一种基于视觉识别的垃圾分类方法、系统及设备与流程
1.本发明涉及垃圾分类技术领域,具体为一种基于视觉识别的垃圾分类方法、系统及设备。
背景技术:
2.垃圾分类是指按照垃圾的不同成分、属性、利用价值以及对环境的影响,并根据不同处理方式的要求,分成属性不同的若干种类。通俗的讲,垃圾分类就是在源头将垃圾分类投放。
3.随着社会的发展,生活垃圾减量化、资源化、无害化处理已经势在必行,而垃圾处理科学化的前提条件是垃圾必须分类收集,这样才能使垃圾处理科学有效地运行,才能使回收可利用资源、降低成本、减少土地消耗成为现实,才能体现社会、经济、生态三方面的效益。因此如何通过垃圾分类管理,最大限度地实现垃圾资源利用,减少垃圾处置量,改善生存环境质量,是当前世界各国共同关注的问题之一。
4.根据国家制定的统一标准,现在生活垃圾被广泛地分为四类,分别是可回收物、有害垃圾、湿垃圾、干垃圾。可回收物是指适宜回收和资源化利用的生活垃圾,包括纸类、塑料、金属、玻璃、木料、织物和电子废弃物。有害垃圾是指对人体健康或者自然环境造成直接或潜在危害的生活垃圾,包括废电池、废弃药品、废杀虫剂、废水银产品等。湿垃圾,是指餐饮垃圾、厨余垃圾及废弃食用油脂和集贸市场有机垃圾等易腐蚀性垃圾,包括废弃的食品、蔬菜、瓜果皮核以及家庭产生的花草、落叶等。干垃圾,即其他垃圾,是指除可回收物、有害垃圾、湿垃圾以外的其他生活废弃物。包括砖瓦陶瓷、普通一次性电池(碱性电池)、受污染的一次性餐盒、卫生间废纸等。
5.然而, 现有的垃圾箱功能仅限于两种分类,即可回收垃圾和不可回收垃圾,并没有很好的起到将垃圾分类的作用。另一方面,现有垃圾箱需人们先对垃圾进行识别,然后再投入相应的分类箱内,由于忘了识别、懒得识别或无法识别等原因,人们经常不作识别便直接将垃圾随意丢入垃圾桶,造成现有垃圾箱的分类功能形同虚设。再加上目前垃圾被更为细致地分为了可回收物、有害垃圾、湿垃圾、干垃圾四类,由于大部分人缺乏垃圾分类的全面知识,更加无法准确记住并判断复杂繁多的垃圾究竞属于何种类型,来对应准确分类投放丢弃,给城市环境和垃圾处理造成了很大压力。
技术实现要素:
6.本发明的目的在于提供一种基于视觉识别的垃圾分类方法、系统及设备,以解决上述背景技术中提出的问题。
7.为实现上述目的,本发明提供如下技术方案:一种基于视觉识别的垃圾分类方法、系统及设备,包括机体、箱体及爪体,其特征在于,所述机体的底端与自转电机的顶端固定连接,所述自转电机的底端与支杆的顶端传动连接,所述支杆的中间部位与箱体固定连接,所述支杆的底端与所述底板的顶端固定连
接,所述箱体的内部等间隔与隔板的两侧固定连接,所述箱体的底端与底盖的顶端活动连接,所述机体的底端一侧与智能设备装置的顶端固定连接,所述机体的一侧与气压伸缩杆的一端固定连接,所述气压伸缩杆的另一端与夹持块的一侧固定连接,所述气压伸缩杆的顶端一侧与气管的一端管道连接,所述气管的另一端与所述机体固定连接,所述夹持块的两侧分别与驱动电机的一端固定连接,所述夹持块的内部安装有滚轮,所述滚轮的两侧分别与所述驱动电机传动连接,所述滚轮的底端安装有绳索,所述绳索的顶端与所述滚轮固定连接,所述绳索的底端与微型气泵的顶端中间部位固定连接,所述微型气泵的底端两侧分别与爪体的顶端活动连接,所述爪体的两侧与微型气压杆的底端管道连接,所述微型气压杆的顶端与所述微型气泵的两侧管道连接,所述箱体的一侧底端与临时储存箱的一端固定连接。
8.作为本发明的进一步方案,所述底板与地面之间通过螺丝固定连接。
9.作为本发明的进一步方案,所述机体的内部安装有蓄电池,且蓄电池与所述智能识别装置电性连接。
