取放货方法、装置、货叉组件、机器人及存储介质与流程
本公开涉及智能仓储,尤其涉及一种取放货方法、装置、货叉组件、机器人及存储介质。
背景技术:
1、基于机器人的智能仓储系统采用智能操作系统,通过系统指令实现货箱的自动取出和存放,同时可以24小时不间断运行,代替了人工管理和操作,提高了仓储的效率,受到了广泛地应用和青睐。
2、在基于机器人进行货架上的货物的提取或存放时,现有技术往往仅基于相应的指令移动至目标库位,从而直接执行该目标库位对应的取放货操作,机器人在取放货操作时容易发生意外,造成取放货失败,导致取放货操作的安全性较差。
技术实现思路
1、本公开提供一种取放货方法、装置、货叉组件、机器人及存储介质,在放货之前,基于机器人货叉组件上设置的第一传感器和第二传感器进行库位检测,实现了货叉组件与目标库位的自动校准,提高了取放货的安全性。
2、第一方面,本公开实施例提供了一种取放货方法,所述方法应用于机器人,所述机器人的货叉组件货叉组件上设置有第一传感器和第二传感器,所述方法包括:
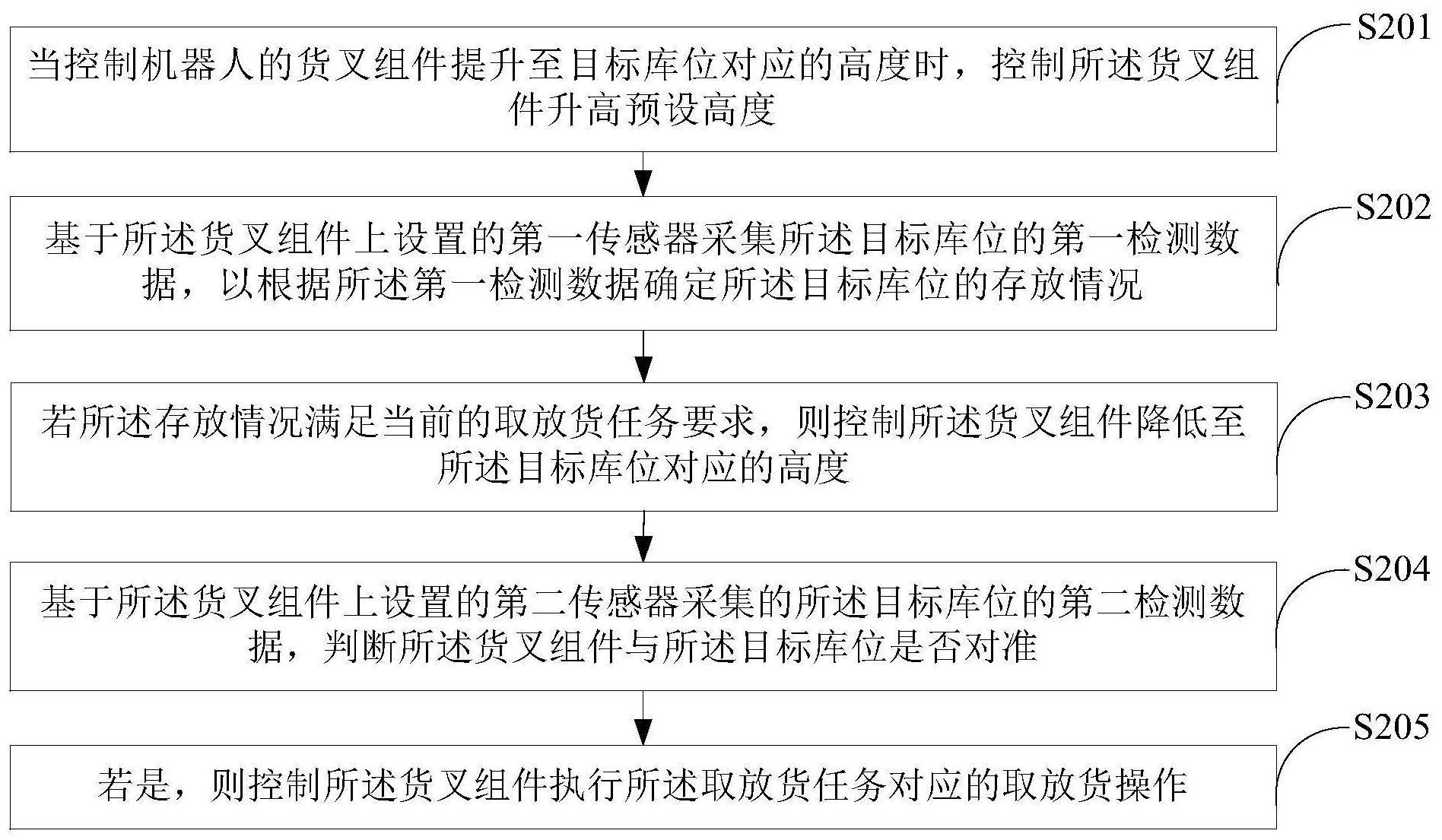
3、当控制机器人的货叉组件提升至目标库位对应的高度时,控制所述货叉组件升高预设高度;基于所述货叉组件上设置的第一传感器采集所述目标库位的第一检测数据,以根据所述第一检测数据确定所述目标库位的存放情况;若所述存放情况满足当前的取放货任务要求,则控制所述货叉组件降低至所述目标库位对应的高度,并基于所述货叉组件上设置的第二传感器采集的所述目标库位的第二检测数据,判断所述货叉组件与所述目标库位是否对准;若是,则控制所述货叉组件执行取放货任务对应的取放货操作。
4、可选的,根据所述第一检测数据确定所述目标库位的存放情况,包括:
5、获取预先训练的预设网络模型;将所述第一检测数据输入所述预设网络模型,并基于所述预设网络模型的输出确定所述目标库位的存放情况。
6、可选的,所述第一传感器为3d相机,所述第一检测数据为所述3d相机采集的点云数据,根据所述第一检测数据判断所述目标库位上是否存在货物,包括:
7、根据所述点云数据的三维坐标和纹理信息,确定所述目标库位的存放情况。
8、可选的,所述第一传感器为激光传感器阵列,根据所述第一检测数据判断所述目标库位上是否存在货物,包括:
9、根据所述激光传感器阵列中各个激光传感器采集的所述目标库位反射的激光信号的强度,确定所述目标库位的存放情况。
10、可选的,当所述取放货任务为取货任务时,所述存放情况满足当前的取放货任务要求,包括:所述存放情况为所述目标库位上存在货物;相应的,控制所述货叉组件执行取放货任务对应的取放货操作,包括:
11、控制所述货叉组件提取所述目标库位上放置的货物。
12、可选的,当所述取放货任务为放货任务时,所述存放情况满足当前的取放货任务要求,包括:所述存放情况为所述目标库位上不存在货物;相应的,制所述货叉组件执行取放货任务对应的取放货操作,包括:
13、控制所述货叉组件将目标货物放置于所述目标库位,其中,所述目标货物为所述放货任务中对应的货物。
14、可选的,当所述取放货任务为放货任务,所述存放情况为所述目标库位上存在货物时,所述方法还包括:
15、生成第一提示信息,以获取新的目标库位。
16、可选的,当所述取放货任务为取货任务,所述存放情况为所述目标库位上不存在货物时,所述方法还包括:
