电梯安全系统的制作方法
1.该公开内容涉及电梯安全系统,且涉及操作电梯安全系统的方法。
背景技术:
2.电梯系统大体上包括在多个层站之间井道内移动的电梯轿厢。电梯轿厢由设置在井道中的轨道引导,且安全方面(包括制动器)设置在电梯导轨附近。
3.典型地位于电梯轿厢和/或对重上的电梯安全制动器(也称为安全装置)在触发时夹到电梯轨道上,以使电梯轿厢和/或对重保持在适当位置。
4.已知安全是电梯系统内的首要问题,尤其是在发生紧急情况时,且例如在绳断裂的情况下,需要使电梯轿厢立即并安全地停止。确定何时需要使电梯轿厢停止大体上基于确定轿厢何时以超速运行。
5.已知电梯系统在电梯轿厢上包括速度传感器以监测电梯轿厢的速度,且将该速度与对于已知电梯轿厢移动(例如,对于在指定楼层之间的行进)的预期速度曲线比较。关于预先限定的超速阈值,电梯控制系统(在一些实施例中,连续地)监测电梯轿厢的速度,且如果电梯轿厢的速度高于超速阈值,它判定速度异常且控制系统应用紧急制动设备。
技术实现要素:
6.根据该公开内容的第一方面,提供一种用于电梯系统的电梯安全系统,该电梯安全系统包括:位置参考系统,该位置参考系统配置成用于确定在电梯系统内的电梯轿厢的当前位置;至少一个制动器,该至少一个制动器构造成使电梯轿厢安全停止;控制器,该控制器配置成触发至少一个制动器;其中控制器配置成:从位置参考系统接收数据;从电梯轿厢的当前位置计算当前加速度;将当前加速度与预定加速度阈值比较;以及在当前加速度超过预定加速度阈值时,触发至少一个制动器。
7.控制器可为单独的轿厢上控制器,其配置成用作用于电梯安全系统的控制器或与主控制器组合作用。
8.电梯安全系统可包括轿厢上控制器和/或远离电梯轿厢设置的电梯系统控制器。控制器可包括远离电梯轿厢设置的电梯系统控制器。
9.预定加速度阈值可为预定加速度阈的值。预定加速度阈值可在8
‑
9.8 m/s2的范围内。预定加速度阈值可在8.5
‑
9.5 m/s2的范围内。预定加速度阈值可为9 m/s2。预定加速度阈值可小于8 m/s2或大于9.8 m/s2。
10.预定加速度阈值可呈在第一层站与第二层站之间的预期加速度的曲线的形式。控制器还可配置成将当前加速度与预定加速度阈值曲线比较。预定加速度阈值曲线可包括第一加速度区域、第二零加速度(恒定速度)区域以及第三减速度区域。
11.最大的预定加速度阈值可在8
‑
9.8 m/s2的范围内。最大的预定加速度阈值可在8.5
‑
9.5 m/s2的范围内。最大的预定加速度阈值可为9 m/s2。最大的预定加速度阈值可小于8 m/s2或大于9.8 m/s2。
12.位置参考系统可为配置成测量电梯轿厢的当前位置的任何合适的系统。
13.位置参考系统可包括具有设在电梯轿厢上的至少一个位置参考检测器的位置参考系统。位置参考系统可具有设在电梯系统的井道内的一个或多个对应元件。
14.位置参考系统可包括绝对位置参考系统。位置参考系统可配置成通过读取设在井道内的编码信息来检测当前位置。位置参考系统可包括设在电梯轿厢上的绝对位置参考检测器。绝对位置参考系统可具有设在电梯系统的井道内的一个或多个对应元件。位置参考检测器可为相机。对应元件可为设在井道的侧壁上的编码带。编码带可包括沿带的长度嵌入的可为物理、光学或磁性的标志或材料。备选地,对应元件可包括沿井道壁设置的多个标记,例如物理、光学或磁性标志或材料。
15.绝对位置参考系统可具有以预定的水平和/或竖直偏移放置在壳体内的多个绝对位置参考检测器。
