条带部段切割系统的制作方法
条带部段切割系统
1.优先权要求
2.本pct申请要求于2019年12月31日提交并且于2020年5月12日发布为韩国专利号10-2109732的韩国专利申请号10-2019-0179254的优先权和权益,该韩国专利申请通过援引以其全文并入本文。
技术领域
3.本披露内容涉及一种用于定位条带部段并从物体中切割这些条带部段的条带部段切割系统。
背景技术:
4.钢、铝和其他金属被制造成相对较薄的片材,这些片材卷绕成又大又重的卷,以用于储存并(稍后)运输给客户。为了防止这些金属卷之一开卷,其制造商通常(并且偶尔通过卷的“眼”)在卷的外圆周表面周围应用几个高度张紧的钢条带部段。在客户可以使用卷之前,必须移除并处置条带部段。条带部段切割系统在卷上自动定位条带部段、切割这些条带部段并将其递送至卷绕机,该卷绕机将条带部段卷绕成相对较小的卷,这些卷被处置或回收。
技术实现要素:
5.本披露内容的各个实施例提供了一种用于定位条带部段并从比如金属卷等物体中切割这些条带部段的条带部段切割系统。
6.本披露内容的该条带部段切割系统的一个实施例包括条带部段切割头,该条带部段切割头包括:框架;第一切割器,该第一切割器由该框架支撑;第一托架,该第一托架可相对于该框架在第一托架原位置与第一托架致动位置之间移动;第一夹具,该第一夹具可枢转地安装至该第一托架并且包括本体,该本体具有夹持头和相反的脚部;第一夹具偏置元件,该第一夹具偏置元件将该第一夹具偏置到第一夹具原位置,在该第一夹具原位置,该第一夹具的夹持头与该第一托架间隔开;第二托架,该第二托架可相对于该框架和该第一切割器在第二托架原位置与第二托架致动位置之间移动;第二切割器,该第二切割器安装至该第二托架并且包括本体,该本体具有提升切割头;以及一个或多个托架致动器,该一个或多个托架致动器可操作地连接至该第一托架和该第二托架并且被配置成将该第一托架和该第二托架相对于彼此从其相应的第一托架原位置和第二托架原位置移动至其相应的第一托架致动位置和第二托架致动位置,在这些原位置,该第一托架和该第二托架分开第一距离,在这些致动位置,该第一托架和该第二托架分开更小的第二距离。
7.一种从物体中移除条带部段的方法的一个实施例包括:将条带部段切割头定位成使得其与该物体间隔开并与该条带部段相邻,其中,该条带部段切割头包括第一切割器;使该条带部段切割头向该物体移动至条带部段切割位置,使得第一夹具的夹持头定位于该条带部段的第一侧上并且第二切割器的提升切割头定位于该条带部段的相反的第二侧上;使
该第一夹具向该条带部段移动,使得该第一夹具夹持该条带部段;以及使该第二切割器向该条带部段移动,使得该第二切割器将该条带部段提升至与该第一切割器接触并且与该第一切割器合作以切割该条带部段。
附图说明
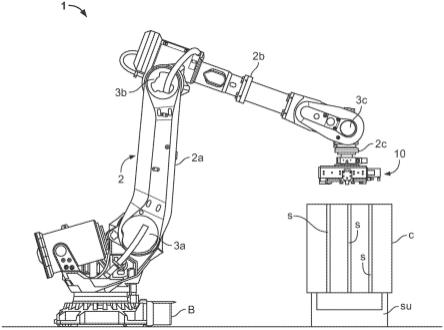
8.图1是本披露内容的条带部段切割系统的一个示例实施例的侧视图。
9.图2是框图,示出了图1的条带部段切割系统的某些部件。
10.图3a和图3b是图1的条带部段切割系统的条带部段切割头的一个示例实施例的立体图。
11.图4是图3a和图3b的条带部段切割头的立体图,其中某些部件被移除以示出第一切割组件。
12.图5a和图5b是图3a和图3b的条带部段切割头的托架致动器、第一夹持组件、第二夹持组件和第二切割组件的立体图。
13.图6a和图6b是图5a和图5b的第一夹持组件的立体图。
14.图7a至图7c是图5a和图5b的第二夹持组件和第二切割组件的立体图。
15.图8a和图8b是图7a至图7c的第二切割组件的第二切割器的立体图。
16.图9a、图10a、图11a、图12a、图13a和图14a是图5a和图5b的托架致动器、第一夹持组件和第二夹持组件、以及第一切割组件和第二切割组件在条带部段切割过程的各个阶段期间的侧视图。