17、生成第二提示信息,以更新取货任务。
18、可选的,所述目标库位上设置有支撑部,所述支撑部包括同高度水平以协同进行货物仓储的第一支撑部和第二支撑部。
19、相应的,控制所述货叉组件将目标货物放置于所述目标库位,包括:
20、控制所述货叉组件的货叉面板伸出,以使所述货叉组件的货叉面板位于所述支撑部的上方;控制所述货叉组件下降,以使所述货叉面板位于第一支撑部和所述第二支撑部之间,以将所述货叉组件上放置的所述目标货物放置于所述目标库位。
21、相应的,控制所述货叉组件提取所述目标库位上放置的货物,包括:
22、控制所述货叉组件的货叉面板伸出,以使所述货叉组件的货叉面板位于所述支撑部的下方;控制所述货叉组件上升,以使所述货叉面板位于第一支撑部和所述第二支撑部之间,以提取所述目标库位上放置的所述目标货物。
23、可选的,基于所述货叉组件上设置的第二传感器采集的所述目标库位的第二检测数据,判断所述货叉组件与所述目标库位是否对准,包括:
24、基于与所述第一支撑部对应的所述第二传感器,采集所述第一支撑部对应的第二检测数据;基于与所述第二支撑部对应的所述第二传感器,采集所述第二支撑部对应的第二检测数据;基于所述第一支撑部对应的第二检测数据,确定所述货叉组件与所述第一支撑部的第一位姿关系;基于所述第二支撑部对应的第二检测数据,确定所述货叉组件与所述第二支撑部的第二位姿关系;根据所述第一位姿关系和所述第二位姿关系,判断所述货叉组件与所述目标库位是否对准。
25、可选的,所述第一位姿关系包括所述第一支撑部与所述货叉组件的第一旋转角度以及在取放货方向的第一距离,所述第二位姿关系包括所述第二支撑部与所述货叉组件的第二旋转角度以及在取放货方向的第二距离,根据所述第一位姿关系和所述第二位姿关系,判断所述货叉组件与所述目标库位是否对准,包括:
26、当所述第一旋转角度和第二旋转角度均小于预设角度,且所述第一距离与所述第二距离一致时,确定所述货叉组件与所述目标库位对准。
27、可选的,当所述货叉组件未与所述目标库位对准时,所述方法还包括:
28、根据所述第一位姿关系和所述第二位姿关系,调整所述货叉组件,以使所述货叉组件对准所述目标库位。
29、可选的,所述货叉组件的底部还设置有第三传感器,在控制所述货叉组件下降的过程中,所述方法还包括:
30、基于所述第三传感器采集所述目标库位的货板的第三检测数据;基于所述第三检测数据,判断所述货叉组件是否会撞到所述货板;若是,则停止所述货叉组件下降,并基于所述第三检测数据,对所述货叉组件进行调整,调整完毕后,控制所述货叉组件继续下降。
31、可选的,所述货叉组件包括货叉面板和支撑板,所述货叉面板和所述支撑板呈十字型,在控制所述货叉组件的货叉面板伸出之前,所述方法还包括:
32、根据支撑板的设置位置,以及所述第一位姿关系和所述第二位姿关系中的任一项,确定所述货叉面板的伸出长度。
33、相应的,控制所述货叉组件的货叉面板伸出,包括:
34、控制控制所述货叉组件的货叉面板伸出所述伸出长度。
35、可选的,所述货叉组件的表面还设置有第四传感器,在控制所述货叉组件上升的过程中,所述方法还包括:
36、基于所述第四传感器采集所述目标库位的货板的第四检测数据;基于所述第四检测数据,判断所述货叉组件是否会撞到所述货板;若是,则停止所述货叉组件上升,并基于所述第四检测数据,对所述货叉组件进行调整,调整完毕后,控制所述货叉组件继续上升。
