一种加气板的多模垛架的顶杆自动支护系统的制作方法
[0001]
本实用新型涉及蒸压加气混凝土建材自动生产技术领域,具体涉及一种加气板的多模垛架的顶杆自动支护系统。
背景技术:
[0002]
蒸压加气混凝土板(简称加气板、aac板)作为一种组合装配式的建筑材料,因其经济、方便施工且生产环保的特性而在国内受到了广泛的推广及应用,其通过将由水泥、石灰、硅砂等原料进行充分混合成浆后再倒入放置有钢筋网片的小车中进行浇筑成型,并对其进行切割,进一步对切割处理后的加压板进行蒸养操作;目前的蒸养都是直接将多个单位浇筑模具车内成型的加压板件转移到摆渡车上方依次逐个放入蒸养釜中进行蒸养,但为了保证产品质量,模具车的大小不会设计得过大,而蒸养釜的内径相对成型产品则会大很多,这使得在蒸养釜上方存有大量的空闲空间无法得到利用;而想要直接提高蒸养釜的蒸养效率,将摆渡车提前进行堆垛是一个很好的方法,但考虑到如果通过人工进行堆垛操作则会极大地增加工作人员的负担,且若是需要堆叠较高成型产品的情况下,还容易出现安全风险,故而一种能够对多个成型模的堆垛装置是目前所急需的。
技术实现要素:
[0003]
本实用新型所要解决的技术问题是:提供一种加气板的多模垛架的顶杆自动支护系统,以解决当前针对加气板进行堆垛过程中自动化程度较低,消化人力资源多,不能满足大批量生产需求的问题。
[0004]
为解决上述问题,本实用新型提供了如下技术方案:
[0005]
一种加气板的多模垛架的顶杆自动支护系统,它包括固定在地面上的轨道;在轨道上安装有若干对滚轮;且在滚轮的端部均设置有驱动电机;活动底座通过滚轮可移动地安装在轨道上;
[0006]
在活动底座的顶部开有两个以上沿竖直方向开设的定位孔,且在活动底座相背的两个侧端面上分别可拆卸地安装有支杆;支杆的端部尺寸与定位孔的大小相配合;在活动底座的底部还设置有导向孔;
[0007]
在轨道的正上方设置有吊机;所述吊机的吊钩与所述导向孔相匹配;
[0008]
在轨道的两侧设置有底架;且在底架上沿指向轨道的方向设置有导向轨;活动机架通过所述导向轨可移动地安装在底架上;在活动机架与底架之间设置有第一驱动装置;在活动机架上靠近轨道的一侧安装有沿竖直方向设置的滑轨;机械臂可移动地安装在所述滑轨上,且机械臂与活动机架通过第二驱动装置相连;
[0009]
机械臂包括与滑轨相配合的滑动板;在滑动板上安装有传动转轴;传动转轴的轴线平行于轨道所在平面,且传动转轴的输入端与第三驱动装置相连,输出端与夹持装置相连接;在夹持装置上安装有控制夹持装置活动的气缸;所述夹持装置与支杆相配合使用。
[0010]
优选的,还包括控制器;控制器对驱动电机、吊机、第一驱动装置、第二驱动装置、
第三驱动装置及气缸进行控制;底架的尾部与轨道的尾部相平齐。
[0011]
优选的,活动底座包括承压座;在承压座的左右侧端分别设置有活动侧板;定位孔、支杆和导向孔均设置在活动侧板上;承压座为一栅格状平板结构。
[0012]
进一步的,在两个活动侧板之间还固定有若干个连接柱;在连接柱的上顶部设置有若干个梳齿状插条;承压座放置在连接柱上方,且通过插条进行限位安装。
[0013]
优选的,支杆为两端成锥台状结构的直杆;在所述直杆上靠近两端锥台的位置分别设置有台阶卡块,所述台阶卡块的尺寸大于定位孔的大小。
[0014]
