一种智能搬运工装机器人的制作方法
1.本发明涉及机器人技术领域,尤其是一种智能搬运工装机器人。
背景技术:
2.机器人是自动控制机器(robot)的俗称,自动控制机器包括一切模拟人类行为或思想与模拟其他生物的机械(如机器狗,机器猫等)。狭义上对机器人的定义还有很多分类法及争议,有些电脑程序甚至也被称为机器人。在当代工业中,机器人指能自动执行任务的人造机器装置,用以取代或协助人类工作。理想中的高仿真机器人是高级整合控制论、机械电子、计算机与人工智能、材料学和仿生学的产物,目前科学界正在向此方向研究开发。
3.现有用于搬运的机器人如专利号为cn201920956143.8一种夹持稳定的智能搬运机器人,属于搬运机器人技术领域。一种夹持稳定的智能搬运机器人,包括安装于搬运机器人顶面的固定座,固定座上端开设有收纳槽,收纳槽内侧成环形等间距开设有四个避让槽,并在收纳槽内设置有与其相匹配的承载台,承载台底面四角处均设置有弹簧a,弹簧a上下两端分别与承载台底面以及收纳槽内侧底面固定连接,承载台下端外侧相对避让槽的位置均开设有转动槽,固定座上端相对避让槽外侧的位置还设置有夹持机构。本发明结构紧凑,利用物流件自身重量达到对其稳定的夹持效果,从而避免智能搬运机器人在移动过程中停止时其上端的物件易随重量势能的惯性而滑落损坏的问题。
4.但是,现有的机器人,由于机器人的抓取结构为纵向固定设置,从而机器人只能进行纵向下落进行夹持,而物体为不规则设置,从而在搬运的时候需要抓取头可以进行一定的浮动,从而更能方便抓取。
技术实现要素:
5.针对现有技术的不足,本发明提供一种智能搬运工装机器人。
6.本发明的技术方案为:一种智能搬运工装机器人,包括支撑座,所述支撑座上方设有转动电机,所述转动电机驱动轴连接第一连接杆,且所述第一连接杆可拆卸连接所述支撑座,所述第一连接杆上方可拆卸连接升降支撑组件,所述升降支撑组件一端下方可拆卸连接浮动调节结构,所述浮动调节结构下端可拆卸连接可拆卸式抓取组件。
7.进一步的,所述升降支撑组件包括第一转动杆,所述第一转动杆贯穿所述第一支撑杆,所述第一转动杆两端可拆卸连接第一连接板,所述第一连接板一端对称设有两个第一连接环,两个所述第一连接环内口可拆卸连接第二转动杆,所述第二转动杆两端可拆卸连接调节板,且一侧所述调节板设有第一驱动电机,所述第一驱动电机驱动轴连接所述第二转动,两个所述第一连接环之间、所述第二转动杆套和连接第二连接板,所述第二连接板一端套和连接第三转动杆,所述第三转动杆两端可拆卸连接第一支撑架,所述调节板两侧设有第一牵引组件和第二牵引组件,所述第一牵引组件和所述第二牵引组件分别可拆卸连接所述第一支撑架和所述第一连接杆。
8.进一步的,所述第一牵引组件包括第二连接杆,所述第二连接杆贯穿所述第一连
接杆,所述第二连接杆两端可拆卸连接两个第二连接环,两个所述第二连接环上端可拆卸连接第一连接条,两个所述第一连接条之间轴承连接第三连接杆,所述第三连接杆套和连接第三连接板,所述第三连接板上端套和连接第四连接杆,所述第四连接杆两端轴承连接第四连接板,所述第四连接板上端轴承连接第四连接杆,所述第四连接杆两端可拆卸连接所述调节板。
9.进一步的,所述第二牵引组件包括第五连接杆,所述第五连接杆两端轴承连接所述调节板,所述第五连接杆外侧套和连接第五连接板,所述第五连接板另一端套和连接第六连接杆,所述第六连接杆可拆卸连接两个第一连接块,两个所述第一连接块可拆卸连接所述第一支撑架。
10.进一步的,所述浮动调节结构包括第一连接球,所述第一支撑架下方设有第六连接板,所述第六连接板下方设有球形槽,所述第一连接球槽和连接于所述球形槽内,所述第一连接球下端可拆卸连接第七连接板,所述第六连接板下方设有多个第二限位孔,多个所述第二限位孔内滑动连接活塞定位销,所述第一连接板外侧设有气孔,所述气孔联通多个第二限位孔,多个所述第二限位孔上端设有电磁阀,且多个所述活塞定位销挤压连接所述第七连接盘。
11.进一步的,所述第一连接球上设有多个第一滑槽,所述第六连接板内设有多个限位孔,多个所述限位孔内均设有电动伸缩杆,多个所述电动伸缩杆分别滑动连接所述限位孔
12.进一步的,所述可拆卸式抓取组件包括第一连接盘,所述第一连接盘上端可拆卸连接所述第七连接板,所述第一连接盘外侧对称设有四个第二滑槽,四个所述第二滑槽内均设有角度调节结构,所述角度调节结构一端可拆卸连接升降组件,所述升降组件可拆卸连接夹板。
