智能物流分拣小车
1.本发明属于物流运输技术领域,涉及一种智能物流分拣小车。
背景技术:
2.对于仓储物流行业来说,需要将各种物品搬运到目标位置,而智能物流小车则是实现物流自动化中必不可少的一个环节。智能物流小车在物流仓储行业中的应用,不仅能够提高其生产水平,以实现高效运转。达到减轻人工劳动力,降低生产成本的效果。物流小车的使用能极大地提升仓储物流行业的工作效率,提升仓储物流行业的效率和速度。现有的物流小车在抓取纸箱包裹时,一般采用开合式机械手、夹爪或者是叉式结构来抓取纸箱,占用空间大且在抓取过程中容易破坏纸箱,造成货物损坏,同时装载卸载包裹稳定较差,运输效率不高。
3.为了克服现有技术的不足,人们经过不断探索,提出了各种各样的解决方案,如中国专利公开了一种新型智能物流小车[申请号:201721630627.0],它包括小车底座、机械臂及载物台,小车底座上支有铜柱,机械臂的底板设置在铜柱上,使机械臂与小车固定,载物台左右对称固定设置在机械臂的底板两侧。上方是五自由度的机械臂,其特点是前端爪子永远保持为水平状态。机械臂底部为三个180
°
标准舵机mg995,前端两个为180
°
微型舵机mg90s,舵机也由arduinouno控制板控制。通过机械底座左右及中心的三个mg995舵机的配合控制,机械臂可以到达长度范围内想要的位置,并在微型舵机mg90s的控制下抓取物料,还能进行一定角度旋转,从而实现抓物料这一过程。但是该方案在抓取包裹过程中仍然容易破坏纸箱,造成货物损坏,同时存在装载卸载包裹稳定较差,运输效率不的缺陷。
技术实现要素:
[0004]
本发明的目的是针对上述问题,提供一种智能物流分拣小车。
[0005]
为达到上述目的,本发明采用了下列技术方案:
[0006]
一种智能物流分拣小车,包括车底板和车顶板,所述的车底板上设有若干沿车底板中心线对称的驱动轮,所述的车底板上还设有动力模块,所述的动力模块与驱动轮相连,所述的车顶板上设有可沿周向转动的转动台,所述的转动台上设有可上下摆动的机械臂件,所述的机械臂件远离转动台一端设有吸盘式包裹识别吸附组件,所述的车顶板上还设有可翻转的包裹托盘,所述的包裹托盘与吸盘式包裹识别吸附组件的位置相对应。
[0007]
在上述的智能物流分拣小车中,所述的车顶板上设有两个沿车顶板中心线对称的托盘连接板,所述的包裹托盘与托盘连接板通过转轴连接,所述的包裹托盘下方设有托盘摆杆件,所述的托盘摆杆件与包裹托盘相连。
[0008]
在上述的智能物流分拣小车中,所述的吸盘式包裹识别吸附组件包括设置于机械臂件上的吸盘固定板,所述的吸盘固定板底部设有若干沿吸盘固定板中心线对称的包裹吸盘,所述的吸盘固定板上设有包裹识别器。
[0009]
在上述的智能物流分拣小车中,所述的机械臂件远离转动台一端设有吸附前端总
成块,所述的吸盘固定板和包裹识别器分别与吸附前端总成块固定连接,所述的包裹识别器为包裹扫码器。
[0010]
在上述的智能物流分拣小车中,所述的包裹识别器的水平高度高于包裹吸盘的水平高度,所述的车底板上设有气泵,所述的气泵与包裹吸盘相连。
[0011]
在上述的智能物流分拣小车中,所述的车顶板上设有转台固定架,所述的转动台位于转台固定架内且转动台与转台固定架转动配合,所述的车顶板上还设有周向转动器,所述的周向转动器的转动轴与转动台相连。
[0012]
在上述的智能物流分拣小车中,所述的转动台与转台固定架之间设有轴承,所述的轴承为滚珠轴承,所述的周向转动器的转动轴贯穿通过轴承。
[0013]
在上述的智能物流分拣小车中,所述的机械臂件包括设置于转动台顶部的大转臂,所述的大转臂远离转动台一端设有中转臂,所述的中转臂远离大转臂一端设有小转臂,所述的吸附前端总成块与小转臂相连,所述的小转臂前端设有y叉架,所示的吸附前端总成块位于y叉架内。
[0014]