进一步的,夹持装置包括与传动转轴相连接的悬臂连杆;在悬臂连杆的端部安装有功能台;在功能台前端面的上下侧分别设置有相对的外延板;在两个外延板之间还安装有导向轴;在导向轴上设置有可沿导向轴的轴向进行移动的压板;气缸的安装在外延板上,且气缸的输出端固定在压板上。
[0015]
进一步的,导向轴的数目共有两个,且分别设置在外延板的左右两侧;气缸设置在外延板的中部位置。
[0016]
优选的,压板共有两个,且两个压板沿竖直方向相对设置;在压板上设置有加强凸台;导向轴穿过所述加强凸台进行设置,且在压板的中部还开有配合气缸输出端使用的安装孔;气缸的输出端与压板为可拆卸连接。
[0017]
优选的,底架为一个m字结构的底架,导向轨对应设置在底架的两侧;活动机架则为一个带有加强筋的l型直立排架结构;第一驱动装置包括固定在活动机架上的电机,电机通过传动轴与设置在活动机架两侧的滚轮相连接,滚轮的尺寸与导向轨的大小相匹配;第二驱动装置包括设置在活动机架上顶部的电机,电机通过转轴与活动机架上顶部两侧的链轮相连接,在活动机架的下底部同样装有链轮,且链条的中部绕过两个链轮设置,链条的两端分别设置在机械臂的上下两侧。
[0018]
本实用新型有益效果:
[0019]
本实用新型基于现有用于支撑加压板的活动底座的结构设计了一套能够完成多个动作的支护系统,首先使用带有滚轮的轨道以辅助活动底座的行进,然后利用底架及对应驱动装置来带动活动机架,使其能够实现靠近及远离活动底座,通过活动机架上的驱动装置来带动机械臂的升降,进一步设计了一套具有能够进行旋转和夹持两项自由度的机械臂及夹持装置,使该系统能够完成将放在活动底座上的支杆取下、转正、对位,安装的系列操作,最后利用吊机通过活动底座上的导向孔吊起再放到前一个已经完成支杆安装的活动底座上,其结构简单,操作方便迅速,对大规模生产加压板具有良好的效果。
附图说明
[0020]
图1是本实施例中轨道与活动底座的进行配合的结构示意图;
[0021]
图2是本实施例中活动底座的爆炸示意图;
[0022]
图3是本实施例中轨道、底架、活动机架及机械臂的装配位置示意图;
[0023]
图4是本实施例中底架、活动机架及机械臂的三维装配示意图;
[0024]
图5是本实施例中机械臂及夹持装置的结构示意图
[0025]
图6是图5的左视图;
[0026]
图7是图5的俯视图;
[0027]
图8是本实施例中功能台背部的结构示意图;
[0028]
图9是本实施例中支杆2b的结构示意图;
[0029]
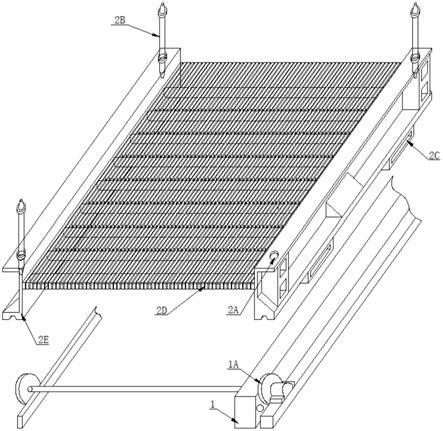
图10是本实施例中活动底座与支杆配合及安装放置的结构示意图;
[0030]
图11是本实施例中控制器与各个电器控制元件的连接示意图;
[0031]
附图标记说明:1、轨道,1a、滚轮,2、活动底座,2a、定位孔,2b、支杆,2c、导向孔,2d、承压座,2e、活动侧板,2f、连接柱,2g、插条,3、底架,3a、导向轨,4、活动机架,4a、滑轨,5、机械臂,5a、滑动板,5b、传动转轴,5c、第三驱动装置,6、夹持装置,6a、气缸,6b、悬臂连杆,6c、功能台,6d、外延板,6e、导向轴,6f、压板,7、第二驱动装置,8、控制器, 9、第一驱动装置。
具体实施方式
[0032]
下面结合附图及具体的实施例对本实用新型进行进一步介绍:
[0033]