17.图11b、图12b、图13b和图14b是图11a、图12a、图13a和图14a的放大部分,其中为清楚起见移除了卷。
18.图9b、图10b、图11c、图12c、图13c和图14c是与图9a、图10a、图11a、图12a、图13a和图14a的侧视图相反的侧视图。
具体实施方式
19.虽然本文描述的系统、装置和方法可以以各种形式实施,但是附图示出了并且说明书描述了某些示例性且非限制性实施例。可能并非需要附图中示出的和说明书中描述的所有部件,并且某些实现方式可以包括额外的、不同的或更少的部件。在不脱离权利要求的精神或范围的情况下,可以改变部件的布置和类型、部件的形状、尺寸和材料以及部件的连接方式。除非另有说明,否则说明书中提到的任何方向反映了对应的附图中所示的部件的取向,并且不限制本披露内容的范围。此外,涉及安装方法的术语(诸如联接、安装、连接等)不旨在限于直接安装方法,而是应该广义地解释为包括间接的和可操作地联接、安装、连接等安装方法。本说明书旨在被视为整体,并根据本披露内容的原理和如本领域普通技术人员所理解的那样进行解释。
20.图1和图2示出了本披露内容的条带部段切割系统1的一个示例实施例和其部件。条带部段切割系统1被配置成:在物体上定位条带部段s,该物体在此示例实施例中是由支撑件su支撑的金属卷c(尽管该物体在其他实施例中可以是任何其他合适的物体);从卷c切割条带部段s;并将切割的条带部段s递送至卷绕机(未示出)或其他装置以用于进一步处理和处置。条带部段切割系统1包括可铰接机械臂2、多个机械臂致动器4、条带部段切割头10、
条带传感器900、以及控制器1000。
21.机械臂2可操纵以定位条带部段切割头10使得该条带部段切割头可以定位条带部段s并从卷c切割这些条带部段。机械臂2包括可紧固至地板或其他基板的底座b、在枢轴3a处可枢转地连接至底座b的第一臂部段2a、在枢轴3b处可枢转地连接至第一臂部段2a的第二臂部段2b、以及在枢轴3c处可枢转地连接至第二臂部段2b的第三臂部段2c。机械臂致动器4可操作地连接至臂部段2a-2c并且被配置成使臂部段围绕枢轴3a-3c相对于彼此枢转。虽然这里未示出,但机械臂致动器4可操作地连接至第一臂部段2a(以及在其他实施例中第二臂部段2b和/或第三臂部段2c)以使第一臂部段2a围绕竖直轴线枢转,从而实现条带部段切割头10旋转进入和离开页面。在某些实施例中,一个或多个机械臂部段是可伸缩的,使得该一个或多个机械臂部段可以增加或减少其长度。在这些实施例中,机械臂致动器可操作地连接至可伸缩机械臂部段并且被配置成改变其长度。机械臂致动器可以是任何合适的致动器,比如(但不限于)电动、液压和/或气动马达。这仅仅是一个示例机械臂,并且可以采用任何其他合适的机械臂或其他部件来移动条带部段切割头10。
22.条带部段切割头10(其最佳示出在图3a至图14c中)安装至第三臂部段2c的自由端并且被配置成从卷c切割条带部段s。条带部段切割头10包括壳体100(最佳示出在图3a至图4中)、机械臂安装件200(最佳示出在图3a和图3b中)、第一条带紧固器300a和第二条带紧固器300b(最佳示出在图3a和图3b中)、第一切割组件400(最佳示出在图4中)、托架致动器500(最佳示出在图5a和图5b中)、第一夹持组件600(有时称为“第一组件”并且最佳示出在图6a和图6b中)、第二夹持组件700(有时称为“第二组件”并且最佳示出在图7a至图7c中)、以及第二切割组件800(最佳示出在图7a至图8b中)。
23.框架100支撑条带部段切割头10的组件和部件。框架100由附接至彼此的实心构件、管状构件、板、和/或任何其他合适的部件的任何合适的组合形成。机械臂安装件200附接至框架100并且可移除地可附接至机械臂2的第三臂部段2c以将条带部段切割头10可移除地安装至机械臂2。