13.进一步的,所述角度调节结构包括四个第一气缸,四个所述第一气缸一端分别可拆卸连接两个第八连接板,两个所述第八连接杆被两个第四转动杆,两个所述第四转动杆可拆卸连接所述升降组件。
14.进一步的,所述升降组件包括第一丝杆和第一滑杆,所述夹板内侧设有第三滑槽,所述第一丝杆和第一滑杆分别可拆卸连接于所述第三滑槽内,且所述第三滑槽内设有第二驱动电机,所述第二驱动电机驱动轴连接所述第一丝杆,所述第一丝杆和所述第一滑杆均转动连接第一滑板,两个所述第四转动杆分别可拆卸连接所述第一滑板。
15.进一步的,所述第三滑槽下端、所述夹板上设有第一电磁铁,所述第一连接盘下端设有第二电磁铁,且所述第一电磁铁两侧,所述夹板上对称设有橡胶板。
16.本发明的有益效果为:
17.1.本发明通过在支撑座上设有升降支撑组件,升降支撑架通过第一驱动电机的转动来实现对应的转动和调节,然后,在通过升降支撑架上设有第一牵引组件和第二牵引组件来实现对应的牵引支撑,从而使得整个结构更为的稳定。
18.2.通过在第一支撑架下方设有浮动调节结构,利用第一连接球来进行对应的转动,同时通过活塞定位销来实现气动定位,从而来压力小于一定值的情况下保持结构的稳定,当挤压力较大的时候又可以进行调节,并且可以进行人为控制气动来进行调节,从而达到浮动的效果。
19.3.通过浮动结构下方设有可拆卸式抓取组件,可拆卸式抓取组件通过设置有角度调节结构和升降结构,利用升降结构来调节夹板的长度,在通过设置有角度调节结构来实现夹板可以根据物件进行对应的旋转倾斜,既夹持的效果更为的好。
附图说明
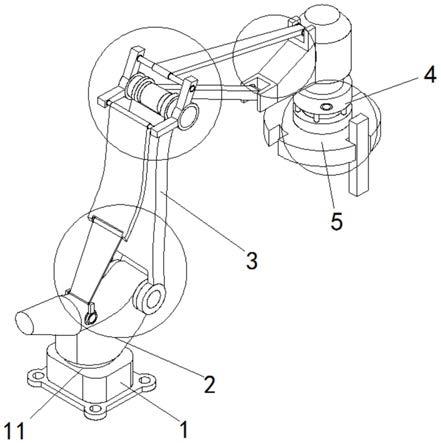
20.图1是本发明外形结构示意图;
21.图2是本发明升降支撑组件结构示意图;
22.图3是本发明第一牵引组件结构示意图;
23.图4是本发明第二牵引组件结构示意图;
24.图5是本发明可拆卸式抓取组件结构示意图;
25.图6是本发明浮动调节结构示意图;
26.图7是本发明升降组件结构示意图。
27.图中:1、支撑座;11、转动电机;2、第一连接杆;3、升降支撑组件;31、第一转动杆;32、第一连接板;321、第一连接环;322、第二转动杆;33、调节板;34、第一驱动电机;35、第二连接板;36、第三转动杆;37、第一支撑架;38、第一牵引组件;381、第二连接杆;382、第二连接环;383、第一连接条;384、第三连接杆;385、第三连接板;386、第四连接杆;387、第四连接板;388、第七连接杆;39、第二牵引组件;391、第五连接杆;392、第五连接板;393、第六连接杆;394、第一连接块;4、浮动调节结构;41、第一连接球;42、第六连接板;421、第二限位孔;422、活塞定位销;423、气孔;424、电磁阀;425、限位孔;43、球形槽;5、可拆卸式抓取组件;51、第一连接盘;52、第二滑槽;53、角度调节结构;53、角度调节结构;531、第一气缸;532、第八连接板;54、升降组件;541、第一丝杆;542、第一滑杆;543、第二驱动电机;544、第一滑板;55、夹板;551、第三滑槽;552、第一电磁铁;553、橡胶板。
具体实施方式
28.下面结合附图对本发明的具体实施方式作进一步说明:
29.实施例,请参考图1
‑
7,一种智能搬运工装机器人,包括支撑座1,所述支撑座1上方设有转动电机11,所述转动电机11驱动轴连接第一连接杆2,且所述第一连接杆2可拆卸连接所述支撑座1,所述第一连接杆2上方可拆卸连接升降支撑组件3,所述升降支撑组件3一端下方可拆卸连接浮动调节结构4,所述浮动调节结构4下端可拆卸连接可拆卸式抓取组件5。
30.请参考图2
‑
4,所述升降支撑组件3包括第一转动杆31,所述第一转动杆31贯穿所述第一连接杆2,所述第一转动杆31两端可拆卸连接第一连接板32,所述第一连接板32一端对称设有两个第一连接环321,两个所述第一连接环321内口可拆卸连接第二转动杆322,所述第二转动杆322两端可拆卸连接调节板33,且一侧所述调节板33设有第一驱动电机34,所述第一驱动电机34驱动轴连接所述第二转动杆322,两个所述第一连接环321之间、所述第二转动杆322套和连接第二连接板35,所述第二连接板35一端套和连接第三转动杆36,所述第三转动杆36两端可拆卸连接第一支撑架37,所述调节板33两侧设有第一牵引组件38和第二牵引组件39,所述第一牵引组件38和所述第二牵引组件39分别可拆卸连接所述第一支撑架37和所述第一连接杆2,所述第一牵引组件38包括第二连接杆381,所述第二连接杆381贯
