一种共轨斗轮机安全防护系统的制作方法
1.本实用新型涉及斗轮机技术领域,尤其是一种共轨斗轮机安全防护系统。
背景技术:
2.斗轮机是火电厂煤场、散料码头等散料场的主要设备,主要用于散料在场地上的堆和取作业。随着斗轮机无人值守全自动控制的实施,斗轮机的安全保护是自动控制安全可靠运行的关键。对于运行于同一条轨道上的2台斗轮机,其间的防撞主要是依靠空间定位,在一定的安全距离条件下控制斗轮机的大车行走、悬臂俯仰和回转动作。参考中国专利公开号为cn204832531u的斗轮机精确定位系统,包括斗轮机斗轮;斗轮机大车;斗轮机悬臂;安装于输煤程控控制室的卫星定位服务器;安装于斗轮机斗轮两侧的卫星定位天线、卫星定向天线,该卫星定位天线和卫星定向天线与卫星通过gps卫星信号连接;安装于斗轮机悬臂尾部的卫星定位移动站,其接于卫星定位服务器,所述卫星定位天线和卫星定向天线与卫星定位移动站之间通过同轴电缆连接;卫星定位固定站,其与卫星定位移动站之间通过gps卫星信号连接,所述卫星定位固定站与卫星之间通过gps卫星信号连接。
3.现有技术的缺陷是:共轨斗轮机的防撞的空间定位技术普遍采用gps差分定位方法,正常情况下定位精度很高,但在天气条件恶劣的情况下,定位数据会不准确甚至失效进而防撞工作受到不利影响。
技术实现要素:
4.本实用新型解决了现有共轨斗轮机防撞的空间定位方法受天气变化而产生不利影响、可靠性低的问题,提出一种共轨斗轮机安全防护系统,采用多重定位技术组合方式,提高空间定位可靠性,增加大车和悬臂实时防撞检测方式,形成主动检测,提高安全防护可靠性。
5.为实现上述目的,提出以下技术方案:
6.一种共轨斗轮机安全防护系统,包括集中控制系统和若干套安全防护系统,所述一套安全防护系统安装在一台斗轮机上,所述安全防护系统包括单机控制系统、定位系统和实时防撞检测系统,所述单机控制系统、定位系统和实时防撞检测系统通过网线与集中控制系统进行连接,所述实时防撞检测系统包括大车防撞检测装置和悬臂防撞检测装置,所述大车防撞检测装置包括激光测距装置,安装在大车前侧,用于检测斗轮机大车与前方斗轮机尾车之间的间距,所述悬臂防撞检测装置包括雷达测距装置阵列,安装在悬臂头部两侧,用于检测进入本地悬臂和煤堆与共轨斗轮机悬臂的距离;所述定位系统包括卫星精确定位系统和编码器定位系统,用于斗轮机的精确空间定位。
7.定位系统包括卫星精确定位系统和编码器定位系统,设置两套定位系统,有利于更加精确地对斗轮机进行定位,并提供冗余保护,确保定位系统的可靠性;采用二套精确定位系统,为共轨斗轮机提供高精度和高可靠性的空间检测,实现共轨斗轮机之间大车、悬臂、尾车的防撞。采用主动直接的防撞检测和间接的空间分析防撞,实现不同方式的冗余防
撞,提高防撞可靠性,减少事故可能性。
8.雷达测距装置具有探测角,采用雷达测距装置阵列可形成一个防撞检测带。检测结果返回单机控制系统。
9.作为优选,所述集中控制系统,用于接收各斗轮机的精确定位数据,计算和分析各斗轮机的相互空间位置关系,分析和判断共轨斗轮机之间的悬臂、大车、尾车之间的安全距离,以及判决产生防撞报警信息和下发单机控制系统的运行参数及开始或停止作业指令。
10.作为优选,所述单机控制系统是斗轮机上的plc系统,用于将卫星精确定位系统的经纬度和高程空间数据换算为大车位置、悬臂俯仰和回转角度,所述单机控制系统在集中控制系统的指令下控制本地斗轮机机构的自动作业以及接收定位系统和实时防撞检测系统的实时数据,并将报警信息和作业过程信息发送至集中控制系统。
11.作为优选,所述卫星精确定位系统为gps或北斗精确定位系统,包括定位基站和大车移动站及悬臂移动站,定位基站与大车移动站及悬臂移动站信号连接,用于获取大车和悬臂的经纬度和高程空间数据,采用rtk技术,定位精确可达厘米级别。
12.作为优选,所述编码器定位系统包括大车编码器装置、大车校准装置、俯仰角度编码器装置、俯仰角度校准装置、回转角度编码器装置、回转角度校准装置,所述大车编码器装置与大车校准装置通过rfid校准,所述俯仰角度编码器装置与俯仰角度校准装置通过rfid校准,所述回转角度编码器装置与回转角度校准装置通过rfid校准。编码器定位系统用于提供高可靠性、高精度的大车、悬臂俯仰角度和回转角度数据,减少因机构打滑及长期运行产生的累积检测偏差。