24.第一条带紧固器300a和第二条带紧固器300b在条带部段切割过程期间抵靠卷c夹持条带部段s。第一条带紧固器300a包括第一壳体310a、第一外夹具320a和第一偏置元件(未示出)。第一壳体310a安装至框架100并且至少部分地包围第一偏置元件和第一外夹具320a。第一偏置元件(其在此示例实施例中是弹簧、但在其他实施例中可以是任何其他合适的偏置元件)将第一外夹具320a偏置到夹持位置(示出在图3a和图3b中)。类似地,第二条带紧固器300b包括第二壳体310b、第二外夹具320b和第二偏置元件(未示出)。第二壳体310b安装至框架100并且至少部分地包围第二偏置元件和第二外夹具320b。第二偏置元件(其在此示例实施例中是弹簧、但在其他实施例中可以是任何其他合适的偏置元件)将第二外夹具320b偏置到夹持位置(示出在图3b中)。在其他实施例中,条带部段切割头包括仅一个条带紧固器,而在另外的实施例中,条带部段切割头不包括任何条带紧固器。
25.第一切割组件400(其最佳示出在图3b和图4中)与第二切割组件800合作,以在第二切割组件800的某些部件相对于第一切割组件400移动时经由剪切动作切割条带部段s,如下文更详细地描述的。第一切割组件400包括第一切割器安装件410、第一切割器420和第一切割器偏置元件430。第一切割器安装件410经由紧固件或以任何其他合适的方式固定地安装至框架100。第一切割器420可滑动地安装至第一切割器安装件410并且相对于条带部
段切割头10的其余组件和部件在原位置(图4)与切割位置(图11c)之间可移动。第一切割器偏置元件430(其在此示例实施例中是弹簧(但在其他实施例中可以是任何其他合适的偏置元件))在框架100与第一切割器420之间延伸并且将第一切割器420偏置到其原位置。第一切割器420包括第一切割边缘420c。
26.第一夹持组件600(其最佳示出在图6a和图6b中)将第一切割器420移动至其切割位置并且与第二夹持组件700合作以在条带部段切割过程期间夹持条带部段s。第一夹持组件600包括第一托架610、安装件614、枢轴销616、第一夹具620、第一夹具偏置元件620s、第二夹具630、第二夹具偏置元件630s、以及第一切割器接合器640。
27.第一夹具620包括本体622,该本体具有夹持头624和相反的脚部626。夹持头624包括上唇缘624u和相反的下唇缘624l,该上唇缘和该下唇缘一起限定口部,该口部的大小被确定成收纳条带部段s(如下文所描述的)。类似地,第二夹具630包括本体632,该本体具有夹持头634和相反的脚部636。夹持头634包括上唇缘634u和相反的下唇缘634l,该上唇缘和该下唇缘一起限定口部,该口部的大小被确定成收纳条带部段s的(如下文所描述的)。
28.安装件614附接至第一托架610的下侧。第一夹具620和第二夹具630经由枢轴销616安装至安装件614,该枢轴销延伸穿过安装件614以及第一夹具620的脚部626和第二夹具630的脚部636中限定的孔洞(未标记)。第一夹具620可围绕枢轴销616并且相对于第一托架610枢转。第一夹具偏置元件620s在安装件614与第一夹具620之间延伸并且将第一夹具620偏置到原位置,在该原位置,夹持头624与安装件614间隔开。第二夹具630可围绕枢轴销616并且相对于第一托架610枢转。第二夹具偏置元件630s在安装件614与第二夹具630之间延伸并且将第二夹具630偏置到原位置,在该原位置,夹持头634与安装件614间隔开。在此示例实施例中,第一夹具620和第二夹具630可独立枢转,而在其他实施例中,第一夹具和第二夹具被配置成使得该第一夹具和该第二夹具枢转成一体。
29.第一切割器接合器640(其在此示例实施例中是板(但在其他实施例中可以是任何其他合适的部件))固定地附接至第一托架610,使得第一切割器接合器640的前沿表面640a面向第一切割器420。