穿所述第一连接杆2,所述第二连接杆381两端可拆卸连接两个第二连接环382,两个所述第二连接环382上端可拆卸连接第一连接条383,两个所述第一连接条383之间轴承连接第三连接杆384,所述第三连接杆384套和连接第三连接板385,所述第三连接板385上端套和连接第四连接杆386,所述第四连接杆386两端轴承连接第四连接板387,所述第四连接板387上端轴承连接第七连接杆388,所述第七连接杆388两端可拆卸连接所述调节板33,所述第二牵引组件39包括第五连接杆391,所述第五连接杆391两端轴承连接所述调节板33,所述第五连接杆391外侧套和连接第五连接板392,所述第五连接板392另一端套和连接第六连接杆393,所述第六连接杆393可拆卸连接两个第一连接块394,两个所述第一连接块394可拆卸连接所述第一支撑架37。
31.请参考图5
‑
6,所述浮动调节结构4包括第一连接球41,所述第一支撑架37下方设有第六连接板42,所述第六连接板42下方设有球形槽43,所述第一连接球41槽和连接于所述球形槽43内,所述第一连接球41下端可拆卸连接第七连接板44,所述第六连接板42下方设有多个第二限位孔421,多个所述第二限位孔421内滑动连接活塞定位销422,所述第六连接板42外侧设有气孔423,所述气孔423连通多个第二限位孔421,多个所述第二限位孔421上端设有电磁阀424,且多个所述活塞定位销422挤压连接所述第七连接板44,所述第一连接球41上设有多个第一滑槽411,所述第六连接板42内设有多个限位孔425,多个所述限位孔425内均设有电动伸缩杆426,多个所述电动伸缩杆426分别滑动连接所述限位孔425。
32.请参考图6
‑
7,所述可拆卸式抓取组件5包括第一连接盘51,所述第一连接盘51上端可拆卸连接所述第七连接板44,所述第一连接盘51外侧对称设有四个第二滑槽52,四个所述第二滑槽52内均设有角度调节结构53,所述角度调节结构53一端可拆卸连接升降组件54,所述升降组件54可拆卸连接夹板55,所述角度调节结构53包括四个第一气缸531,四个所述第一气缸531一端分别可拆卸连接两个第八连接板532,两个所述第八连接杆532一端贯穿两个第四转动杆533,两个所述第四转动杆533可拆卸连接所述升降组件54,所述升降组件54包括第一丝杆541和第一滑杆542,所述夹板55内侧设有第三滑槽551,所述第一丝杆541和第一滑杆542分别可拆卸连接于所述第三滑槽551内,且所述第三滑槽551内设有第二驱动电机543,所述第二驱动电机543驱动轴连接所述第一丝杆541,所述第一丝杆541和所述第一滑杆542均转动连接第一滑板544,两个所述第四转动杆533分别可拆卸连接所述第一滑板544,所述第三滑槽551下端、所述夹板55上设有第一电磁铁552,所述第一连接盘51下端设有第二电磁铁511,且所述第一电磁铁552两侧,所述夹板55上对称设有橡胶板553。
33.操作原理:当使用的时候,首先通过螺栓将支撑座进行固定,在通过转动电机的转动带动第一连接杆进行对应的转动,从而带动升降支撑组件来进行对应的转动;达到浮动调节结构进行对应转动的效果,同时,调节板在三连接板的牵扯下使得整个结构更为的稳定;
34.然后,在通过第二驱动电机转动带动第二丝杆转动,从而移动组件来进行调节夹板的长度,到达指定的长度后,四个第一气缸根据需求进行控制伸长长度,由于第四转动杆可拆卸连接第一滑板,从而夹持板可以进行对应的倾斜,同时四个所述第一气缸同时伸长来实现四个夹板之间的距离增大的效果。
35.当夹板进行夹持的时候,通过气孔来调节多个活塞定位销内的空气压力,从而来控制活塞定位销下方的第七连接板的平衡,同时利用多个所述电动伸缩杆分别滑动连接所
述限位孔,从而来加固控制第一连接球的转动。
36.上述实施例和说明书中描述的只是说明本发明的原理和最佳实施例,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1