无接触传送设备的制作方法
1.本实用新型实施例涉及传送设备领域,特别涉及一种无接触传送设备。
背景技术:
2.在生产活动中通常有大量的待传送物需要输送,为减轻劳动强度,提高劳动生产率,需采用不同的传送设备来完成物料的输送。特别是生产中实现了单机自动化后,更需要传送设备在单机之间进行有机地衔接,进而组成自动生产线。因此,传送设备贯穿整个生产过程始终。
3.但现目前的传送设备容易污染或损坏待传送物。
技术实现要素:
4.本实用新型实施例解决的技术问题为提供一种无接触传送设备,解决待传送物被污染及损坏的问题。
5.为解决上述问题,本实用新型实施例提供一种无接触传送设备,用于传送待传送物且所述待传送物沿预设传送方向传输,包括:交替排列的第一喷嘴组与第二喷嘴组;所述第一喷嘴组适于向所述待传送物喷出具有第一气流方向的第一气体,所述第一气流方向与所述预设传送方向相垂直,以使所述待传送物高于且不接触所述第一喷嘴组与所述第二喷嘴组;所述第二喷嘴组适于向所述待传送物喷出具有第二气流方向的第二气体,所述第二气流方向与所述第一气流方向的夹角在0
°
至90
°
范围内;控制模块,所述控制模块与所述第二喷嘴组连接,并控制所述第二喷嘴组,以使所述第二气流方向与所述预设传送方向之间的夹角可调,以使所述待传送物在所述预设传送方向上移动。
6.另外,所述控制模块包括:方向控制单元,用于提供第一驱动信号和第二驱动信号;电机,所述电机与所述方向控制单元连接,并基于所述第一驱动信号以驱动所述第二喷嘴组从初始位置开始转动,以使所述第二气流方向与所述预设传送方向的夹角逐渐减小,基于所述第二驱动信号以驱动所述第二喷嘴组转动,以使所述第二喷嘴组回到所述初始位置。
7.另外,所述控制模块还包括:第一气流控制单元,所述第一气流控制单元与所述第一喷嘴组连接,并控制所述第一喷嘴组喷出的所述第一气体的流量;所述第一气流控制单元还与所述方向控制单元连接;所述第一气流控制单元接收到所述第一驱动信号时的流量,小于所述第一气流控制单元接收到所述第二驱动信号时的流量。
8.另外,所述控制模块还包括:高度传感器,所述高度传感器适于测量所述待传送物所处的位置的高度数据并反馈给所述第一气流控制单元以调节所述第一喷嘴组的第一气体的流量。
9.另外,所述控制模块还包括:第二气流控制单元,所述第二气流控制单元与所述第二喷嘴组连接,并控制所述第二喷嘴组喷出的所述第二气体的流量;所述第二气流控制单元还与所述方向控制单元连接;所述第二气流控制单元接收到所述第一驱动信号时的流量
大于零,第二气流控制单元接收到所述第二驱动信号时的流量为零。
10.另外,所述控制模块还包括:传动链条,所述传动链条与全部所述第二喷嘴组连接;所述传动链条还与所述电机连接,在所述电机的驱动下,所述传动链条带动全部所述第二喷嘴组统一转动。
11.另外,所述控制模块还包括:第一流量计和第二流量计;所述第一流量计适于测量所述第一气体的流量;所述第二流量计适于测量所述第二气体的流量。
12.另外,所述第二气流方向与所述第一气流方向的夹角在0
°
至45
°
范围内。另外,在所述预设传送方向上,所述第一喷嘴组具有至少一列第一喷嘴;所述第二喷嘴组具有至少一列第二喷嘴。
13.另外,所述第一喷嘴的形状为矩形或椭圆形;且所述第二喷嘴的形状为矩形或椭圆形。
14.与现有技术相比,本实用新型实施例提供的技术方案具有以下优点:
15.本实用新型提供的无接触传送设备,包括交替排列的第一喷嘴组与第二喷嘴组。第一喷嘴组的第一气流方向与预设传送方向相垂直,使得待传送物高于且不接触第一喷嘴组与第二喷嘴组,从而避免了待传送物与第一喷嘴组及第二喷嘴组的直接接触,降低了对待传送物的污染。第二喷嘴组的第二气流方向与第一气流方向的夹角在0
