一种玻璃自动码垛机的制作方法
1.本发明涉及机器人领域,具体涉及到一种玻璃自动码垛机。
背景技术:
2.随着社会不断发展,玻璃的产量和使用量也年年增加,玻璃具有广泛的用途及广阔的市场前景,主要应用在高档建筑、高档玻璃加工和太阳能光电幕墙等领域,通过机器人配合对玻璃进行搬运码垛,在对玻璃进行码垛时,需要改进的地方:
3.在进行使用玻璃码垛机时,通过码垛机将玻璃进行吸附移动到使用的位置上,在码垛玻璃时,都是将几片玻璃直接堆叠在一起,由于多块玻璃之间有一定的吸力,使得多块玻璃会直接紧贴在一起,在输送到码垛位置后,工作人员需要对玻璃进行一一分离,降低玻璃的码垛效果,且码垛玻璃时,大部分只对玻璃两侧进行支撑,玻璃的中间位置无支撑,受力过重后会向中间弯折断裂,导致玻璃易出现破碎损坏现象。
技术实现要素:
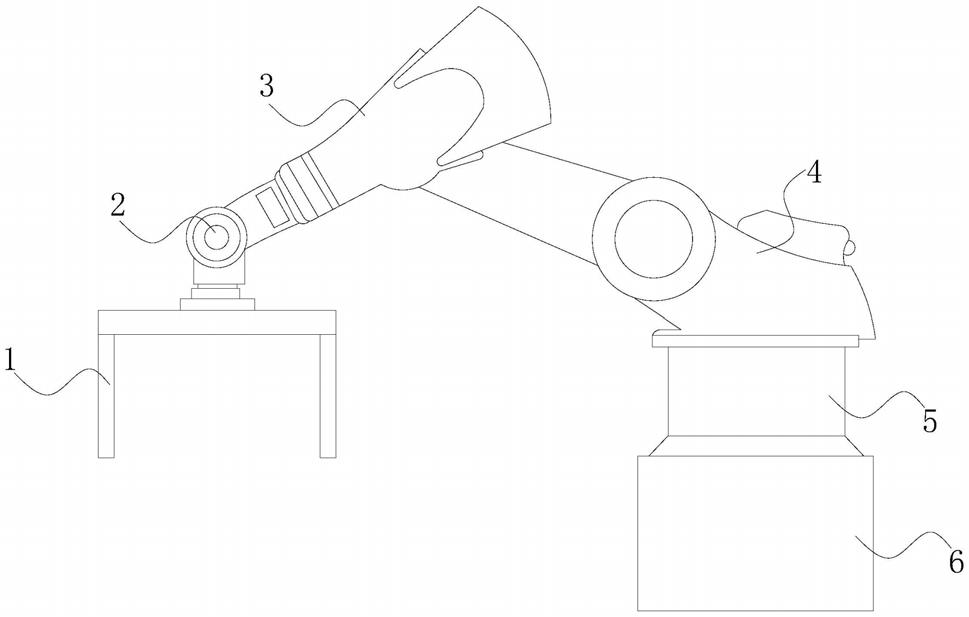
4.针对现有技术存在的不足,本发明是通过如下的技术方案来实现:一种玻璃自动码垛机,其结构包括分隔装置、旋转轴、机械臂、主体、旋转台、底座,所述分隔装置固定连接在旋转轴上,所述旋转轴与机械臂活动卡合,所述机械臂与主体连为一体,所述主体远离机械臂的一端与旋转台镶嵌合,所述旋转台与底座活动卡合。
5.作为发明内容的进一步优化,所述分隔装置包括有辅助撑件、匀力件、衔接杆、框体、分离组件,所述辅助撑件设有六个,六个辅助撑件等距横向连接在框体中间位置上,所述辅助撑件两侧均设有与之相接的匀力件,所述匀力件远离辅助撑件的一端与衔接杆相接,两根所述衔接杆朝向匀力件的一端上均设有六个分离组件且两者固定连接,所述分离组件通过匀力件与辅助撑件相接,所述框体固定连接在旋转轴上。
6.作为发明内容的进一步优化,所述分离组件包括有接头、卡接板、充气腔、伸缩条、收卷轮、拉绳、卡夹,所述接头设有两个,两个接头均与拉绳相连接,所述拉绳远离接头的一端与收卷轮相连接,所述收卷轮通过接头与拉绳相接,两个所述接头分别连接在卡接板和卡夹上,所述卡接板内壁两侧均设有充气腔,所述充气腔远离卡接板的一端与卡夹相接,所述卡夹两侧均连接有伸缩条,所述伸缩条与卡接板相连接,所述卡接板与衔接杆固定连接,所述卡夹通过匀力件与辅助撑件相接。
7.作为发明内容的进一步优化,所述充气腔包括有腔体、导气板、气囊,所述腔体上设有与之相扣接的导气板,所述导气板与气囊相接通,所述气囊安装在腔体内部,所述腔体一端与卡接板相连接,另一端与卡夹相接。
8.作为发明内容的进一步优化,所述卡夹包括有铰链、气孔、夹板、橡胶球、缩放垫,所述铰链两端分别连接在两块夹板上,所述夹板上设有与之相贴合的缩放垫,所述缩放垫上设有气孔,所述缩放垫上远离夹板的一端连接有五个橡胶球,五个橡胶球等距环形连接在缩放垫上,所述夹板与接头相连接,所述夹板两侧均连接有伸缩条,所述夹板通过匀力件
与辅助撑件相接,所述夹板与腔体相连接。
9.作为发明内容的进一步优化,所述辅助撑件包括有接口、牵制带、卡护接块、移动滚件、固定轴,所述接口内壁两侧均安装有移动滚件,所述移动滚件通过接口与牵制带相连接,所述牵制带远离移动滚件的一端与固定轴相连接,所述固定轴与卡护接块活动卡合,所述卡护接块通过匀力件与夹板相接,所述接口设在框体上。
