物料交换装置的制作方法
1.本技术涉及一种用于自动化仓储物流领域的物料交换装置。
背景技术:
2.传统的物料交换装置将两处的物料进行互换时,先将第一处取放到暂存位,再将第二处取放到第一处,最后将暂存位取放到第二处,单次交换需要时间大约12s,存在效率低、取放操作过多的问题。
技术实现要素:
3.有鉴于此,有必要提供一种可以减少取放操作、提高交换效率的物料交换装置。
4.本技术一实施例中提供一种物料交换装置,包括第一抓取机构、第二抓取机构、第一承载台及第二承载台,所述第一承载台及第二承载台上分别放置有待交换位置的第一物料及第二物料,所述物料交换装置还包括输送机构;所述输送机构包括第一平台、第二平台、驱动装置及轨道,所述第一抓取机构用于抓取所述第一承载台上的第一物料并将所述第一物料移送至所述第一平台,所述第二抓取机构用于抓取所述第二承载台上的第二物料并将所述第二物料移送至所述第二平台;所述第一平台、第二平台在驱动装置驱动下沿所述轨道相对滑动并交换位置,所述第一抓取机构将所述第二平台上的第二物料移送至所述第一承载台,所述第二抓取机构将所述第一平台上的第一物料移送至所述第二承载台,以实现所述第一物料及第二物料的位置交换。
5.本技术一实施例中,所述第一抓取机构包括第一手爪、第二手爪、第一旋转架及第一旋转器,所述第一旋转架两端分别用于固定所述第一手爪、所述第二手爪,所述第一旋转器用于驱动所述第一旋转架旋转,所述第一手爪、第二手爪分别用于抓取物料。
6.本技术一实施例中,所述第二抓取机构包括第三手爪、第四手爪、第二旋转架及第二旋转器,所述第二旋转架两端分别用于固定所述第三手爪、所述第四手爪,所述第二旋转器用于驱动所述第二旋转架旋转,所述第三手爪、第四手爪分别用于抓取物料。
7.本技术一实施例中,所述第一手爪及所述第二手爪对称设置于所述第一旋转架上;所述第三手爪及所述第四手爪对称设置于所述第二旋转架上。
8.本技术一实施例中,所述输送机构还包括第一升降器,所述第一升降器滑动设于所述轨道并连接所述第一平台所,述第一升降器用于调节所述第一平台的高度。
9.本技术一实施例中,所述输送机构还包括第二升降器,所述第二升降器滑动设于所述轨道并连接所述第二平台,所述第二升降器用于调节所述第二平台的高度。
10.本技术一实施例中,所述第一手爪包括第一升降驱动件及第一吸附件,所述第二手爪包括第二升降驱动件及第二吸附件;所述第一升降驱动件用于驱动所述第一吸附件升降;所述第二升降驱动件用于驱动所述第二吸附件升降。
11.本技术一实施例中,所述第三手爪包括第三升降驱动件及第三吸附件,所述第四手爪包括第四升降驱动件及第四吸附件;所述第三升降驱动件用于驱动所述第三吸附件升
降;所述第四升降驱动件用于驱动所述第四吸附件升降。
12.本技术一实施例中,所述轨道包括第一滑轨及第二滑轨,所述第一平台滑动安装于所述第一滑轨上,所述第二平台滑动安装于第二滑轨上。
13.本技术一实施例中,所述驱动装置包括第一驱动器和第二驱动器,所述第一驱动器驱动所述第一平台沿所述轨道移动,所述第二驱动器驱动所述第二平台沿所述轨道移动。
14.上述物料交换装置利用第一抓取机构及第二抓取机构分别将物料放置到第一平台、第二平台,再通过第一驱动器、第二驱动器将第一平台和第二平台沿轨道更换位置,最后第一抓取机构及第二抓取机构抓取对方的物料,实现了减少取放操作的目的,提高了交换效率。
附图说明
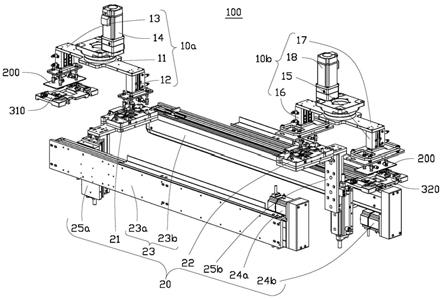
15.图1为本技术一实施例中物料交换装置的立体示意图。
16.图2为图1中物料交换装置另一状态的立体示意图。
17.图3为图1中物料交换装置另一状态的立体示意图。
18.图4为图1中物料交换装置的侧视图。
19.主要元件符号说明
20.物料交换装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
100
21.物料
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
200
22.第一抓取机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10a
23.第二抓取机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10b
24.第一手爪
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11
25.第一升降驱动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11a
26.第一吸附件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11b
27.第二手爪
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12
28.第二升降驱动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12a
29.第二吸附件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12b
30.第一旋转架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
13
31.第一旋转器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14
32.第三手爪
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
15
33.第三升降驱动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
15a
34.第三吸附件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