°
至90
°
范围内,且控制模块可以调节第二气流方向以使待传送物在预设传送方向上移动,如此,能够避免使用其它机械组件推动待运输物,从而避免由机械组件的推动对待运输物造成的磨损。
16.另外,方向控制单元用于提供第一驱动信号和第二驱动信号。电机基于第一驱动信号以驱动第二喷嘴组从初始位置开始转动,以使第二气流方向与预设传送方向的夹角逐渐减小,基于第二驱动信号以驱动第二喷嘴组转动,以使第二喷嘴组回到初始位置,从而实现对第二喷嘴组转动方向的精确控制。
附图说明
17.一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
18.图1
‑
图2为本实用新型实施例提供的无接触传送设备的整体结构示意图;
19.图3为本实用新型实施例提供的无接触传送设备的功能框图;
20.图4
‑
图7为本实用新型实施例提供的无接触传送设备的局部结构示意图;
21.图8为本实用新型实施例提供的无接触传送设备的方向控制单元的结构示意图。
具体实施方式
22.由背景技术可知,现有技术的传送设备容易污染或损坏待传送物。
23.经分析发现,主要原因包括:现有技术的通常采用电磁式、超声驻波悬浮、静电式或超声近场悬浮等技术,使待传送物悬浮于传送设备上;同时还需要物料推块作为前进的辅助以使待传送物沿着预设传送方向移动。由于物料推块与待传送物的侧边接触,可能会造成待传送物侧边污染或损坏。
24.为解决上述问题,本实用新型实施例提供一种无接触传送设备,包括:交替排列的
第一喷嘴组与第二喷嘴组。第一喷嘴组的第一气流方向与预设传送方向相垂直,能够避免待传送物与第一喷嘴组及第二喷嘴组的直接接触,降低了对待传送物的污染。第二喷嘴组的第二气流方向与第一气流方向的夹角在0
°
至90
°
范围内,且控制模块可以调节第二喷嘴组的第二气流方向以使待传送物在预设传送方向上移动,如此,能够避免使用物料推块等机械组件推动待传送物,从而避免由机械组件的推动对待传送物造成的污染或磨损。
25.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型的各实施例进行详细的阐述。然而,本领域的普通技术人员可以理解,在本实用新型各实施例中,为了使读者更好地理解本技术而提出了许多技术细节。但是,即使没有这些技术细节和基于以下各实施例的种种变化和修改,也可以实现本技术所要求保护的技术方案。
26.本实用新型实施例提供一种无接触传送设备。图1
‑
图8为本实施例提供的无接触传送设备的示意图。以下将结合附图进行具体说明。
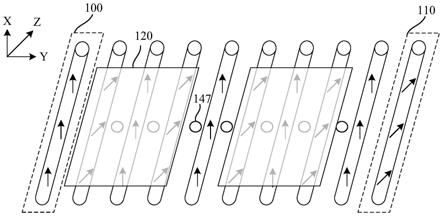
27.参考图1
‑
图8,无接触传送设备交替排列的第一喷嘴组100与第二喷嘴组110;第一喷嘴100组适于向待传送物120喷出具有第一气流方向的第一气体,第一气流方向与预设传送方向相垂直,以使待传送物高于且不接触第一喷嘴组100与第二喷嘴组110;第二喷嘴组110适于向待传送物120喷出具有第二气流方向的第二气体,第二气流方向与第一气流方向的夹角在0至90
°
范围内;控制模块140,控制模块140与第二喷嘴组110连接,并控制第二喷嘴组110,以使第二气流方向与预设传送方向之间的夹角可调,以使待传送物在预设传送方向上移动。
28.本实施例中,待传送物120为对环境洁净度要求较高的硅片。且该硅片可以用于制造太阳能电池片或者其他半导体器件(比如cmos管)。在硅片的传送过程中,相邻硅片的间距为4cm~6cm,比如可以为5cm。