10.作为发明内容的进一步优化,所述移动滚件包括有珍珠棉垫、转轴、联动板、转轮,所述珍珠棉垫紧贴在转轮外壁,所述转轮与转轴活动卡合,所述转轴安装在联动板上,所述联动板通过接口与牵制带相连接。
11.作为发明内容的进一步优化,所述卡护接块包括有壳体、固定杆、防护件、弹性胶垫、吸盘,所述壳体内壁设有与之镶嵌固的固定杆,所述固定杆与壳体均连接在固定轴上,所述壳体上设有与之相贴合的防护件,所述防护件远离壳体的一端与弹性胶垫相接,所述弹性胶垫设有两块,两块弹性胶垫上均设有吸盘,所述壳体通过匀力件与夹板相接。
12.作为发明内容的进一步优化,所述防护件包括有软胶片、连接板、延伸带、弹动球,所述软胶片设在连接板上,所述软胶片与连接板之间设有弹动球,所述弹动球与延伸带相连接,所述弹动球两端与软胶片和连接板内壁相接触,所述连接板贴合在壳体上,所述软胶片与弹性胶垫相接。
13.有益效果
14.本发明一种玻璃自动码垛机,具有以下有益效果:
15.1、本发明通过腔体、导气板、气囊,腔体内部的气体在受到外部的重力后会挤压撞击而分解,使得气体的气压变高,变高后的气压的快速流动到导气板上,导气板与气囊相通,将腔体内部的气体传送到气囊内部,腔体内部接收到气体后会扩张开而祈起到支撑作用。
16.2、本发明通过铰链、气孔、夹板、橡胶球、缩放垫,玻璃平行伸到两块夹板之间,铰链接触到玻璃后会向内回缩,将两块夹板向内牵拉回,使得橡胶球会接触在玻璃上,对玻璃进行卡持定位。
17.3、本发明通过珍珠棉垫、转轴、联动板、转轮,玻璃在进行移动会接触到转轮,转轮在转轴的作用下会进行顺时针转动,有助于将玻璃平行导出,再通过珍珠棉垫对玻璃进行保护,防止玻璃在移动过程中出现划痕。
附图说明
18.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
19.图1为本发明一种玻璃自动码垛机的结构示意图;
20.图2为本发明分隔装置的内部结构示意图。
21.图3为本发明分离组件的剖面结构示意图。
22.图4为图3中a的放大结构示意图。
23.图5为本发明卡夹的剖面结构示意图。
24.图6为本发明辅助撑件的侧视结构示意图。
25.图7为图6中b的放大本发明的结构示意图。
26.图8为本发明卡护接块的剖面结构示意图。
27.图9为本发明防护件的剖面结构示意图。
28.图中:分隔装置
‑
1、旋转轴
‑
2、机械臂
‑
3、主体
‑
4、旋转台
‑
5、底座
‑
6、辅助撑件
‑
11、匀力件
‑
12、衔接杆
‑
13、框体
‑
14、分离组件
‑
15、接头
‑
151、卡接板
‑
152、充气腔
‑
153、伸缩条
‑
154、收卷轮
‑
155、拉绳
‑
156、卡夹
‑
157、腔体
‑
531、导气板
‑
532、气囊
‑
533、铰链
‑
571、气孔
‑
572、夹板
‑
573、橡胶球
‑
574、缩放垫
‑
575、接口
‑
111、牵制带
‑
112、卡护接块
‑
113、移动滚件
‑
114、固定轴
‑
115、珍珠棉垫
‑
141、转轴
‑
142、联动板
‑
143、转轮
‑
144、壳体
‑
131、固定杆
‑
132、防护件
‑
133、弹性胶垫
‑
134、吸盘
‑
135、软胶片
‑
v1、连接板
‑
v2、延伸带
‑
v3、弹动球
‑
v4。
具体实施方式