15b
35.第四手爪
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
16
36.第四升降驱动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
16a
37.第四吸附件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
16b
38.第二旋转架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
17
39.第二旋转器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
18
40.输送机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20
41.第一平台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21
42.第二平台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22
43.轨道
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
23
44.第一滑轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
23a
45.第二滑轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
23b
46.第一驱动器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
24a
47.第二驱动器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
24b
48.第一升降器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
25a
49.第二升降器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
25b
50.第一物料
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
210
51.第二物料
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
220
52.第一承载台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
310
53.第二承载台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
320
具体实施例
54.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
55.需要说明的是,当组件被称为
″
固定于
″
另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是
″
连接
″
另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是
″
设置于
″
另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语
″
垂直的
″
、
″
水平的
″
、
″
左
″
、
″
右
″
以及类似的表述只是为了说明的目的。
56.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本技术。本文所使用的术语
″
或/及
″
包括一个或多个相关的所列项目的任意的和所有的组合。
57.本技术一实施例中提供一种物料交换装置,包括第一抓取机构、第二抓取机构、第一承载台及第二承载台,所述第一承载台及第二承载台上分别放置有待交换位置的第一物料及第二物料,所述物料交换装置还包括输送机构;所述输送机构包括第一平台、第二平台、驱动装置及轨道,所述第一抓取机构用于抓取所述第一承载台上的第一物料并将所述第一物料移送至所述第一平台,所述第二抓取机构用于抓取所述第二承载台上的第二物料并将所述第二物料移送至所述第二平台;所述第一平台、第二平台在驱动装置驱动下沿所述轨道相对滑动并交换位置,所述第一抓取机构将所述第二平台上的第二物料移送至所述第一承载台,所述第二抓取机构将所述第一平台上的第一物料移送至所述第二承载台,以实现所述第一物料及第二物料的位置交换。
58.上述物料交换装置利用第一抓取机构及第二抓取机构分别将物料放置到第一平台、第二平台,再通过第一驱动器、第二驱动器将第一平台和第二平台沿轨道更换位置,最后第一抓取机构及第二抓取机构抓取对方的物料,实现了减少取放操作的目的,提高了交
换效率。
59.下面结合附图,对本技术的一些实施例作详细说明。在不冲突的情况下,下述的实施例及实施例中的特征可以相互组合。
60.请参阅图1,物料交换装置100包括第一抓取机构10a、第二抓取机构10b。第一抓取机构10a、第二抓取机构10b用于抓取物料200。物料交换装置100还包输送机构20。输送机构20包括第一平台21、第二平台22、轨道23。第一平台21、第二平台22可以在驱动装置驱动下沿轨道23滑动。驱动装置可以包含第一驱动器24a及第二驱动器24b。第一驱动器24a及第二驱动器24b。第一驱动器24a、第二驱动器24b用于分别驱动第一平台21、第二平台22沿轨道23移动,第一驱动器24a、第二驱动器24b可以通过传动带或丝杠驱动第一平台21、第二平台22移动。在本技术一实施例中,第一驱动器24a及第二驱动器24b均为直线电机。第一抓取机构10a和第二抓取机构10b分别设于轨道23两端,在物料交换装置100的两侧分别设置有承载台,承载台可以包括第一承载台310及第二承载台320,第一承载台310和第二承载台320上分别放置待交换位置的第一物料210及第二物料220,第一抓取机构10a、第二抓取机构10b将第一物料210及第二物料220(请参阅图2)在承载台与第一平台21、第二平台22之间交换,第一平台21、第二平台22用于交替承载并交换第一抓取机构10a和第二抓取机构10b上的物料200。