29.在其它实施例中,待传送物可以是其它需要保持高洁净度的半导体片。
30.具体地,参考图1,图1为本实用新型实施例提供的无接触传送设备的整体结构示意图。第一喷嘴组100适于向待传送物120喷出具有第一气流方向的第一气体,第一气流方向与预设传送方向相垂直。本实施例中,第一气流方向为x方向,预设传送方向为y方向,x方向还垂直于第一喷嘴组100及第二喷嘴组110的排列的平面。
31.第一气体能够对待传送物120施加x方向上的升力,使得待传送物120能够高于且不接触第一喷嘴组100与第二喷嘴组110。即待传送物120受到第一气体向上的升力后,能够悬浮在第一喷嘴组100及第二喷嘴组110上。由于待传送物120与第一喷嘴组100及第二喷嘴组110之间没有直接接触,从而能够降低对待传送物120的污染。
32.第二喷嘴组110适于向待传送物120喷出具有第二气流方向的第二气体,第二气流方向与第一气流方向的夹角在0
°
至90
°
范围内。本实施例中,第二气流方向为z方向。即第二气流方向(z方向)位于第一气流方向(x方向)与预设传送方向(y方向)之间。
33.进一步地,在传送开始前或传送结束后,第二气流方向与第一气流方向之间的夹角可以为0
°
,此时,第二气体仅为待传送物120提供向上的升力,以使待传送物高于且不接触第一喷嘴组和第二喷嘴组。
34.在传送的过程中,第二气流方向与第一气流方向之间的夹角大于0
°
,且小于90
°
。可以理解的是,可以将第二气体对待传送物120的作用力分解为x方向的升力和y方向上的
推动力。因此,第二气体可以推动待传送物120运输,同时也能使待传送物120悬浮于第一喷嘴组100及第二喷嘴组110上。由于第二气体可以为待传送物120提供推动力以使待传送物沿着预设传送方向y方向运输,因此,可以避免使用物料推块等机械组件直接推动待传送物120,从而避免物料推块等机械组件对待传送物120的污染或损坏。
35.优选地,第二气流方向(z方向)与第一气流方向(x方向)的夹角在0
°
至45
°
范围内。即当第二气流方向(z方向)与第一气流方向(x方向)的最大夹角为45
°
时,第二气体对待传送物120的推动力及升力相等,能够使得待传送物120同时受到较大的推动力及升力,进而使得待传送物同时具有较大的传送速率和稳定性。
36.在其他实施例中,第二气流方向与第一气流方向的最大夹角可以为40
°
、50
°
或60
°
。
37.第一喷嘴组100与第二喷嘴组110交替排列,可以提高待传送物120受力的均匀性。在一个例子中,如图1所示,待传送物120的边缘区域受到第二喷嘴组110的作用力,待传送物120的中间区域受到第一喷嘴组100的作用力,即待传送物120能够同时受到稳定的升力及推动力。
38.在预设传送方向(y方向)上,第一喷嘴组100具有至少一列第一喷嘴;第二喷嘴组110具有至少一列第二喷嘴。在本实施例中,第一喷嘴组100具有一列第一喷嘴;第二喷嘴组110具有一列第二喷嘴。一列第一喷嘴100与第二喷嘴110交替排列,能够最大程度地提高待传送物120受力的均匀性。
39.在其它实施例中,第一喷嘴组也可以具有两列及两列以上的第一喷嘴;第二喷嘴组也可以具有两列及两列以上的第二喷嘴。在一个例子中,参考图2,第一喷嘴组200具有一列第一喷嘴,第二喷嘴组210具有两列第二喷嘴。由于第二喷嘴的数量较多,第二喷嘴组210能提供给待传送物220较大的推动力,以提高待传送物的传送速度。在其它例子中,若待传送物的重量较大,为提高对待传送物的升力,也可相应地增加第一喷嘴组的第一喷嘴的数量。