10.作为本发明的进一步方案,所述机体的内部设有气压泵,且气压泵与所述伸缩气压杆管道连接。
11.作为本发明的进一步方案,所述驱动电机及自转电机分别与电源电性连接。
12.与现有技术相比,本发明的有益效果为:本发明的爪体可以对临时储存箱中的垃圾进行抓取,之后交由智能识别装置进行鉴别垃圾种类,自转电机带动垃圾至预定区间上方,最后垃圾被投入垃圾箱的分类区间中。该装置可自动进行垃圾分类作业,节省环保人士的工作时间,提高了工作效率。
附图说明
13.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
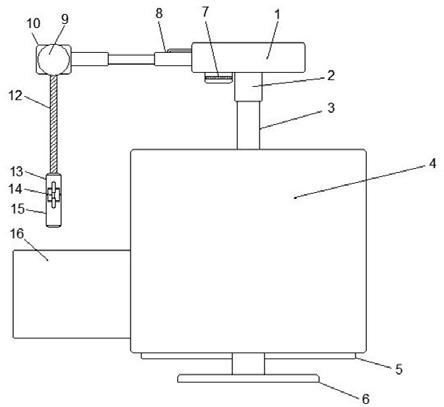
14.图1是根据该发明的一种基于视觉识别的垃圾分类方法、系统及设备的整体侧视示意图;图2是根据该发明的一种基于视觉识别的垃圾分类方法、系统及设备的整体俯视示意图。
15.附图中,各标号所代表的部件列表如下:1、机体;2、自转电机;3、支杆;4、箱体;5、底盖;6、底板;7、智能识别装置;8、气压伸缩杆;9、驱动电机;10、夹持块;11、滚轮;12、绳索;13、微型气泵;14、微型气压杆;15、爪体;16、临时储存箱;17、气管;18、隔板。
具体实施方式
16.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它
实施例,都属于本发明保护的范围。
17.请参阅图1
‑
2,根据本发明实施例的一种基于视觉识别的垃圾分类方法、系统及设备,包括机体1、箱体4及爪体15,其特征在于,所述机体1的底端与自转电机2的顶端固定连接,所述自转电机2的底端与支杆3的顶端传动连接,所述支杆3的中间部位与箱体4固定连接,所述支杆3的底端与所述底板6的顶端固定连接,所述箱体5的内部等间隔与隔板18的两侧固定连接,所述箱体4的底端与底盖5的顶端活动连接,所述机体1的底端一侧与智能设备装置7的顶端固定连接,所述机体1的一侧与气压伸缩杆8的一端固定连接,所述气压伸缩杆8的另一端与夹持块10的一侧固定连接,所述气压伸缩杆8的顶端一侧与气管17的一端管道连接,所述气管17的另一端与所述机体1固定连接,所述夹持块10的两侧分别与驱动电机9的一端固定连接,所述夹持块10的内部安装有滚轮11,所述滚轮11的两侧分别与所述驱动电机9传动连接,所述滚轮11的底端安装有绳索12,所述绳索12的顶端与所述滚轮11固定连接,所述绳索12的底端与微型气泵13的顶端中间部位固定连接,所述微型气泵13的底端两侧分别与爪体15的顶端活动连接,所述爪体15的两侧与微型气压杆14的底端管道连接,所述微型气压杆14的顶端与所述微型气泵13的两侧管道连接,所述箱体4的一侧底端与临时储存箱16的一端固定连接。
18.通过本发明的上述方案,所述底板6与地面之间通过螺丝固定连接,所述机体1的内部安装有蓄电池,且蓄电池与所述智能识别装置7电性连接,所述机体1的内部设有气压泵,且气压泵与所述伸缩气压杆8管道连接,所述驱动电机9及自转电机2分别与电源电性连接。
19.工作原理:居民把垃圾投入临时储存箱16中,驱动电机9电动带动绳索12开始升降,之后微型气压杆14工作,让爪体15抓取垃圾,接着驱动电机9带动绳索12把垃圾提起。伸缩气压杆8收缩,智能识别装置7对垃圾进行识别分裂,然后自转电机2带动垃圾转至预定的分类区间上方,爪体15打开,垃圾被投入箱体4中。底盖5可以打开便于工作人员对其进行清洗。
20.以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1