61.在本实施例中,第一抓取机构10a包括第一手爪11、第二手爪12、第一旋转架13及第一旋转器14。第二抓取机构10b包括第三手爪15、第四手爪16、第二旋转架17及第二旋转器18。第一手爪11及第二手爪12固定于第一旋转架13的两端上用于抓取物料200;第三手爪15及第四手爪16固定于第二旋转架17的两端上用于抓取物料200。第一旋转器14用于驱动第一旋转架13旋转;第二旋转器18用于驱动第二旋转架17旋转。在本技术一实施例中,第一旋转架13和第二旋转架17呈板状,并绕其中心旋转;第一旋转器14及第二旋转器18均为步进电机。
62.第一手爪11及第二手爪12呈以第一旋转架13的旋转中心呈180度设置,当第一旋转架13旋转180度时,第一手爪11及第二手爪12呈位置相互交换;同理第三手爪15及第四手爪16以第二旋转架17的旋转中心呈180度设置,当第二旋转架17旋转180度时,第三手爪15及第四手爪16位置相互交换。
63.本实施例中,输送机构20还包括第一升降器25a及第二升降器25b。第一平台21、第二平台22分别通过第一升降器25a及第二升降器25b滑动连接轨道23。第一升降器25a及第二升降器25b用于分别调节第一平台21、第二平台22的高度。本实施例中,第二旋转架17的高度高于第一旋转架13的高度:第一平台21/第二平台22输送物料200到第一旋转架13的第一手爪11或第二手爪12下方时需要通过第一升降器25a/第二升降器25b降低高度,到第二旋转架17的第三手爪15或第四手爪16下方时需要通过第一升降器25a/第二升降器25b抬升高度。由于轨道23为直线,第一平台21、第二平台22在交错移动过程中,通过第一升降器25a、第二升降器25b调节第一平台21、第二平台22的高度,使两者在运行时可以相互避让,避免相撞。
64.请参阅图3,在本实施例中,第一手爪11包括第一升降驱动件11a及第一吸附件11b;第二手爪12包括第二升降驱动件12a及第二吸附件12b。第一手爪11通过第一升降驱动件11a固定到第一旋转架13上;第二手爪12通过第二升降驱动件12a固定到第一旋转架13
上。第一升降驱动件11a用于驱动第一吸附件11b升降;第二升降驱动件12a用于驱动第二吸附件升降12b。
65.第三手爪15包括第三升降驱动件15a及第三吸附件15b;第四手爪16包括第四升降驱动件16a及第四吸附件16b。第三手爪15通过第三升降驱动件15a固定到第二旋转架17上;第四手爪16通过第四升降驱动件16a固定到第二旋转架17上。第三升降驱动件15a用于驱动第三吸附件15b升降;第四升降驱动件16a用于驱动第四吸附件升降16b。在本实施例中,第一吸附件11b、第二吸附件12b、第三吸附件15b及第四吸附件16b为吸嘴。
66.本实施例中,轨道23包括第一滑轨23a及第二滑轨23b。第一平台21安装于第一滑轨23a上,第二平台22安装于第二滑轨23b上。
67.请参阅图1、图2、图3及图4,物料交换装置100的一钟工作方式为:第一承载台310上承载第一物料210,第二承载台320承载第二物料220;第一旋转架13通过第一手爪11抓取第一物料210,第二旋转架17通过第三手爪15抓取第二物料220;第一电机23a驱动第一旋转架13转动180度,第二电机23b驱动第二旋转架17转动180度,此时第一平台21滑动至第一手爪11下方,第二平台22滑动至第三手爪15下方;第一手爪11将第一物料210放置于第一平台21上,第三手爪15将第二物料220放置于第二平台22上;第一驱动器24a驱动第一平台21在第一滑轨23a上滑动至第三手爪15下方,第二驱动器24b驱动第二平台22在第二滑轨23b上滑动至第一手爪11下方,在滑动过程中第一升降器25a和第二升降器25b调节第一平台21、第二平台22的高度相互避让;第一手爪11抓取第二平台22上的第二物料220,第三手爪15抓取第一平台21上的第一物料210;第一旋转器14再次驱动第一旋转架13转动180度,第二旋转器18再次驱动第二旋转架17转动180度;第一手爪11将第二物料220放置到第一承载台310上,第三手爪15将第一物料210放置到第二承载台320上,至此交换完毕。同时在第一手爪11与第三手爪15运作的同时,第二手爪12与第四手爪16可以同时运作交换物料。在本技术一实施例中,单次交换需要时间大约4秒。
68.可以理解的是,在本技术的其他实施例中,抓取机构可以是其他结构如机械手;每个旋转架可以安放其他数量的手爪,如四个手爪90度设置;升降器也可以设于旋转架上以驱动旋转架上升下降。
69.上述物料交换装置100利用第一抓取机构10a及第二抓取机构10b分别将物料放置到第一平台21、第二平台22,再通过第一驱动器24a、第二驱动器24b将第一平台21和第二平台22沿轨道23更换位置,最后第一抓取机构10a及第二抓取机构10b抓取对方的物料200,实现了减少取放操作的目的,提高了交换效率。
70.以上实施例仅用以说明本技术的技术方案而非限制,尽管参照以上较佳实施例对本技术进行了详细说明,本领域的普通技术人员应当理解,可以对本技术的技术方案进行修改或等同替换都不应脱离本技术技术方案的精神和范围。本领域技术人员还可在本技术精神内做其它变化等用在本技术的设计,只要其不偏离本技术的技术效果均可。这些依据本技术精神所做的变化,都应包含在本技术所要求公开的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1