40.继续参考图1,本实施例中,第一喷嘴组100为风刀。风刀包括风刀杆及位于风刀杆上的多个第一喷嘴。风刀杆在垂直于预设传送方向上延伸。当压缩气体进入风刀后,压缩气体以气流薄片的形式从第一喷嘴处高速吹出,从而形成一面薄薄的高强度、大气流的冲击风幕。
41.第一喷嘴的形状对气流运动的影响很大,尤其会影响到流量和气流分布。第一喷嘴的形状为矩形或椭圆形。矩形或椭圆形的第一喷嘴喷出的第一气体具有较大的流量和较为均匀的气流分布。
42.在其它实施例中,第一喷嘴组还可以由多个独立的喷气头组成。
43.本实施例中,第二喷嘴组110为风刀。风刀包括风刀杆及位于风刀杆上的多个第二喷嘴。
44.第二喷嘴的形状为矩形或椭圆形,有利于风刀旋转时,气流平稳推送待传送物进行移动。
45.在其它实施例中,第二喷嘴组还可以由多个独立的喷气头组成。
46.参考图3,控制模块140与第二喷嘴组110连接,并控制第二喷嘴组110,以使第二气流方向(z方向)与预设传送方向(y方向)之间的夹角可调,以使待传送物120在预设传送方
向(y方向)上移动。因此,调节第二气流方向(z方向),可以调节待传送物120在预设传送方向(y方向)上的受到的推动力,以改变待传送物120的传送速率。
47.控制模块140包括方向控制单元141,用于提供第一驱动信号和第二驱动信号;电机145,电机145与方向控制单元141连接,并基于第一驱动信号以驱动第二喷嘴组110从初始位置开始转动,以使第二气流方向与预设传送方向的夹角逐渐减小,基于第二驱动信号以驱动第二喷嘴组110转动,以使第二喷嘴组110回到初始位置。
48.即第一驱动信号和第二驱动信号为方向信号,方向控制单元141用于提供方向信号,电机145根据接收到的方向信号调节第二喷嘴组110的转动方向,以完成对待传送物120的传送。
49.进一步结合参考图3及图8,本实施例中,方向控制单元141包括旋转飞轮149、设置于旋转飞轮149上的第一感应柱151和第二感应柱161,以及设置于旋转飞轮149一侧的第一传感器171及第二传感器181。第一感应柱151及第二感应柱161设置在旋转飞轮149直径的两端上,在旋转飞轮149旋转过程中,若第一传感器171感应到第一感应柱151,则向外发送第一驱动信号;若第二传感器181感应到第二感应柱161,则向外发送第二驱动信号。
50.可以理解的是,在其它实施例中,也可以增加传感器及感应柱的数量,以向外发送更多的方向信号,从而加强对第一喷嘴组及第二喷嘴组的控制。
51.在本实施例中,第一驱动信号和第二驱动信号还可以为转速信号,即方向控制单元141还用于提供转速信号,电机145根据接收到的转速信号以调节第二喷嘴组转向时的速度,进而调节待传送物120的传送速度。例如,当接收到第一驱动信号后,降低旋转飞轮149的转动速度,以降低第二喷嘴组110的第二气流方向(z方向)的变化速度,从而提高待传送物120的稳定性;当接收到第二驱动信号后,提高旋转飞轮149的转动速度,以使第二喷嘴组110快速回转至初始位置。
52.控制模块140还包括:传动链条146,传动链条146与全部第二喷嘴组110连接;传动链条146还与电机145连接,在电机145的驱动下,传动链条146带动全部第二喷嘴组110统一转动。
53.即传动链条146能够实现全部第二喷嘴组110的同步转动,且传动链条146只需连接一个电机,从而能够减少电机数量,降低成本。另外,全部第二喷嘴组110同步转动,也有利于保证气流的稳定性。
54.控制模块140还包括:第一气流控制单元142,第一气流控制单元142与第一喷嘴组100连接,并控制第一喷嘴组100喷出的第一气体的流量;第一气流控制单元142还与方向控制单元141连接;第一气流控制单元142接收到第一驱动信号时的流量,小于第一气流控制单元142接收到第二驱动信号时的流量。