37、可选的,在控制机器人的货叉组件提升至目标库位对应的高度之前,所述方法还包括:
38、基于所述第二传感器采集的所述机器人的暂存货架的预设层第五检测数据,其中,所述暂存货架的预设层存放有所述目标货物;基于所述第五检测数据,判断所述货叉组件与所述暂存货架的预设层是否对准;若是,则基于所述货叉组件从所述暂存货架的预设层提取所述目标货物。
39、第二方面,本公开实施例还提供了一种取放货装置,所述取放货装置应用于机器人,所述机器人的货叉组件上设置有第一传感器和第二传感器,所述取放货装置包括:
40、第一升高模块,用于当控制机器人的货叉组件提升至目标库位对应的高度时,控制所述货叉组件升高预设高度;第一检测模块,用于基于所述货叉组件上设置的第一传感器采集所述目标库位的第一检测数据,以根据所述第一检测数据判断所述目标库位上是否存在货物;第二检测模块,用于若所述目标库位上不存在货物,则控制所述货叉组件降低至所述目标库位对应的高度,并基于所述货叉组件上设置的第二传感器采集的所述目标库位的第二检测数据,判断所述货叉组件与所述目标库位是否对准;货物提取模块,用于若所述货叉组件与所述目标库位对准,则控制所述货叉组件将目标货物放置于所述目标库位。
41、第三方面,本公开实施例还提供了一种货叉组件,包括第一传感器、第二传感器和至少一个处理器;所述第一传感器和所述第二传感器分别用于采集目标库位的第一检测数据和第二检测数据;所述至少一个处理器用于执行如本公开第一方面对应的任意实施例提供的取放货方法。
42、第四方面,本公开实施例还提供了一种机器人,包括移动装置以及本公开第三方面对应的实施例提供的货叉组件。
43、第五方面,本公开实施例还提供了一种仓储系统,包括货架和本公开第四方面对应的实施例提供的机器人。
44、第六方面,本公开实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,当处理器执行所述计算机执行指令时,实现如本公开第一方面对应的任意实施例提供的取放货方法。
45、第七方面,本公开实施例还提供了一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现本公开第一方面对应的任意实施例提供的取放货方法。
46、本公开实施例提供的取放货方法、装置、货叉组件、机器人及介质,针对货叉组件设置有第一传感器和第二传感器的机器人,当机器人移动至取放货任务对应的目标库位,以及控制机器人的货叉组件提升至该目标库位对应的高度之后,控制货叉组件继续升高预设高度,开启第一传感器采集目标库位的第一检测数据,基于该第一检测数据确定目标库位的存放情况,进而当存放情况满足取放货任务要求时,控制货叉组件降低至目标库位对应的高度,进而基于第二传感器采集目标库位的第二检测数据,基于该第二检测数据判断货叉组件与目标库位是否对准,若是,则控制货叉组件执行取放货任务对应的取放货操作,实现了在机器人取放货之前,基于第一传感器和第二传感器进行目标库位的检测,以确定目标库位的存放情况以及判断货叉组件与目标库位是否对准,避免了机器人在取放货操作时与货架或目标库位上存放的货物发生碰撞,从而导致机器人或货架损坏,提高了取放货操作的安全性。
- 还没有人留言评论。精彩留言会获得点赞!