16.位置参考系统可配置成扫描设在编码带上的标记,且向控制器提供指示轿厢位置的数据。
17.位置参考系统可包括增量位置参考系统。位置参考系统可配置成通过测量相对于已知位置的移动来检测当前位置。
18.位置参考系统可为光学系统。绝对位置参考系统可包括一个或多个相机。位置参考系统可为磁性系统。
19.位置参考系统可配置成使用相对大气压来确定当前位置。位置参考系统可包括设在电梯轿厢上的大气压传感器,以及设在井道内的已知位置处的参考大气压。位置参考系统可配置成将电梯轿厢的当前大气压与井道内的已知位置处的参考大气压比较。
20.控制器可配置成从电梯轿厢的当前位置计算当前速度。控制器可配置成将当前速度与预定速度阈值比较。控制器可配置成在当前速度超过预定速度阈值时触发至少一个制动器。
21.控制器还可配置成将当前速度与预定速度阈值曲线比较。速度阈值曲线可包括带有增大速度的第一区域、第二恒定速度区域和带有减小速度的第三区域。
22.根据另外的方面,提供一种电梯系统,该电梯系统包括:井道,该井道在多个层站之间延伸;电梯轿厢,该电梯轿厢构造成用于在多个层站之间沿井道移动;以及如上文描述的电梯安全系统。
23.根据另外的方面,提供一种用于操作电梯安全系统的方法,该方法包括:从位置参考系统接收与电梯轿厢的当前位置相关联的连续位置数据;从连续位置数据计算与电梯轿厢相关联的当前加速度;将当前加速度与预定加速度阈值比较;在当前加速度超过预定加速度阈值时触发至少一个制动器。
24.预定加速度阈值可为预定加速度阈的值。预定加速度阈值可在8
‑
9.8 m/s2的范围内。预定加速度阈值可在8.5
‑
9.5 m/s2的范围内。预定加速度阈值可为9 m/s2。
25.方法可包括将当前加速度与预定加速度阈值曲线比较。预定加速度阈值曲线可包括第一加速度区域、第二零加速度(恒定速度)区域以及第三减速度区域。
26.绝对位置参考系统可包括设在电梯轿厢上的绝对位置参考检测器和设在电梯系统的井道内的一个或多个对应元件。
27.位置参考系统可包括设在电梯轿厢上的位置参考检测器和设在电梯系统的井道
内的一个或多个对应元件。位置参考检测器可为相机,且对应元件可为设在井道的侧壁上的编码带。位置参考检测器可配置成扫描设在编码带上的标记,且向控制器提供指示轿厢位置的数据。编码带可包括沿带的长度嵌入的物理、光学或磁性标志或材料。对应元件可包括沿井道壁设置的多个标记,例如物理、光学或磁性标志或材料。
28.位置参考系统可为光学系统。位置参考系统可为磁性系统。
29.确定当前位置的步骤可包括扫描设在编码带上的标记,以及向控制器提供指示轿厢位置的数据。
30.确定当前位置的步骤可包括增量位置参考系统。确定当前位置的步骤通过测量相对于已知位置的移动来检测当前位置。
31.确定当前位置的步骤可包括使用相对大气压。确定当前位置的步骤可包括将电梯轿厢的当前大气压与井道内的已知位置处的参考大气压比较。
32.方法可包括从电梯轿厢的当前位置计算当前速度。方法可包括将当前速度与预定速度阈值比较。方法可包括在当前速度超过预定速度阈值时触发至少一个制动器。
33.预定速度阈值可为预定速度阈的值。控制器还可配置成将当前速度与预定速度阈值曲线比较。速度阈值曲线可包括带有增大速度的第一区域、第二恒定速度区域和带有减小速度的第三区域。
34.上文描述的系统和方法提供一种经济的解决方案,其可容易改造到现有的电梯系统中。
附图说明