在上述的智能物流分拣小车中,所述的车顶板上设有驱动安装架,所述的驱动安装架上设有金属舵机,所述的金属舵机的转动轴与托盘摆杆件相连,所述的托盘摆杆件包括设置于车顶板上的连杆和摇杆,所述的连杆与金属舵机的转动轴相连,所述的摇杆与包裹托盘相连。
[0015]
在上述的智能物流分拣小车中,所述的车顶板上还设有托盘承托块,所述的托盘承托块与包裹托盘相抵接配合,所述的包裹托盘呈方抖状,所述的车底板底部设有五路循迹板和若干沿车底板中心线对称的侧循迹板。
[0016]
与现有的技术相比,本发明的优点在于:
[0017]
1、本发明通过在小车结构上设置机械臂件、包裹托盘、包裹识别器和包裹吸盘,可在装载前,通过包裹识别器先对包裹进行识别,识别完毕后将包裹吸附到包裹吸盘上,将转动台转动,使得包裹吸盘以及包裹转动至包裹托盘上方,将包裹装载于包裹托盘上,再启动小车,将位于包裹托盘上的包裹卸载到分拣区,完成自主装载、识别以及卸载包裹,占用空间小且可适用不同重量以及大小的纸箱包裹,且不会对纸箱造成破坏以及货物损伤,装载卸载包裹稳定,智能化程度和运输效率较高。
[0018]
2、本发明通过将包裹识别器的水平高度设置成高于包裹吸盘的水平高度,确保在使用包裹吸盘时,包裹识别器不会与包裹发生碰撞,达到互不干涉。
[0019]
本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明
[0020]
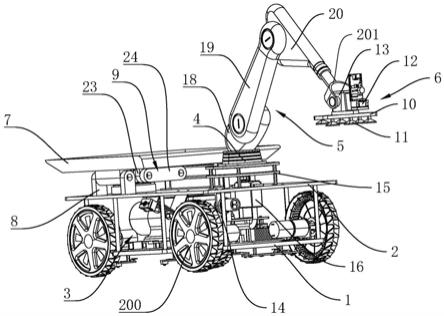
图1是本发明的结构示意图。
[0021]
图2是本发明另一个方向的结构示意图。
[0022]
图3是本发明另一个方向的结构示意图。
[0023]
图中:车底板1、车顶板2、驱动轮200、y叉架201、五路循迹板202、侧循迹板203、动力模块3、转动台4、机械臂件5、吸盘式包裹识别吸附组件6、包裹托盘7、托盘连接板8、托盘摆杆件9、吸盘固定板10、包裹吸盘11、包裹识别器12、吸附前端总成块13气泵14、转台固定
架15、周向转动器16、轴承17、大转臂18、中转臂19、小转臂20、驱动安装架21、金属舵机22、连杆23、摇杆24、托盘承托块25。
具体实施方式
[0024]
下面结合附图对本发明进行进一步说明。
[0025]
如图1、图2、图3所示,一种智能物流分拣小车,包括车底板1和车顶板2,所述的车底板1上设有若干沿车底板1中心线对称的驱动轮200,所述的车底板1上还设有动力模块3,所述的动力模块3与驱动轮200相连,所述的车顶板2上设有可沿周向转动的转动台4,所述的转动台4上设有可上下摆动的机械臂件5,所述的机械臂件5远离转动台4一端设有吸盘式包裹识别吸附组件6,所述的车顶板2上还设有可翻转的包裹托盘7,所述的包裹托盘7与吸盘式包裹识别吸附组件6的位置相对应。
[0026]
在本实施例中,动力模块3用以驱动驱动轮200转动,进而带动小车运行,动力模块3包括电源、电源稳压模块、减速驱动电机和电机驱动模块,电机驱动模块用以连接单片机,可控制电机进行调速、运行、停止、步进、匀速的指令,当需要运输包裹时,将小车开至包裹处,先转动转动台4,带动机械臂件5转动至与包裹相对应处,通过吸盘式包裹识别吸附组件6先对包裹进行识别,识别完毕后将包裹吸附到吸盘式包裹识别吸附组件6上,将转动台4转动,使得吸盘式包裹识别吸附组件6以及包裹转动至包裹托盘7上方,将包裹装载于包裹托盘7上,再启动小车,将位于包裹托盘7上的包裹卸载到分拣区,完成自主装载、识别以及卸载包裹,占用空间小且可适用不同重量以及大小的纸箱包裹,且不会对纸箱造成破坏以及货物损伤,装载卸载包裹稳定,智能化程度和运输效率较高。
[0027]
结合图1、图2所示,所述的车顶板2上设有两个沿车顶板2 中心线对称的托盘连接板8,所述的包裹托盘7与托盘连接板8 通过转轴连接,所述的包裹托盘7下方设有托盘摆杆件9,所述的托盘摆杆件9与包裹托盘7相连。