29.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
30.实施例一
31.请参阅图1,本发明提供一种技术方案:一种玻璃自动码垛机,其结构包括分隔装置1、旋转轴2、机械臂3、主体4、旋转台5、底座6,所述分隔装置1固定连接在旋转轴2上,所述旋转轴2与机械臂3活动卡合,所述机械臂3与主体4连为一体,所述主体4远离机械臂3的一端与旋转台5镶嵌合,所述旋转台5与底座6活动卡合。
32.请参阅图2,所述分隔装置1包括有辅助撑件11、匀力件12、衔接杆13、框体14、分离组件15,所述辅助撑件11设有六个,六个辅助撑件11等距横向连接在框体14中间位置上,所述辅助撑件11两侧均设有与之相接的匀力件12,所述匀力件12远离辅助撑件11的一端与衔接杆13相接,两根所述衔接杆13朝向匀力件12的一端上均设有六个分离组件15且两者固定连接,所述分离组件15通过匀力件12与辅助撑件11相接,所述框体14固定连接在旋转轴2上。
33.请参阅图3,所述分离组件15包括有接头151、卡接板152、充气腔153、伸缩条154、收卷轮155、拉绳156、卡夹157,所述接头151设有两个,两个接头151均与拉绳156相连接,所述拉绳156远离接头151的一端与收卷轮155相连接,所述收卷轮155通过接头151与拉绳156相接,两个所述接头151分别连接在卡接板152和卡夹157上,所述卡接板152内壁两侧均设有充气腔153,所述充气腔153远离卡接板152的一端与卡夹157相接,所述卡夹157两侧均连接有伸缩条154,所述伸缩条154与卡接板152相连接,所述卡接板152与衔接杆13固定连接,所述卡夹157通过匀力件12与辅助撑件11相接。
34.上述的伸缩条154是用于配合卡夹157,卡夹157两侧均连接着伸缩条154,伸缩条154采用弹性材料制成,使卡夹157在进行张合活动,伸缩条154会随之活动调整,有助于卡夹157对玻璃进行卡持定位。
35.请参阅图4,所述充气腔153包括有腔体531、导气板532、气囊533,所述腔体531上设有与之相扣接的导气板532,所述导气板532与气囊533相接通,所述气囊533安装在腔体531内部,所述腔体531一端与卡接板152相连接,另一端与卡夹157相接。
36.上述的气囊533是用于配合卡夹157,卡夹157在卡持玻璃时,会因为玻璃的内推力而向内活动,通过气囊533对卡夹157进行定位支撑,使得卡夹157在夹持玻璃时不会出现脱扣现象。
37.请参阅图5,所述卡夹157包括有铰链571、气孔572、夹板573、橡胶球574、缩放垫575,所述铰链571两端分别连接在两块夹板573上,所述夹板573上设有与之相贴合的缩放垫575,所述缩放垫575上设有气孔572,所述缩放垫575上远离夹板573的一端连接有五个橡胶球574,五个橡胶球574等距环形连接在缩放垫575上,所述夹板573与接头151相连接,所述夹板573两侧均连接有伸缩条154,所述夹板573通过匀力件12与辅助撑件11相接,所述夹板573与腔体531相连接。
38.上述的气孔572是用于配合缩放垫575,夹板573夹持在玻璃两侧上,缩放垫575受到玻璃的推力会向内回缩,其内部的气体会通过气孔572进行循环流动,有效缓解夹板573对玻璃的压力,对玻璃进行保护。