55.即第一气流控制单元142能够基于方向信号,对第一喷嘴组100的第一气体的流量进行控制,以使待传送物120在传送过程中,能够保持在相对统一的高度上,从而提高待传送物120的稳定性。
56.本实施例中,第一气流控制单元142为电磁阀。
57.本实施例中,待传送物120与第一喷嘴组100及第二喷嘴组110上表面的高度差为2mm~4mm,比如可以为3mm。
58.本实施例中,第一气体的流量大小为0.45mpa~0.55mpa,比如可以为0.50mpa。
59.控制模块140还包括:第二气流控制单元148,第二气流控制单元148与第二喷嘴组110连接,并控制第二喷嘴组110喷出的第二气体的流量;第二气流控制单元148还与方向控制单元141连接;第二气流控制单元148接收到第一驱动信号时的流量大于零,第二气流控制单元148接收到第二驱动信号时的流量为零。
60.即第二气流控制单元148能够基于方向信号,对第二喷嘴组110的第一气体的流量进行控制,以使待传送物120在传送过程中,能够受到较为均衡的推动力及升力;并使待传送物120在达到预设位置后,能够停止移动。
61.本实施例中,第二气流控制单元148为电磁阀。
62.控制模块140还包括:第一流量计143和第二流量计144;第一流量计143适于测量第一气体的流量;第二流量计144适于测量第二气体的流量。
63.本实施例中,第一流量计143还与第一气流控制单元142连接,第一流量计143将测量的第一气体的流量反馈给第一气流控制单元142,第一流量控制单元142根据反馈的数据进一步调节第一气体的流量,以使待传送物120悬浮于合适的高度。
64.值得注意的是,第一流量计143还可以通过可编程逻辑控制器(programmable logic controller,plc)与第一气流控制单元142连接。plc是一种具有微处理器的数字电子设备,可接收(输入)及发送(输出)多种类型的电气或电子信号,并以此来控制或监督各种机械与电气系统。
65.本实施例中,第二流量计144还与第二气流控制单元148连接,第二流量计144将测量的第二气体的流量反馈给第二气流控制单元148,第二流量控制单元148根据反馈的数据进一步调节第二气体的流量,以使待传送物120具有合适的传送速度和悬浮高度。
66.第二流量计144还可以通过plc与第二气流控制单元148连接。
67.控制模块140还包括:高度传感器147,高度传感器147适于测量待传送物所处的位置的高度数据并反馈给第一气流控制单元以调节第一喷嘴组110的第一气体的流量。
68.具体地,在第一喷嘴组100及第二喷嘴组110的排列方向上,相邻第一喷嘴组100与第二喷嘴组110之间都设置一个高度传感器147。通过比较相邻传感器147检测的高度差值,以确认待传送物120是否处于相对统一的高度上。进一步,可以设置高度差值阈值,若相邻高度传感器147检测的高度差值在高度差值阈值范围内,则无需调节第一气体流量大小;若相邻高度传感器147检测的高度差值在高度差值阈值范围外,则调节第一气体流量大小,以使待传送物位于相对统一的高度上。
69.可以理解的是,在其它实施例中,高度传感器还可以与第二气流控制单元连接。高度传感器可以将测量的待传送物的高度数据反馈给第二气流控制单元以调节第二喷嘴组的第二气体的流量。即待传送物的高度可以通过第一气流控制单元或第二气流控制单元中的一者实现。
70.以下将对待传送物120的传送过程中的几个阶段进行详细说明。
