后、上下移动,从而剪断内膜93与包装膜96,需要说明的是加热划刀72和裁剪刀74为现有技术常用装置,加热划刀72主要起加热、按压的作用,而裁剪刀74是起主要切断作用。
42.如图8所示,下料装置8包括第五机械手和传送带,第五机械手包括第七十字丝杠模组和第四夹爪和第四手指气缸,第七十字丝杠模组与第四手指气缸上下升降、左右移动,第手指气缸与第四夹爪连接并可驱动第四夹爪夹取成品仿形压块98组件、出料。
43.需要说明的是本发明中的第一十字丝杠模组13、第二十字丝杠模组23、第三十字丝杠模组422、第四十字丝杠模组62、第五十字丝杠模组71、第六十字丝杠模组73、第七十字丝杠模组均为常用现有技术,可在平面内进行x、y方向进行驱动部件移动,现有技术中也有可在平面内进行x、y、z方向进行移动,此处为了节约成本,仅使用十字型丝杠模组。
44.工作原理:从第一上料装置1开始,将第一机械手将包装盒91从第一电动旋转台11夹取至底座99上,包装盒91、底座99随着导轨传送至第二上料装置2,第二机械手从进料输送带21夹取丝网模板92至包装盒91上,丝网模板92、包装盒91、底座99传送至第一覆膜装置3,第一覆膜装置3将原膜内的内膜93剥离出后覆盖在丝网模板92上,需要说明的是,首次覆膜需要手动覆盖,后续的便可自动覆膜,丝网模板92、包装盒91、底座99覆膜后传送至第三上料装置4,第三机械手将防形压板97从上料推台传送并盖合在覆有内膜93的丝网模板92顶面,防形压板97、丝网模板92、包装盒91、底座99传送至第四上料装置6,第四机械手将仿形压块98从第四旋转台61传送并盖合在防形压板97顶面,继续传送,第二覆膜装置5在仿形压块98顶面覆盖包装膜96,通过加热划刀72预热、初步划开,再通过裁剪刀74剪断内膜93和包装膜96,最后仿形压块98组件包装后传送至下料装置8,第五机械手夹取将仿形压块98组件后送至传送带。
45.本发明的有益效果是:采用上述方案,将包装盒91、丝网模板92、内膜93、防形压板97仿形压块98、包装膜96依次包装、覆膜,自动化强度高,节约了人力成本。
46.在这里示出和描述的所有示例中,任何具体值应被解释为仅仅是示例性的,而不
是作为限制,因此,示例性实施例的其他示例可以具有不同的值。
47.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
48.另外,在本发明实施例的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“设置”、“设有”等应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
49.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
50.最后应说明的是:以上上述的实施例,仅为本发明的具体实施方式,用以说明本发明的技术方案,而非对其限制,本发明的保护范围并不局限于此,尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1