[0028]
具体地说,托盘连接板8用于连接包裹托盘7,当需要将包裹托盘7上的包裹卸载在分拣区时,通过转动托盘摆杆件9,带动包裹托盘7翻转,将位于包裹托盘7内的包裹自动卸载在分拣区内,卸载效率较高,无需再次使用吸盘式包裹识别吸附组件6 进行吸附卸载。
[0029]
结合图1、图2所示,所述的吸盘式包裹识别吸附组件6包括设置于机械臂件5上的吸盘固定板10,所述的吸盘固定板10 底部设有若干沿吸盘固定板10中心线对称的包裹吸盘11,所述的吸盘固定板10上设有包裹识别器12。
[0030]
本实施例中,吸盘固定板10用以固定包裹吸盘11,在通过包裹吸盘11吸附固定包裹时,先通过包裹识别器12对包裹上的物流信息进行识别,从而判断包裹的分拣目的地,然后再将包裹运送到相应的分拣集中区,包裹识别器12为条形码扫描识别模块。
[0031]
所述的机械臂件5远离转动台4一端设有吸附前端总成块 13,所述的吸盘固定板10和包裹识别器12分别与吸附前端总成块13固定连接,所述的包裹识别器12为包裹扫码器。
[0032]
本实施例中,吸附前端总成块13用以固定吸盘固定板10和包裹识别器12,包裹识别器12为包裹扫码器,本领域技术人员应当理解,包裹识别器12采用市售的gm65嵌入式条形码(二维码)识读模块,它针对纸质条码及显示屏上的条码都可以轻松扫描,该模块是在图像智能识别算法及在此基础上开发出先进的条码解码算法,可以非常容易且准确地识读
条码符号,并且它支持读取国际标准的所有条形码类型。
[0033]
结合图1所示,所述的包裹识别器12的水平高度高于包裹吸盘11的水平高度,所述的车底板1上设有气泵14,所述的气泵 14与包裹吸盘11相连。
[0034]
本实施例中,包裹识别器12的水平高度高于包裹吸盘11的水平高度,确保在使用包裹吸盘11时,包裹识别器12不会与包裹发生碰撞,互不干涉,当需要抓取包裹时,启动气泵14吸气,使得包裹吸盘11内部形成负压,将包裹牢牢抓获。
[0035]
所述的车顶板2上设有转台固定架15,所述的转动台4位于转台固定架15内且转动台4与转台固定架15转动配合,所述的车顶板2上还设有周向转动器16,所述的周向转动器16的转动轴与转动台4相连。
[0036]
本实施例中,转台固定架15用以安装转动台4且方便转动台 4转动,当需要转动转动台4时,启动周向转动器16,通过周向转动器16的转动轴带动转动台4转动,本领域技术人员应当理解,周向转动器16可以是电机或者旋转油缸。
[0037]
所述的转动台4与转台固定架15之间设有轴承17,所述的轴承17为滚珠轴承,所述的周向转动器16的转动轴贯穿通过轴承17。
[0038]
本实施例中,轴承17用以承受径向载荷以及轴向载荷,负责支撑转动台4,并提高周向转动器16的转动轴的传动精度以及使用寿命。
[0039]
结合图1所示,所述的机械臂件5包括设置于转动台4顶部的大转臂18,所述的大转臂18远离转动台4一端设有中转臂19,所述的中转臂19远离大转臂18一端设有小转臂20,所述的吸附前端总成块13与小转臂20相连,所述的小转臂20前端设有y 叉架201,所示的吸附前端总成块13位于y叉架201内。
[0040]
本实施例中,大转臂18、中转臂19和小转臂20之间的连接处设有金属舵机,通过金属舵机同轴连接来独立自主的控制大转臂18、中转臂19和小转臂20,达到机械臂调节灵活方便的目的,本领域技术人员应当理解,金属舵机采用市售的ld-27mg单轴数字舵机,它的最大扭力可达20kg,最大转动角有270
°
,满足机械臂的工作运转需求,吸附前端总成块13以及包裹识别器12朝向始终向下。
[0041]
结合图1、图2所示,所述的车顶板2上设有驱动安装架21,所述的驱动安装架21上设有金属舵机22,所述的金属舵机22的转动轴与托盘摆杆件9相连,所述的托盘摆杆件9包括设置于车顶板2上的连杆23和摇杆24,所述的连杆23与金属舵机22的转动轴相连,所述的摇杆24与包裹托盘7相连。
