轨道式集装箱门式起重机的制作方法
1.本实用新型涉及铁路运输装备技术领域,具体涉及一种轨道式集装箱门式起重机。
背景技术:
2.集装箱大量应用于货物转运中,对于集装箱的吊装,通常采用起重机进行。吊装集装箱的一种常用起重机为轨道式集装箱门式起重机,纵向上,其可沿轨道的长度方向往复运行;横向上,起重机小车可左右运行;垂直方向上,通常采用电机驱动拉索以实现集装箱的上升/下降。从而最终完成对集装箱的装卸。然而,轨道上容易堆积异物(集装箱装卸环境中的散落货物、随风飘来的灰尘、树叶等)或人员会走到轨道上,该异物或人的存在会影响沿轨道的顺畅运行,从而影响起重机的正常工作,或者至少缩短了起重机的使用寿命。
3.因此,需要一种轨道式集装箱门式起重机,以解决或至少减轻上述问题。
技术实现要素:
4.为了解决或至少减轻现有技术中的上述问题,即为了解决轨道上的异物,本实用新型实施例提供了一种轨道式集装箱门式起重机,包括轨道、起重机架、起重机小车、异物检测装置和异物清除装置,其中:
5.所述轨道为至少一对,并且每对所述轨道平行设置;
6.所述起重机架在第一动力单元的驱动下沿所述轨道的长度方向可往复滑动地安装,所述起重机架横跨一对所述轨道设置;
7.所述起重机小车在第二动力单元的驱动下沿与所述轨道的长度方向及垂直的方向可运动的安装于所述起重机,用于升降和左右移动集装箱;
8.所述异物检测装置的信号输出端与所述异物清除装置的控制端信号连接;
9.所述异物检测装置设置在所述轨道附近,所述异物清除装置设置在所述轨道附近,或者,所述异物清除装置安装于所述起重机架朝向所述轨道的端部;
10.所述异物检测装置用于检测所述轨道上是否有异物,所述异物清除装置用于清除所述轨道上的异物。
11.在一些优选实施例中,所述起重机架的下端安装有由所述第一动力单元驱动的行走轮,所述行走轮沿所述轨道运行,所述起重机包括第三动力单元和由所述第三动力单元驱动的拉索,所述异物检测装置的信号输出端与所述第一动力单元的控制端、所述第二动力单元的控制端和所述第三动力单元的控制端均信号连接。
12.在一些优选实施例中,所述异物检测装置为图像检测单元或红外传感器。
13.在一些优选实施例中,还包括遥控器,所述遥控器与所述第一动力单元的控制端、所述第二动力单元的控制端、所述第三动力单元的控制端和所述异物清除装置的控制端均信号连接。
14.在一些优选实施例中,所述起重机架的上端横向延伸出所述轨道以形成悬臂结
构。
15.在一些优选实施例中,所述异物清除装置设置在所述轨道附近,所述异物清除装置包括清扫机架及均安装于所述清扫机架的行走机构、翻转机构和清扫机构,其中:
16.所述翻转机构安装于所述行走机构,所述清扫机构安装于所述翻转机构,在所述行走机构的驱动下清扫机架沿所述轨道的延伸方向可往复运动,在所述翻转机构的驱动下所述清扫机构在第一翻转位置与第二翻转位置可运动;
17.所述第一翻转位置下,所述清扫机构贴近所述轨道的行走面;
18.所述第二翻转位置下,所述清扫机构从所述轨道的行走面移开,并且所述清扫机构与所述轨道之间保持能够供所述机架通过的间距。
19.在一些优选实施例中,所述行走机构包括由第四动力单元驱动的清扫轮,所述清扫轮可转动地安装于所述清扫机架的下端,所述第四动力单元的控制端与所述异物检测装置的信号输出端信号连接;
20.所述翻转机构包括由第五动力单元驱动的翻转框,所述第五动力单元的控制端与所述异物检测装置的信号输出端信号连接;
21.所述清扫机构包括第一清扫刷,所述第一清扫刷固定于所述翻转框。
22.在一些优选实施例中,所述异物清除装置还包括第一加热体,所述第一加热体固定于所述翻转框,所述第一加热体的控制端与所述异物检测装置的信号输出端信号连接。
23.在一些优选实施例中,所述异物清除装置安装于所述机架朝向所述轨道的端部,所述异物清除装置包括翻转杆和第二清扫刷,所述翻转杆在第六动力单元的驱动下在第三翻转位置和第四翻转位置之间可运动,其中:
24.所述第三翻转位置下,所述清扫刷贴近所述轨道的行走面;
25.所述第四翻转位置下,所述清扫刷从所述轨道的行走面移开。
26.在一些优选实施例中,所述异物清除装置还包括第二加热体,所述第二加热体固定于所述翻转杆,所述第二加热体的控制端与所述异物检测装置的信号输出端信号连接。
27.本实用新型实施例的有益效果为:
28.使用异物检测装置检测轨道上是否有异物,如果有异物第一动力单元停机,轨道式集装箱门式起重机停在轨道上静止,然后异物清除装置对异物进行清除,异物检测装置再次检测,如果仍有异物,继续清理,直至检测到轨道上没有异物为止,然后启动第一动力单元,起重机整体沿轨道的长度方向行走,从而完成集装箱的装卸。
附图说明
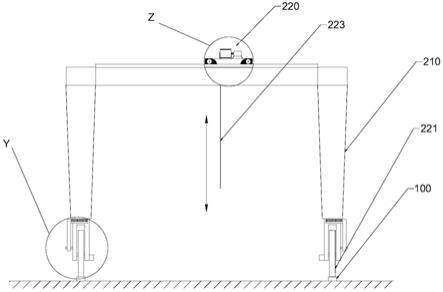
29.图1为轨道式集装箱门式起重机一实施例的正视图;
30.图2为图1中区域z的局部放大图;
31.图3为图1中区域y的局部放大图;
32.图4为图1的右视图;
33.图5位图4中区域w的局部放大图;
34.图6为轨道式集装箱门式起重机又一实施例的正视图;
35.图7为图6中区域v的局部放大图;
36.图8为图6的右视图;
37.图9为图8中区域u的局部放大图。
38.图中:
39.100、轨道;
40.210、起重机架;211、悬臂结构;220、起重机小车;221、行走轮;222、第三动力单元(拉索);223、拉索;224、卷筒;230、异物清除装置;231、清扫机架;232、清扫轮;233、翻转框;234、第一清扫刷;235、翻转杆;236、第二清扫刷;240、异物检测装置;
41.310、齿轮;320、齿条。
具体实施方式
42.下面参照附图来描述本实用新型的优选实施方式。本领域技术人员应当理解的是,这些实施方式仅仅用于解释本实用新型的技术原理,并非旨在限制本实用新型的保护范围。
43.参照图1和图6,本实用新型实施例公开了一种轨道式集装箱门式起重机,其包括轨道100、起重机架210、起重机小车220、异物检测装置240和异物清除装置230,其中:
44.所述轨道为至少一对,并且每对所述轨道平行设置;
45.所述起重机架在第一动力单元的驱动下沿所述轨道的长度方向可往复滑动地安装,所述起重机架横跨一对所述轨道设置;
46.所述起重机在第二动力单元的驱动下沿与所述轨道的长度方向及垂直的方向可滑动地安装于所述起重机,用于升降和左右移动集装箱;
47.所述异物检测装置的信号输出端与所述异物清除装置的控制端信号连接;
48.所述异物检测装置设置在所述轨道附近,所述异物清除装置设置在所述轨道附近,或者,所述异物检测装置安装于所述起重机架朝向所述轨道的端部,所述异物清除装置安装于所述起重机架朝向所述轨道的端部;
49.所述异物检测装置用于检测所述轨道上是否有异物,所述异物清除装置用于清除所述轨道上的异物。
50.使用异物检测装置检测轨道上是否有异物,如果有异物第一动力单元停机,轨道式集装箱门式起重机停在轨道上静止,然后异物清除装置对异物进行清除,异物检测装置再次检测,如果仍有异物,继续清理,直至检测到轨道上没有异物为止,然后启动第一动力单元,起重机整体沿轨道的长度方向行走,从而完成集装箱的装卸。
51.需要说明的是,异物检测装置可以为摄像头等基于图像的检测装置,也可以为超声等基于测距的检测装置,还可以为其他检测装置。
52.再次需要说明的是,第一动力单元可以为电机,该电机通过变速箱等传动机构驱动起重机架沿轨道的整体运动。
53.第二动力单元可以为电机,电机通过齿轮齿条传动方式驱动起重机的横向(与轨道的长度方向垂直的方向)运动,具体地,第二动力单元驱动齿轮310转动,起重机架上固定有横向延伸的齿条320,齿轮与齿轮啮合。
54.另外,所述起重机架的下端安装有由所述第一动力单元驱动的行走轮221,所述行走轮沿所述轨道滚动,所述起重机包括第三动力单元 222和由所述第三动力单元驱动的拉索223,所述异物检测装置的信号输出端与所述第一动力单元的控制端、所述第二动力单元