30.第二夹持组件700(其最佳示出在图7a至图7c中)与第一夹持组件600合作以在条带部段切割过程期间夹持条带部段s。第二夹持组件700包括第二托架710、第三夹具托架720、第三夹具安装件722、第三夹具枢轴销726、第三夹具730、第三夹具第一偏置元件730s、以及第三夹具第二偏置元件740。
31.第三夹具730包括本体732,该本体具有夹持头734和相反的脚部736。夹持头734包括上唇缘734u和相反的下唇缘734l,该上唇缘和该下唇缘一起限定口部,该口部的大小被确定成收纳条带部段s(如下文所描述的)。第三夹具安装件722附接至第三夹具托架720的下侧。第三夹具730经由第三夹具枢轴销726安装至第三夹具安装件722,该第三夹具枢轴销延伸穿过第三夹具安装件722中限定的孔洞(未标记)。第三夹具730可围绕第三夹具枢轴销726相对于第三夹具托架720枢转。第三夹具第一偏置元件730s在第三夹具安装件722与第三夹具730之间延伸并且将第三夹具730偏置到原位置,在该原位置,夹持头734与第三夹具安装件722间隔开。
32.第三夹具托架720可滑动地安装至第二托架710并且可相对于第二托架710移动。第三夹具第二偏置元件740(其在此示例实施例中是气弹簧、但在其他实施例中可以是任何
其他合适的偏置元件(比如压缩弹簧))相对于第二托架710将第三夹具托架720偏置到原位置(图7a至图7c)。
33.第二切割组件800安装至第二夹持组件700(以及更具体地,第二托架710)并且与第一切割组件400合作以在条带部段切割过程期间切割条带部段s。第二切割组件800包括第二切割组件安装件812、第二切割组件枢轴销816、第二切割器载体850、第二切割器860、以及第二切割器偏置元件860s。
34.第二切割器载体850具有本体852,该本体具有头部854和相反的脚部856。第二切割器860(最佳示出在图8a和图8b中)具有本体862,该本体在一端具有提升切割头864。提升切割头864终止于其前端处的尖端864t并且包括相对于彼此成角度的平面上表面864a1、864a2和864a3以及相对于彼此成角度的、相反的平面下表面864b1和864b2。上表面864a1限定第二切割边缘864c,该第二切割边缘如下文所描述的与第一切割器420的第一切割边缘420c合作以切割条带部段s。
35.第二切割器托架850经由第二切割组件枢轴销816安装至第二切割组件安装件812,该第二切割组件安装件附接至第二托架710的下侧。第二切割组件枢轴销816延伸穿过第二切割组件安装件812以及第二切割器载体850的脚部856中限定的孔洞(未标记)。第二切割器860可移除地附接至第二切割器载体850的头部854,使得第二切割器860的尖端864t向夹持组件800延伸。第二切割器安装件850(第二切割器860附接至其)可围绕第二切割组件枢轴销816并且相对于第二托架710枢转。第二切割器偏置元件860s在第二切割组件安装件812与第二切割器载体850之间延伸并且将第二切割器载体850偏置到原位置,在该原位置,头部854和第二切割器860与第二切割组件安装件812间隔开。
36.托架致动器500(其最佳示出在图5a和图5b中)可操作地连接至第一托架610和第二托架710并且被配置成使这些托架相对于彼此(以及条带部段切割头10的其他组件和部件)在相应的原位置(图9a)与相应的致动位置(图14a)之间移动以切割条带部段s(如下文所描述的)。第一托架和第二托架在位于其相应的原位置时相隔第一距离并且在位于其相应的致动位置时相隔更小的第二距离(即,更靠近彼此)。托架致动器500可以包括任何合适类型的致动器,比如液压致动器、气动致动器或电动致动器。在此示例实施例中,托架致动器500可滑动地安装至框架100,使得该托架致动器可以相对于框架100移动。在此示例实施例中,托架致动器固定地安装至第一托架610。