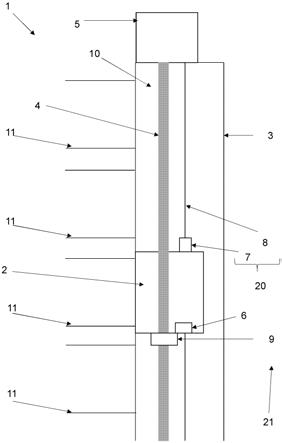
35.现在将参照附图仅通过示例来描述该公开内容的某些优选示例,附图中:图1是可采用本公开内容的各种实施例的电梯系统的示意图;图2示出根据本公开内容的实施例的电梯安全系统的示意图;以及图3是根据本公开内容的实施例的用于操作电梯安全系统的方法的流程图;图4a示出关于图1的电梯系统的加速度的示例阈值曲线;图4b示出关于图1的电梯系统的速度的示例阈值曲线;以及图5是根据本公开内容的实施例的用于操作电梯安全系统的方法的流程图。
具体实施方式
36.图1是电梯系统1的示意图,该电梯系统1包括电梯轿厢2、具有侧壁10的井道3、导轨4、机房5、控制器6、位置参考系统20、制动器9(也称为安全制动器)和多个层站11。
37.虽然图1中仅示出一个制动器9和一个导轨4,将了解的是,导轨4典型地设置在井道3的两侧上,且制动器9设置在电梯轿厢2的每侧上(两个制动器9通常称为“安全装置”)。电梯轿厢2由设置在井道3的侧壁10上的导轨4引导。在一个实施例中,可仅有单个导轨4。在一个实施例中,可有三个或更多个导轨4。制动器9附接到导轨4和电梯轿厢2的底部。控制器6是设在电梯轿厢2上的安全pcb(印刷电路板),且配置成应用制动器9。
38.在另一示例(未示出)中,控制器6可为电梯控制器,该电梯控制器配置成控制电梯系统1,包括但不限于使电梯轿厢2在多个层站11之间移动以及控制制动器9。电梯控制器可位于机房5中或电梯系统1内或附近的任何合适位置中。电梯控制器6可定位在多种位置中,
诸如但不限于无线控制器,以及在不带有机房的电梯系统中。在一个实施例中,电梯控制器可远离电梯系统1定位或在云中。
39.位置参考系统20配置成确定在井道3内的电梯轿厢2的当前位置。在图1的示例中的位置参考系统20包括具有绝对位置参考检测器7的绝对位置参考系统20,以及位于井道3的侧壁10中的一个上的井道构件8。绝对位置参考检测器7附接到电梯轿厢2,且配置成与井道构件8相互作用以确定电梯轿厢2的当前位置。
40.来自绝对位置参考检测器7的位置数据发送到控制器6。控制器6可基于绝对位置参考检测器7的输出来进行判定,诸如何时应用制动器9来使电梯轿厢2安全停止,由于紧急情况或为将电梯轿厢2停止在多个层站11中的一个处。
41.电梯安全系统21包括绝对位置参考系统20、控制器6和制动器9。
42.现在参照图2,图2示出图1的电梯安全系统21,其中简化描绘电梯轿厢2和位置参考系统20(其在该示例中是光学系统)。大体上,光学位置参考系统20包括编码带或条作为安装在井道3内的井道构件8,其沿所述井道3的长度延伸。带/条8包括在带/条8上的标记,其用于识别沿井道3的竖直间隔的位置。绝对位置参考检测器7是光学传感器7,该光学传感器7安装在电梯轿厢2上,且配置成用于光学读取包含于带/条上的位置相关标记。
43.在该示例中,控制器6包括轿厢上控制器6a和电梯系统控制器6b。
44.在该示例中,绝对位置参考检测器7是相机7,且井道构件8是编码带8。相机7从编码带8读取数据。相机7设在壳体7a中,该壳体7a位于电梯轿厢2的顶部2a上,与侧壁10相邻,且在距编码带8(其位于井道3的侧壁10上)距离
‘
d’处。相机7读取由视角12描绘的编码带8的设定比例。相机7扫描编码带8,该编码带8提供指示轿厢沿带8的位置的数据。