71.第一阶段,开始传送前,结合参考图3、图4及图8,此时第一感应柱151被第一传感器171感应到;第一传感器171向外发送第一驱动信号;第二气流控制单元148接收到第一驱动信号后,向外喷出第二气体,即第二气体的流量大于零,此时第二气流方向与预设传送方向垂直;电机135接收到第一驱动信号后驱动传动链条146,传动链条146带动全部第二喷嘴110从初始位置开始转动,第二气流方向开始发生变化。
72.此时,由于第二喷嘴组110也开始喷气,因此,第一气流控制单元142喷出的第二气体的流量较小。
73.本实施例中,旋转飞轮149的旋转方向为逆时针,第二喷嘴组110的旋转方向为顺时针。
74.第二阶段,传送过程中,结合参考图3、参考图5及图8。在旋转飞轮149的带动下,第二喷嘴组110顺时针旋转,使得第二气流方向与预设传送方向的夹角逐渐减小。
75.本实施例中,传送过程中的第二气体的流量不变。由于第二气流方向发生变化,第二气体向待传送物提供的升力逐渐减小;为保证传送过程中的待传送物的高度不变,第一气体的流量逐渐增大。
76.在其它实施例中,也可以根据具体的传送要求,使第二气体的流量逐渐减小或逐渐增大。相应的,也可对第一气体的流量进行调节,比如保持不变或逐渐减小。
77.为提高待传送物的稳定性,本实施例中,旋转飞轮149及第二喷嘴组110的旋转速度较慢。在其它实施例中,为提高传送的效率,可以相应地增大旋转飞轮及第二喷嘴组的旋转速度。
78.第三阶段,待传送物到达预设位置,结合参考图3、参考图6及图8。此时,旋转飞轮149共旋转180
°
,第二喷嘴组120共旋转45
°
;第二气流方向与第一气流方向的夹角达到最大值;第二感应柱161被第二传感器181感应到;第二传感器181向电机145发送第二驱动信号。在电机145接收到第二驱动信号后,电机145将会提高驱动速度,以使第二喷嘴组110快速回到初始位置;第二气流控制单元148将会使第二喷嘴组110停止喷气;第一气流控制单元142将会增大第一喷嘴组100的第一气体的流量,以使待传送物悬停在合理的高度。
79.第四阶段,第二喷嘴组110回转。结合参考图3、参考图7及图8,此时,第二气流控制单元148基于第二驱动信号使第二喷嘴组110停止喷气,即第二气体的流量为零;电机145基于第二驱动信号,提高旋转飞轮149的旋转速度,以使第二喷嘴组110能快速回到初始位置;第一气流控制单元142基于第二驱动信号增大第一气体的流量,以保持待传送物的高度。
80.由于第二喷嘴组110不再喷气,为使待传送物的高度不下降,因此,第一气体的流量较大。即第一气流控制单元142接收到第一驱动信号时的流量,小于第一气流控制单元142接收到第二驱动信号时的流量。
81.重复以上四个阶段,即可实现连续的无接触传送。
82.综上所述,本实施例中的无接触传送设备,包括交替排列的第一喷嘴组100与第二喷嘴组110。第一喷嘴组100及第二喷嘴组110相配合,以使待传送物120悬浮在第一喷嘴组100和第二喷嘴组110之上,并使待传送物120在预设传送方向上移动,从而避免机械组件与待传送物120直接接触造成的污染或磨损。
83.本领域的普通技术人员可以理解,上述各实施方式是实现本实用新型的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本实用新型的精神和范围。任何本领域技术人员,在不脱离本实用新型的精神和范围内,均可作各自更动与修改,因此本实用新型的保护范围应当以权利要求限定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1