37.在其他实施例中,条带部段切割头包括两个托架致动器:一个可操作地连接至第一托架并且被配置成使第一托架在其原位置与致动位置之间移动,并且另一个可操作地连接至第二托架并且被配置成使第二托架在其原位置与致动位置之间移动。
38.条带传感器900包括被配置成检测卷c上的条带部段s的任何合适的传感器,比如(但不限于)激光位移传感器。条带传感器900可以是条带部段切割头10的一部分或与条带部段切割头10分离开,只要条带传感器900被定位和定向成检测条带部段s即可。
39.控制器1000包括通信地连接至存储器装置(或多个存储器装置)的处理装置(或多个处理装置)。例如,控制器可以包括可编程逻辑控制器。处理装置可以包括任何合适的处理装置,比如但不限于通用处理器、专用处理器、数字信号处理器、一个或多个微处理器、与数字信号处理器核心相关联的一个或多个微处理器、一个或多个专用集成电路、一个或多个现场可编程门阵列电路、一个或多个集成电路、和/或状态机。存储器装置可以包括任何
合适的存储器装置,比如但不限于只读存储器、随机存取存储器、一个或多个数字寄存器、缓存存储器、一个或多个半导体存储器装置、比如集成硬盘和/或可移动存储器之类的磁介质、磁光介质和/或光学介质。存储器装置存储有指令,这些指令可由处理装置执行以控制条带部段切割系统1(包括条带部段切割头10)的操作,比如以进行下文关于图9a至图14c所描述的条带部段切割过程。如图2所示,控制器1000通信地并且可操作地连接至机械臂致动器4、托架致动器500和条带传感器900并且被配置成从这些部件接收信号并控制这些部件。
40.现在结合图9a至图14c描述条带部段切割系统10的、用于进行用于从卷c切割条带部段s的条带部段切割过程的操作。最初,如图9a和图9b所示,第一切割器420、第一托架610、第一夹具620和第二夹具630、第二托架710、第三夹具托架720、第三夹具730、以及第二切割器860位于其相应的原位置。
41.控制器1000控制机械臂致动器4操纵机械臂2以使条带部段切割头10移动至与卷c相邻。然后,控制器1000控制机械臂致动器4操纵机械臂2,使得在条带传感器900扫描条带部段s的同时,条带部段切割头10相对于卷c边对边移动。一旦条带传感器900检测到条带部段s,控制器1000就控制机械臂致动器4操纵机械臂2以将条带部段切割头10定位成使得条带部段s位于第一夹持组件600与第二夹持组件700之间并且位于第一条带紧固器300a的第一外夹具320a和第二条带紧固器300b的第二外夹具320b下方。
42.然后,控制器1000控制机械臂致动器4操纵机械臂2以使条带部段切割头10向卷c移动。在这种情况发生时,第一外夹具320a和第二外夹具320b接合卷c并且向条带部段s的各部分施加夹持力以抵靠该卷夹持条带部段s的这些部分。另外,在条带部段切割头10继续向卷c移动时,第一夹具620的头部624、第二夹具630的头部634和第三夹具730的头部734以及第二切割器860的提升切割头864接合卷c并且开始枢转远离其相应的原位置(抵抗由其相应的偏置元件施加的偏置力)。一旦条带部段切割头10到达条带部段切割位置(控制器可以使用传感器或通过监测机械臂致动器4中的一个或多个机械臂致动器上的负载来确定该条带部段切割位置,该传感器感测条带部段切割头10与卷c之间的距离(条带传感器900可以提供此功能,或者可以使用单独的传感器)),控制器1000就控制机械臂致动器4中的一个或多个机械臂致动器停止移动该条带部段切割头。如图10a和图10b所示,当条带部段切割头10位于其条带部段切割位置时,第一夹具620、第二夹具630和第三夹具730以及第二切割器860的提升切割头864与卷c的外表面大体上对准,其中第一夹具620的头部624和第二夹具630的头部634面向条带部段s的一侧,并且第三夹具730的夹持头734和第二切割器860的提升切割头864面向条带部段s的相反侧。