39.实施例二
40.请参阅图1,本发明提供一种技术方案:一种玻璃自动码垛机,其结构包括分隔装置1、旋转轴2、机械臂3、主体4、旋转台5、底座6,所述分隔装置1固定连接在旋转轴2上,所述旋转轴2与机械臂3活动卡合,所述机械臂3与主体4连为一体,所述主体4远离机械臂3的一端与旋转台5镶嵌合,所述旋转台5与底座6活动卡合。
41.请参阅图2,所述分隔装置1包括有辅助撑件11、匀力件12、衔接杆13、框体14、分离组件15,所述辅助撑件11设有六个,六个辅助撑件11等距横向连接在框体14中间位置上,所述辅助撑件11两侧均设有与之相接的匀力件12,所述匀力件12远离辅助撑件11的一端与衔接杆13相接,两根所述衔接杆13朝向匀力件12的一端上均设有六个分离组件15且两者固定连接,所述分离组件15通过匀力件12与辅助撑件11相接,所述框体14固定连接在旋转轴2上。
42.请参阅图6,所述辅助撑件11包括有接口111、牵制带112、卡护接块113、移动滚件114、固定轴115,所述接口111内壁两侧均安装有移动滚件114,所述移动滚件114通过接口111与牵制带112相连接,所述牵制带112远离移动滚件114的一端与固定轴115相连接,所述固定轴115与卡护接块113活动卡合,所述卡护接块113通过匀力件12与夹板573相接,所述接口111设在框体14上。
43.请参阅图7,所述移动滚件114包括有珍珠棉垫141、转轴142、联动板143、转轮144,所述珍珠棉垫141紧贴在转轮144外壁,所述转轮144与转轴142活动卡合,所述转轴142安装在联动板143上,所述联动板143通过接口111与牵制带112相连接。
44.上述的联动板143是用于配合转轮144,玻璃在进行移动会直接接触到转轮144上,多个转轮144会在联动板143上进行统一方向转动,提高玻璃的码垛效率。
45.请参阅图8,所述卡护接块113包括有壳体131、固定杆132、防护件133、弹性胶垫134、吸盘135,所述壳体131内壁设有与之镶嵌固的固定杆132,所述固定杆132与壳体131均连接在固定轴115上,所述壳体131上设有与之相贴合的防护件133,所述防护件133远离壳体131的一端与弹性胶垫134相接,所述弹性胶垫134设有两块,两块弹性胶垫134上均设有吸盘135,所述壳体131通过匀力件12与夹板573相接。
46.上述的弹性胶垫134是用于配合吸盘135,吸盘135接触在玻璃上,会产生一定的冲击力,吸盘135将冲击力向下传送到弹性胶垫134上,弹性胶垫134具有一定的缓冲作用,将吸盘135与玻璃之间产生的冲击力进行吸能缓解,对玻璃进行保护。
47.请参阅图9,所述防护件133包括有软胶片v1、连接板v2、延伸带v3、弹动球v4,所述
软胶片v1设在连接板v2上,所述软胶片v1与连接板v2之间设有弹动球v4,所述弹动球v4与延伸带v3相连接,所述弹动球v4两端与软胶片v1和连接板v2内壁相接触,所述连接板v2贴合在壳体131上,所述软胶片v1与弹性胶垫134相接。
48.上述的弹动球v4是用于配合软胶片v1,软胶片v1会在吸盘135的作用下平贴在玻璃上,使得软胶片v1可以紧贴在玻璃上,使得固定杆132可以稳定对玻璃的中间位置进行支撑。
49.下面对上述技术方案中的工作原理作如下说明:
50.本发明在进行使用时,通过旋转台5将主体4移动到玻璃的位置上,对机械臂3的位置进行调整,将多块玻璃平行稳定的装在分隔装置1上,再通过机械臂3将玻璃移动到码垛位置上,将玻璃稳定的堆叠码垛。
51.在进行使用玻璃码垛机时,工作人员将多块平行连接到接口111上,玻璃伸入接口111上会与转轮144相接触,接口111两端的多个转轮144会在转轴142的作用下同时进行转动,用珍珠棉垫141对玻璃进行保护,防止玻璃在移动过程中出现划痕,通过转轮144配合玻璃向内活动输送,当玻璃的中间位置移动接触到接口111,使得接口111的两端受力均匀,玻璃在移动过程中,牵制带112会对固定轴115向内牵制,固定轴115在牵制带112的作用下将固定杆132向内牵制,两根固定杆132受力后会向内活动呈平行状态,吸盘135会在固定杆132移动的作用下接触到玻璃上,对玻璃进行定位吸附,通过弹性胶垫134对吸盘135接触撞击在玻璃上的冲击力进行吸能处理,防止玻璃受到重力而损坏,再通过软胶片v1辅助吸盘135进行吸紧玻璃,软胶片v1会在吸盘135的作用下平贴在玻璃上,再通过多个大小不一的弹动球v4对软胶片v1进行同时支撑,使得软胶片v1可以紧贴在玻璃上,使得固定杆132可以稳定对玻璃的中间位置进行支撑,对玻璃的重力紧张分散,防止玻璃的中间位置无支撑而弯折断裂,对玻璃进行保护。
52.在码垛玻璃时,玻璃的中间位置会接触在辅助撑件11上,通过匀力件12配合辅助撑件11玻璃的重力进行分散,玻璃的两端会连接在两块夹板573之间,玻璃的侧边会接触到铰链571,铰链571在接触到玻璃后会向内凹陷,将两块夹板573向内牵制,通过两块夹板573上的橡胶球574对玻璃的两侧进行同时夹持,玻璃与橡胶球574之间会产生一定的摩擦阻力,通过气孔572与缩放垫575互相配合橡胶球574活动,可以稳定对玻璃进行定位,夹板573在接触到玻璃后会向内收缩向下凹陷,将接触到玻璃的重力向下导送,收卷轮155会进行转动,将两条拉绳156同时向内牵制收回,使得两块接头151会内部回缩,接头151回缩后气体会向两侧扩散传送到腔体531上,通过导气板532气体将受压的气体快速的输送到气囊533内部,气囊533充气后会膨胀扩开,有效配合伸缩条154对两块夹板573向内推,使得夹板573可以稳定的夹持在玻璃两侧上,通过多个夹板573对多块玻璃进行分隔开,使得玻璃不会堆叠吸附在一起,无需工作人员在对玻璃进行一一分离,可以将玻璃进行快速码垛,提高玻璃的码垛效果。
53.综上所述,本发明采用分隔装置、旋转轴、机械臂、主体、旋转台、底座的结合设置形成新的玻璃自动码垛机,通过多个大小不一的弹动球对软胶片进行同时支撑,使得软胶片与吸盘可以稳定配合固定杆对玻璃的中间位置进行支撑,防止玻璃的中间位置无支撑而弯折断裂,再通过气囊与伸缩条配合对两块夹板向内推,使得夹板可以稳定的夹持在玻璃两侧上,通过多个夹板对多块玻璃进行分隔开,使得玻璃不会堆叠吸附在一起,提高玻璃的
码垛效果。
54.以上显示和描述了本发明的基本原理和主要特征和本发明的优点,对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
55.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1