的控制端和所述第三动力单元的控制端均信号连接。
55.第三动力单元可以为电机,当其为电机时,其动力输出端通过联轴器连接卷筒224,拉索绕于卷筒上,通过第三动力单元驱动卷筒转动来使得拉索缠绕于卷筒或从卷筒释放,从而实现悬吊于拉索上的集装箱的上升和下降。
56.另外,所述异物检测装置为图像检测单元或红外传感器。
57.另外,还包括遥控器,所述遥控器与所述第一动力单元的控制端、所述第二动力单元的控制端、所述第三动力单元的控制端和所述异物清除装置的控制端均信号连接。通过遥控器的设置,使得作业人员可手动控制本实用新型的工作状态。
58.另外,所述起重机架的上端横向延伸出所述轨道以形成悬臂结构211。该悬臂结构使得横向上集装箱能够被转运至更远的距离,增大了集装箱的转运范围。
59.另外,参见图6至图9,所述异物清除装置设置在所述轨道附近,所述异物清除装置包括清扫机架231及均安装于所述清扫机架的行走机构、翻转机构和清扫机构,其中:
60.所述翻转机构安装于所述行走机构,所述清扫机构安装于所述翻转机构,在所述行走机构的驱动下清扫机架沿所述轨道的延伸方向可往复运动,在所述翻转机构的驱动下所述清扫机构在第一翻转位置与第二翻转位置可运动;
61.所述第一翻转位置下,所述清扫机构贴近所述轨道的行走面;
62.所述第二翻转位置下,所述清扫机构从所述轨道的行走面移开,并且所述清扫机构与所述轨道之间保持能够供所述机架通过的间距。
63.另外,所述行走机构包括由第四动力单元驱动的清扫轮232,所述清扫轮可转动地安装于所述清扫机架的下端,所述第四动力单元的控制端与所述异物检测装置的信号输出端信号连接;
64.所述翻转机构包括由第五动力单元237驱动的翻转框233,所述第五动力单元的控制端与所述异物检测装置的信号输出端信号连接;
65.所述清扫机构包括第一清扫刷234,所述第一清扫刷固定于所述翻转框。
66.另外,所述异物清除装置还包括第一加热体(图中未画出),所述第一加热体固定于所述翻转框,所述第一加热体的控制端与所述异物检测装置的信号输出端信号连接。
67.另外,参见图1至图5,所述异物清除装置安装于所述机架朝向所述轨道的端部,所述异物清除装置包括翻转杆235和第二清扫刷236,所述翻转杆在第六动力单元238的驱动下在第三翻转位置和第四翻转位置之间可运动,其中:
68.所述第三翻转位置下,所述清扫刷贴近所述轨道的行走面;
69.所述第四翻转位置下,所述清扫刷从所述轨道的行走面移开。
70.另外,所述异物清除装置还包括第二加热体,所述第二加热体固定于所述翻转杆,所述第二加热体的控制端与所述异物检测装置的信号输出端信号连接。
71.需要说明的是,在本实用新型的描述中,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
72.此外,还需要说明的是,在本实用新型的描述中,除非另有明确的规定和限定,术
语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本实用新型中的具体含义。
73.术语“包括”或者任何其它类似用语旨在涵盖非排他性的包含,从而使得包括一系列要素的过程、物品或者设备/装置不仅包括那些要素,而且还包括没有明确列出的其它要素,或者还包括这些过程、物品或者设备/装置所固有的要素。
74.至此,已经结合附图所示的优选实施方式描述了本实用新型的技术方案,但是,本领域技术人员容易理解的是,本实用新型的保护范围显然不局限于这些具体实施方式。在不偏离本实用新型的原理的前提下,本领域技术人员可以对相关技术特征作出等同的更改或替换,这些更改或替换之后的技术方案都将落入本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1