13.作为优选,所述激光测距装置设有2套,安装在大车前端左右两侧。
14.作为优选,露天煤场采用gps或北斗精确定位系统和编码器定位系统的组合配置进行冗余保护,而封闭煤场采用2套编码器定位系统组合配置进行冗余保护。
15.本实用新型的有益效果是:采用二套精确定位系统,为共轨斗轮机提供高精度和高可靠性的空间检测,实现共轨斗轮机之间大车、悬臂、尾车的防撞。采用主动直接的防撞检测和间接的空间分析防撞,实现不同方式的冗余防撞,提高防撞可靠性,减少事故可能性。
附图说明
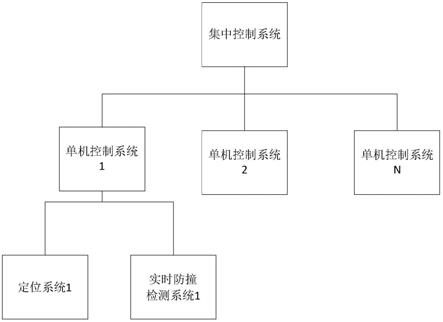
16.图1本实用新型一个实施例的n台共轨斗轮机安全防护系统图。
17.图2本实用新型一个实施例的露天煤场条件下的定位系统图。
18.图3本实用新型一个实施例的封闭煤场条件下的定位系统图。
19.图4本实用新型一个实施例的gps或北斗精确定位系统图。
20.图5本实用新型一个实施例的编码器定位系统图。
21.图6本实用新型一个实施例的实时防撞检测系统图。
22.其中:901
‑
斗轮机大车,902
‑
斗轮机悬臂,903
‑
斗轮机尾车,904斗轮机轨道,991
‑
大车防撞检测装置,992
‑
悬臂防撞检测装置。
具体实施方式
23.实施例:
24.本实施例提出一种共轨斗轮机安全防护系统,参考图1和图6,包括集中控制系统和若干套安全防护系统,一套安全防护系统安装在一台斗轮机上,n台斗轮机共轨运行在斗轮机轨道904上,安全防护系统包括单机控制系统、定位系统和实时防撞检测系统,单机控制系统、定位系统和实时防撞检测系统通过网线与集中控制系统进行连接,实时防撞检测系统包括大车防撞检测装置991和悬臂防撞检测装置992,大车防撞检测装置991包括激光测距装置,安装在大车前侧,用于检测斗轮机大车901与前方斗轮机尾车903之间的间距,悬臂防撞检测装置992包括雷达测距装置阵列,安装在斗轮机悬臂902头部两侧,用于检测进入本地悬臂和煤堆与斗轮机悬臂902的距离;雷达测距装置具有探测角,采用雷达测距装置阵列可形成一个防撞检测带,检测结果返回单机控制系统。定位系统包括卫星精确定位系统和编码器定位系统,用于斗轮机的精确空间定位。激光测距装置设有2套,安装在大车前端左右两侧;
25.集中控制系统用于接收各斗轮机的精确定位数据,计算和分析各斗轮机的相互空间位置关系,分析和判断共轨斗轮机之间的悬臂、大车、尾车之间的安全距离,以及判决产生防撞报警信息和下发单机控制系统的运行参数及开始或停止作业指令。
26.单机控制系统是斗轮机上的plc系统,用于将卫星精确定位系统的经纬度和高程空间数据换算为大车位置、悬臂俯仰和回转角度,单机控制系统在集中控制系统的指令下控制本地斗轮机机构的自动作业以及接收定位系统和实时防撞检测系统的实时数据,并将报警信息和作业过程信息发送至集中控制系统。
27.参考图4和图5,卫星精确定位系统为gps或北斗精确定位系统,包括定位基站和大车移动站及悬臂移动站,定位基站与大车移动站及悬臂移动站信号连接,用于获取大车和悬臂的经纬度和高程空间数据,采用rtk技术,定位精确可达厘米级别。编码器定位系统包括大车编码器装置、大车校准装置、俯仰角度编码器装置、俯仰角度校准装置、回转角度编码器装置、回转角度校准装置,大车编码器装置与大车校准装置通过rfid校准,俯仰角度编码器装置与俯仰角度校准装置通过rfid校准,回转角度编码器装置与回转角度校准装置通过rfid校准。
28.参考图2和图3,露天煤场采用gps或北斗精确定位系统和编码器定位系统的组合配置进行冗余保护,而封闭煤场采用2套编码器定位系统组合配置进行冗余保护。
29.编码器定位系统用于提供高可靠性、高精度的大车、悬臂俯仰角度和回转角度数据,减少因机构打滑及长期运行产生的累积检测偏差。
30.定位系统包括卫星精确定位系统和编码器定位系统,设置两套定位系统,有利于更加精确地对斗轮机进行定位,并提供冗余保护,确保定位系统的可靠性;采用二套精确定位系统,为共轨斗轮机提供高精度和高可靠性的空间检测,实现共轨斗轮机之间大车、悬臂、尾车的防撞。采用主动直接的防撞检测和间接的空间分析防撞,实现不同方式的冗余防撞,提高防撞可靠性,减少事故可能性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1