[0042]
本实施例中,驱动安装架21用以安装固定金属舵机22,当需要翻转包裹托盘7时,启动金属舵机22,通过金属舵机22的转动轴带动连杆23和摇杆24摆动,进而带动包裹托盘7翻转,实现对包裹的卸载,本领域技术人员应当理解,金属舵机22可采用达盛舵机公司所市售生产的型号为ds3218数码舵机。
[0043]
结合图1、图3所示,所述的车顶板2上还设有托盘承托块 25,所述的托盘承托块25与包裹托盘7相抵接配合,,所述的车底板1底部设有五路循迹板202和若干沿车底板1中心线对称的侧循迹板203,所述的包裹托盘7呈方抖状,避免在小车移动过程中,位于包裹托盘7内的包裹从包裹托盘7内滑出,托盘承托块25可保证在装载包裹时,包裹托盘7保持水平状态,不会发生角度倾斜,五路循迹板202和侧循迹板203为型号是tcrt5000 光电传感器,它是由一个高发射功率的红外光电二极管与一个高灵敏度的光电晶体管这两个主要部件组
成,传感器工作时,红外发射二极管不停的向外发射红外线,当发射出去的红外线没有被物体反射回来或被反射回来但强度很低时,红外接收管就会一直处于关断状态,这时候模块的输出端为低电平,工作指示灯一直处于熄灭状态;当被检测物体出现在检测范围内时,红外线被反射回来并且强度足够大,红外接收管饱和,这时候模块的输出端为高电平,工作指示灯被点亮。通过运用循迹传感器对黑白色差会产生不同的电平从而输出不同的信号,来控制小车电机的旋转方向,继而就可以控制小车沿着黑色引导线循迹行走,实现自动化循迹移动。
[0044]
本发明的工作原理是:
[0045]
当需要运输包裹时,将小车开至包裹处,先转动转动台4,带动机械臂件5转动至与包裹相对应处,吸盘固定板10用以固定包裹吸盘11,在通过包裹吸盘11吸附固定包裹时,先通过包裹识别器12对包裹上的物流信息进行识别,从而判断包裹的分拣目的地,然后再将包裹运送到相应的分拣集中区,包裹识别器12 为条形码扫描识别模块,包裹识别器12的水平高度高于包裹吸盘 11的水平高度,确保在使用包裹吸盘11时,包裹识别器12不会与包裹发生碰撞,互不干涉,当需要抓取包裹时,启动气泵14 吸气,使得包裹吸盘11内部形成负压,将包裹牢牢抓获。
[0046]
抓获包裹完成后,将转动台4转动,使得包裹吸盘11以及包裹转动至包裹托盘7上方,将包裹装载于包裹托盘7上,再启动小车,将位于包裹托盘7上的包裹卸载到分拣区,启动金属舵机 22,通过金属舵机22的转动轴带动连杆23和摇杆24摆动,进而带动包裹托盘7翻转,实现对包裹的卸载,完成自主装载、识别以及卸载包裹,占用空间小且可适用不同重量以及大小的纸箱包裹,且不会对纸箱造成破坏以及货物损伤,装载卸载包裹稳定,智能化程度和运输效率较高。
[0047]
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神。
[0048]
尽管本文较多地使用车底板1、车顶板2、驱动轮200、y叉架201、五路循迹板202、侧循迹板203、动力模块3、转动台4、机械臂件5、吸盘式包裹识别吸附组件6、包裹托盘7、托盘连接板8、托盘摆杆件9、吸盘固定板10、包裹吸盘11、包裹识别器 12、吸附前端总成块13气泵14、转台固定架15、周向转动器16、轴承17、大转臂18、中转臂19、小转臂20、驱动安装架21、金属舵机22、连杆23、摇杆24、托盘承托块25等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本发明的本质,把它们解释成任何一种附加的限制都是与本发明精神相违背的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1