45.在该示例中,绝对位置参考检测器7设置在电梯轿厢2的顶板2a上,但将了解的是,它可设置在电梯轿厢2上其中它不干扰其它系统且横跨视角12对编码带8没有中断的任何位置。
46.在另一示例(未示出)中,两个绝对位置参考检测器7以竖直间隔开的对准来固定到电梯轿厢2,且布置成同时读取两个竖直分离的编码轨道区段8,以获得一系列的位置相关信息。
47.在另一示例(未示出)中,绝对位置参考系统20具有以预定的水平和/或竖直偏移放置在壳体内的多个绝对位置参考检测器7。这引入冗余,其中可补偿来自一个绝对位置参考检测器7的数据的损失。
48.绝对位置参考检测器7连续地监测电梯轿厢2相对于时间的当前位置。来自绝对位置参考检测器7的数据然后传送到控制器6。用该数据,控制器6考虑到任何电梯呼叫请求来判定何时需要停止电梯轿厢2。在正常操作期间,电梯轿厢2根据当前的电梯呼叫请求从第一层站11至目的地层站11之间行进。电梯轿厢2在第一层站11处开始移动,电梯轿厢2然后加速至正常操作速度,它保持处于该正常操作速度直到所限定位置处,在该处它减速以允许电梯轿厢2停止在目的地层站11处。关于电梯轿厢2在它于层站11之间移动时的加速度和速度的曲线是针对特定的电梯轿厢行程所预先限定的,且为控制器6所已知。
49.将了解的是,虽然上文描述光学绝对位置参考系统,可使用配置成从永远不可改变的坐标原点确定位置的任何合适系统。
50.另一已知的位置参考系统20是配置成从已知位置计数小步长的增量位置参考系
统。该类型的系统使用横跨井道的参考点来避免漂移。例如,增量位置参考系统可包括安装在电梯驱动马达的驱动轴上的编码器,且本领域技术人员可将其称为增量位置参考系统。电梯轿厢2的位置数据由编码器确定。额外的传感器和视准器(vane)可设在每个层站1处,且每次电梯轿厢2经过层站11处的视准器时,如果需要,检验和校正如由编码器所得出的电梯轿厢2的位置。
51.图3是概括判定何时要应用紧急制动的方法的示例的流程图。控制器6从位置参考检测器7获得相对于时间的位置数据(步骤100)。使用该数据,控制器6可计算电梯轿厢2的当前加速度a(步骤101)。
52.在步骤102中,将当前加速度a与预定加速度阈值at(例如,预定加速度阈值)比较。当前加速度应始终低于预定加速度阈值at。在当前加速度a低于预定加速度阈值at时,电梯系统1的正常操作可继续进行。如果在电梯轿厢行程期间的任何点处加速度超过预定加速度阈值at,控制器6确定关于电梯系统1有某物出错。在该时间点处,应用制动器9来使电梯轿厢2安全停止,保持电梯轿厢2中的乘客安全(步骤103)。
53.在该示例中,预定加速度阈值at是最大阈值。预定加速度阈值可在8
‑
9.8 m/s2的范围内。预定加速度阈值可在8.5
‑
9.5 m/s2的范围内。预定加速度阈值可为9 m/s2。
54.预定加速度阈值at还可呈多个层站11之间的预期加速度的曲线的形式。在加速度阈值是曲线的情况下,它对于给定的电梯轿厢行程在电梯轿厢2的移动曲线内的不同位置处将不同。在移动的不同部分处,关于加速度的在预期加速度曲线之上的可允许公差可不同,特别是在加速度上的增大可能更危险的情况下,例如当电梯轿厢2应减速至在目的地层站11旁边停止时。在该情况下,对于给定的电梯轿厢行程(例如向下以所限定距离移动),将当前加速度a与关于加速度的已知曲线比较。