实施例:
[0034]
参照图1至图11,本实施例提供一种加气板的多模垛架的顶杆自动支护系统,它包括固定在地面上的轨道1;在轨道1上安装有若干对滚轮1a;且在滚轮1a的端部均设置有驱动电机;活动底座2通过滚轮1a可移动地安装在轨道1上;可具体参考图1和图2,在活动底座2两侧开有与滚轮1a相配合的通槽结构,活动底座2在放置到轨道上后即通过通槽与滚轮1a之间的配合由滚轮1a的转动来进行其进行移动。
[0035]
在活动底座2的顶部开有两个以上沿竖直方向开设的定位孔2a,且在活动底座2相背的两个侧端面上分别可拆卸地安装有支杆2b;支杆2b的端部尺寸与定位孔2a的大小相配合;在活动底座2的底部还设置有导向孔2c;
[0036]
活动底座2包括承压座2d;在承压座2d的左右侧端分别设置有活动侧板2e;定位孔2a、支杆2b和导向孔2c均设置在活动侧板2e上;承压座2d为一栅格状平板结构。
[0037]
在两个活动侧板2e之间还固定有若干个连接柱2f;在连接柱2f的上顶部设置有若干个梳齿状插条2g;承压座2d放置在连接柱2f上方,且通过插条2g进行限位安装。
[0038]
支杆2b为两端成锥台状结构的直杆;在所述直杆上靠近两端锥台的位置分别设置有台阶卡块,所述台阶卡块的尺寸大于定位孔2a的大小。本实施例中,支杆2b的结构具体可参考图9所示,其顶部锥台的长度小于底部锥台的长度,在具体对两个活动底座2安装的时候,底部锥台插入位于下方活动底座的定位孔中,顶部锥台插入位于上方活动底座的定位孔中。
[0039]
在轨道1的正上方设置有吊机;所述吊机的吊钩与所述导向孔2c相匹配;本实施例中吊机的吊钩对应导向孔2c设置有四个,可以在起吊带有成型产品的活动底座之后将其放入另一个活动底座上方。
[0040]
可参考图3和图4,在轨道1的两侧设置有底架3;且在底架3上沿指向轨道的方向设置有导向轨3a;活动机架4通过所述导向轨3a可移动地安装在底架3上;在活动机架4与底架3之间设置有第一驱动装置9;在活动机架4上靠近轨道1的一侧安装有沿竖直方向设置的滑轨4a;机械臂5可移动地安装在所述滑轨4a上,且机械臂5与活动机架4通过第二驱动装置7相连;本实施例中,底架3为一个m字结构的底架,导向轨3a对应设置在底架的两侧;活动机架4则为一个带有加强筋的l型直立排架结构;第一驱动装置9包括固定在活动机架4上的电
机,电机通过传动轴与设置在活动机架两侧的滚轮相连接,滚轮的尺寸与导向轨3a的大小相匹配;活动机架4即通过电机带动传动轴并进一步带动滚轮进行转动从而实现在底架3上的沿导向轨3a的前后移动;第二驱动装置7包括设置在活动机架4上顶部的电机,电机通过转轴与活动机架4上顶部两侧的链轮相连接,在活动机架的下底部同样装有链轮,且链条的中部绕过两个链轮设置,链条的两端分别设置在机械臂5的上下两侧,其通过电机转动来带动链轮转动,从而使链条带动机械臂在活动机架4上的上下移动,且机械臂5的同时还受到与滑轨4a相配合的约束以防止其产生晃动;
[0041]
具体可参考图5到图7,机械臂5包括与滑轨4a相配合的滑动板5a;在滑动板5a上安装有传动转轴5b;传动转轴5b的轴线平行于轨道1所在平面,且传动转轴5b的输入端与第三驱动装置5c相连,输出端与夹持装置6相连接;在夹持装置6上安装有控制夹持装置6活动的气缸6a;所述夹持装置6与支杆2b相配合使用。