43.控制器1000控制托架致动器500使第一托架610从其原位置向条带部段s移动。第一夹具620的头部624的下唇缘624l和第二夹具630的头部634的下唇缘634l接合条带部段s并且将该条带部段稍微提升至与相应的上唇缘624u和634u接触,使得条带部段s的一侧收纳在第一夹具620和第二夹具630的相应口部中,如图11a和图11b中最佳示出的。在这种情况发生时,第一切割器接合器640的前沿表面640a接合第一切割器420并且使第一切割器420从其原位置移动至其切割位置,如图11c中最佳示出的。在第一切割器420到达其切割位置时,第一托架610到达其致动位置,并且由于框架100阻止了第一切割器420的进一步移动,因此第一切割器接合器640与第一切割器420之间的接合阻止了夹持组件托架610进一步向条带部段s移动。
44.控制器1000控制托架致动器500使第二托架710(其携带第二切割组件800)从其原位置向条带部段s移动,以夹持条带部段s并从卷c切割条带部段s。图12a至图12c示出了刚好在第三夹具730和第二切割器860接触条带部段s之前第二托架710的位置。在第二托架710继续移动时,第三夹具730的夹持头734的下唇缘734l和第二切割器860的提升切割头864的尖端864t接合条带部段s并且将该条带部段稍微提升至与上唇缘734u接触,使得条带部段s的一侧收纳在第三夹具730的口部中,如图13a至图13c中最佳示出的。此时,条带部段s夹持在第一夹具620和第二夹具630(在一侧)以及第三夹具730(在另一侧)之间。
45.第二托架710继续向条带部段s移动,从而使其携带第二切割组件800和第二切割器860。条带部段s以及第一夹具620和第二夹具630阻止第三夹具730继续与第二托架710一起移动,因此第二托架710的继续移动压缩了第三夹具第二偏置元件740,这增加了第三夹具730施加到条带部段s上的夹持力。具体地,夹持力是水平的(由第三夹具第二偏置元件740施加的力引起)和竖直的(由第一夹具、第二夹具和第三夹具的偏置元件以及相应夹持头的几何结构施加的力引起)。在第二切割组件800继续与第二托架710一起移动时,第二切割器860的提升切割头864将条带部段s提升至与第一切割器420的第一切割边缘420c接触。第二切割器860相对于条带部段s继续移动导致第一切割器420的第一切割边缘420c和第二切割器860的第二切割边缘864c经由剪切动作切割条带部段s,如图14a至图14c所示。由于第一条带紧固器300a的第一外夹具320a和第二条带紧固器300b的第二外夹具320b抵靠卷c夹持条带部段s,因此条带部段s的切割端不会在切割之后不受控制地飞离卷c。
46.在第一切割器420和第二切割器860切割条带部段s并且第二托架710到达其致动位置之后,控制器1000控制托架致动器500停止移动第二托架710。此时,第一夹具620、第二夹具630和第三夹具730合作以在彼此之间并且抵靠第二切割器860的头部864的上表面864a1-864a3夹持条带部段s。控制器控制机械臂致动器4操纵机械臂2以将条带部段切割头10(携带有切割的条带部段s)移动至卷绕机。控制器控制托架致动器500以控制第一托架610和/或第二托架710移动回到其相应的原位置。这导致第一夹具、第二夹具和第三夹具730将条带部段s释放到卷绕机中,该卷绕机卷绕条带部段s以供处置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1