55.图4a示出关于在层站11之间移动的电梯轿厢2的加速度的示例阈值曲线。沿竖直轴线表示加速度,且沿水平轴线表示行程时间。在区域(a)中在运动的开始,电梯轿厢2加速,然后在区域(b)中它以恒定速度移动,之后在区域(c)中当它接近它的目的地时减速。在步骤102中,在行程期间,控制器6将当前加速度a与加速度曲线比较。在任何区域中,如果当前加速度超过对于该区域的阈值,控制器6应用制动器9来执行紧急停止。例如,在区域(b)中,预期电梯轿厢2将以恒定速度行进,换句话说,将没有加速度。如果在区域(b)中电梯轿厢经历非预期的加速,这可指示安全关键问题,诸如绳失效。
56.图4b示出关于在层站22之间移动的电梯轿厢2的速度的示例阈值曲线。沿竖直轴线表示速度,且沿水平轴线表示行程时间。这用于下文描述的示例中。
57.图5示出判定何时应用紧急制动的方法的另外示例的实施例。在图5的示例中,监测电梯轿厢2的当前速度和当前加速度两者。控制器6从绝对位置参考检测器7获得与电梯轿厢2的当前位置相关的连续位置数据(步骤200)。使用该数据,控制器6可连续地计算电梯轿厢2的当前速度s(步骤201)和电梯轿厢2的当前加速度a(步骤202)。将当前加速度a与预定加速度阈值at比较。将当前速度s与预定速度阈值st比较。当前加速度a应始终保持低于关于加速度的预定阈值at(步骤203)。当前速度s也应保持低于关于速度的预定阈值st(步骤204)。在电梯轿厢2的当前加速度a(步骤203)和当前速度s(步骤204)低于相应的预定阈值时,电梯系统1的正常操作可继续进行。
58.如果当前加速度a超过预定加速度阈值at,应用制动器9(步骤205)。该检验允许控
制器6即使在仍未达到最大速度时识别潜在危险的情况。例如,如果构件失效,电梯轿厢2可在自由下落的状态下非常快速地加速。通过快速检测异常加速度,可迅速地应用制动器9。
59.如果当前加速度a仍低于预定加速度阈值at,但出于任何原因当前速度s高于预定速度阈值st,应用制动器9(步骤205)。
60.在该示例中,预定阈值是设定阈值。然而,将了解的是,如图4a中示出的,预定加速度阈值还可呈预期加速度的曲线的形式,且如图4b中示出的,预定速度阈值还可呈在多个层站11之间的预期速度的曲线的形式。
61.在该情况下,将当前加速度a与关于电梯轿厢2在其行程期间的当前位置处的加速度的已知曲线比较(步骤203)。将当前速度s与关于在第一层站与目的地层站11之间运行的当前电梯轿厢2的特定位置处的速度的已知曲线比较(步骤204)。当前加速度a应始终保持低于关于加速度的预定阈值at(步骤203)。当前速度s也应保持低于预定速度阈值st(步骤204)。在电梯轿厢2的当前加速度a(步骤203)和当前速度s(步骤204)低于相应的预定阈值at和st时,电梯系统的正常操作可继续进行。
62.虽然在图3和图5中这些方法步骤视为彼此接连进行,将了解的是,每个步骤可在处理器内连续发生,允许几乎即时地响应于加速度或速度在给定阈值外的任何改变。在电梯系统中,预期响应时间为0
‑
100 ms,其中100 ms之上的延迟对安全地响应于紧急停止情况是不够快速的。
63.在这些示例中,阈值用来确定何时应用制动器来使电梯轿厢安全停止。在额外的示例(未示出)中,速度和加速度的连续监测可用于诊断目的。
64.将由本领域技术人员了解的是,本公开内容通过描述其一个或多个特定方面来示出,但本公开内容不限于这些方面;在所附权利要求书的范围内,许多变化和修改是可能的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1