[0042]
夹持装置6包括与传动转轴5b相连接的悬臂连杆6b;在悬臂连杆6b的端部安装有功能台6c;在功能台6c前端面的上下侧分别设置有相对的外延板6d;在两个外延板6d之间还安装有导向轴6e;在导向轴6e上设置有可沿导向轴6e的轴向进行移动的压板6f;气缸6a的安装在外延板6d上,且气缸6a的输出端固定在压板6f上。
[0043]
导向轴6e的数目共有两个,且分别设置在外延板6d的左右两侧;气缸6a设置在外延板6d的中部位置。
[0044]
压板6f共有两个,且两个压板6f沿竖直方向相对设置;在压板6f上设置有加强凸台6g;导向轴6e穿过所述加强凸台6g进行设置,且在压板6f的中部还开有配合气缸6a输出端使用的安装孔;气缸6a的输出端与压板6f为可拆卸连接。
[0045]
机械臂5的动作通过第三驱动装置5c来实现,本实施例中的第三驱动装置5c为一步进电机结构;其通过传动转轴5b带动夹持装置6的转动,实现夹持装置6在端平面上的90
°
变位;从而调整支杆2轴线的朝向;在图5中可以看到在机械臂5的左侧还固定有一个限位块,限位块用以限制夹持装置6的转动角度,故而在限位块与夹持装置相对的位置处还设置缓冲垫;
[0046]
夹持装置6的动作则是依靠有两个气缸6a分别带动上下的两个压板6f进行夹持。
[0047]
还包括控制器8;控制器8对驱动电机、吊机、第一驱动装置9、第二驱动装置7、第三驱动装置5c及气缸6a进行控制;在本实施例中,控制器8为 plc控制系统的控制柜;其连接结构可参考图11;控制器8与每个受控装置之间皆是单一对应的关系,即每个受控元件仅受控制器的控制。
[0048]
底架3的尾部与轨道1的尾部相平齐。
[0049]
本实用新型还提供了一种加气板的多模垛架的顶杆自动支护系统的使用方法,包括以下步骤:
[0050]
s1、确定整套系统无故障并复位后打开控制器8开始运行,此时载有加压板的活动底座2已进入轨道1;
[0051]
s2、由控制器控制滚轮1a处的驱动电机带动活动底座2移动到轨道1的尾部,确定活动底座2已移动到指定工位后由控制器8将活动底座2停车;
[0052]
s3、控制器8控制第二驱动装置7带动机械臂5上下移动,直至夹持装置6与支杆2b相对为止;
[0053]
s4、控制器8控制第一驱动装置9带动活动机架4靠近活动底座2,确定活动机架4达到指定与活动底座之间的距离后有控制器控制活动机架4停止运动运动;
[0054]
s5、控制器8控制气缸6a进行运动,是夹持装置6将支杆2b夹住;
[0055]
s6、控制器8控制第一驱动装置9带动活动机架4远离活动底座2,确定活动机架4达到指定与活动底座之间的距离后由控制器8停止活动机架4的运动;
[0056]
s7、控制器8控制第三驱动装置5c带动传动转轴5b转动,直至被夹持装置6所夹的支杆2b轴线垂直于地面位置;
[0057]
s8、控制器8控制第一驱动装置9带动活动机架4靠近活动底座2,直至支杆2b对准定位孔2a后将支杆2b放下装入;
[0058]
s9、控制器8将各个电机位置复位后控制吊机通过导向孔2c将后一个载有加压板的活动底座2提起并使后一个活动底座2的定位孔对准下方对应的支杆2b后放下即完成了一次堆垛。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1