一种基于热驱动执行器的微型升降台
1.本发明属于柔性执行器技术领域,具体涉及一种基于热驱动执行器的微型升降台。
背景技术:
2.升降台广泛应用于生产生活中,通常使用液压驱动或者电机驱动方式进行升降。而在一些需要微操作、避免刚性接触和无法使用金属材料的场合,金属材料制造的这类升降台无法胜任。
3.公开号为cn111043271a的中国专利公开了一种微型旋转升降模组,包括底座,底座的顶部固定焊接有支撑板一,支撑板一的顶部固定韩额吉有固定板。该微型旋转升降模组,通过启动升降伺服马达,进而带动滚珠螺杆转动,进而带动螺母向上移动,进而带动滚珠花键向上移动,启动旋转伺服马达,带动传动轴一转动,带动滚珠花键旋转向上移动,实现了旋转升降双向功能,且增加了传动的稳定性,且微型旋转升降模组,结构小巧,宽度只有45mm,旋转精度
±
0.02
°
,升降精度
±
0.005mm,升降速度1000mm/s,旋转速度3000转/每分钟,负载5kg,不论是在宽度尺寸,还是运行精度都高于其他结构,宽度45mm的微型旋转升降模组可以在狭窄空间里同时并排多个,特别是在一些小空间排版取放精密旋转升降定位优势明显。
4.公开号为cn206720653u的中国专利公开了一种微型直驱升降台装置,包括底板、升降台面、直线步进电机,所述底板上固接电机座,所述直线步进电机安装在所述电机座中央,在所述电机座的左右两侧分别设有相对设置的方导轨,所述方导轨上设有沿所述方导轨上下滑动的滑块转接板,所述升降台面固定在所述滑块转接板上;其中一个所述滑块转接板上的一侧连接光栅尺座,所述光栅尺座上设有光栅尺,在所述电机座上靠近所述光栅尺设有读数头座,所述读数头座上设置光栅尺读数头。本实用新型的结构精巧,体积小,定位精度高,稳定性好,解决了空间限制的问题和现有升降台技术中无法精密平稳升降的问题。
5.上述专利虽然都可以实现在狭小空间内驱动工作台升降的效果,但是都需要借助电机等电气设备来实现,不仅成本较高;同时还是无法适用于一些需要避免刚性接触和无法使用金属材料的场合。因此,亟需采用新的驱动方式来实现升降功能。
技术实现要素:
6.本发明的目的是针对现有技术存在的问题,提供一种基于热驱动执行器的微型升降台。
7.为实现上述目的,本发明采用的技术方案是:
8.一种基于热驱动执行器的微型升降台,包括底座,所述底座上设有升降机构,所述升降机构上设有工作平台;所述工作平台为环形结构;所述升降机构包括首尾相邻的多组执行器,所述执行器的中部与底座固定连接,所述执行器的两端活动套设在工作平台上;所
述执行器包括紧密贴合的第一薄膜层和第二薄膜层,所述第一薄膜层的热膨胀系数小于第二薄膜层的热膨胀系数,且第一薄膜层位于第二薄膜层上方;所述升降台还包括热源装置,用于为执行器提供热能;当所述执行器受热后,执行器的两端向上翘起,驱动工作平台上升;当所述执行器冷却后,执行器的两端向下恢复原状,驱动工作平台下降。
9.具体地,所述第一薄膜层为pi薄膜,所述第二薄膜层为tpu薄膜;
10.pi(即聚酰亚胺)薄膜具有耐高温、耐低温、机械性能优良、热膨胀系数低、绝缘性能好、环保等特性;
11.tpu(即热塑性聚氨酯)薄膜具有高耐磨性、高硬度、高机械强度、加工性能好、环保等特性;
12.tpu薄膜的热膨胀系数高于pi薄膜的热膨胀系数;当执行器受热后,tpu薄膜的线性膨胀较pi薄膜的线性膨胀更明显,因此,执行器会朝着pi薄膜的一面弯曲,但由于执行器的中部是固定在底座上的,因此执行器的两端会向上翘起,从而驱动工作平台上升。
13.具体地,所述执行器的两端均设有t形槽,所述t形槽的形状、尺寸与工作平台的径向截面的形状、尺寸相配,所述执行器的端部通过t形槽活动卡接在工作平台上。通过设置t形槽,执行器两端在向上翘起或向下恢复的过程中,执行器的端部通过t形槽在环形工作台上滑移,使得工作平台在上升和下降的过程中,执行器的端部均能与工作平台连接。
14.具体地,所述执行器的形状为扇环形,多个所述执行器首位相邻组成与工作平台形状相同的环形。设置这种形状可以使得执行器的端部在环形工作平台上滑移更顺畅。
15.具体地,所述工作平台为轻质材料制成,可以减小升降机构的负荷,提高升降台的灵敏度。
16.可选地,所述热源装置包括温控平台,所述底座安装在温控平台上;通过所述底座将温控平台的热量传递至执行器,驱动工作平台上升或下降。通过调节温控平台的温度,即可控制升降台的升降高度。
17.可选地,所述热源装置包括电热丝,所述电热丝呈s形嵌设在第一薄膜层与第二薄膜层之间;通过给电热丝施加电压使其发热,驱动工作平台上升或下降。通过在第一薄膜层与第二薄膜层之间嵌设电热丝,可以进一步降低升降台的结构复杂度,降低成本。
18.与现有技术相比,本发明的有益效果是:本发明的升降台具有体积小、柔性接触、成本低等优点,可以在狭小空间内驱动工作平台升降;通过热源驱动执行器弯曲变形,从而带动工作平台上升或下降,能够适用于一些需要避免刚性接触和无法使用金属材料的场合。
附图说明
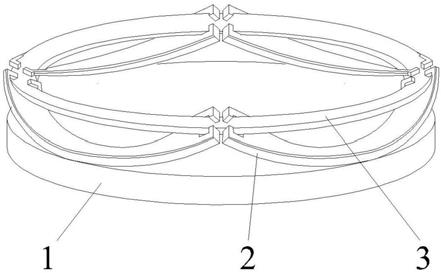
19.图1为本发明一种基于热驱动执行器的微型升降台的结构示意图;
20.图2为本发明实施例1中执行器的主视图;
21.图3为本发明中执行器的俯视图;
22.图4为本发明实施例1中热源温度为80℃时工作平台的高度随时间的变化图;
23.图5为本发明实施例2中执行器的主视图;
24.图6为本发明实施例2中驱动电压为9v时工作平台的高度随时间的变化图。
25.图中:1、底座;2、执行器;3、工作平台;4、第一薄膜层;5、第二薄膜层;6、t形槽;7、
电热丝。
具体实施方式
26.下面将结合本发明中的附图,对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动条件下所获得的所有其它实施例,都属于本发明保护的范围。
27.实施例1
28.如图1、2所示,本实施提供了一种基于热驱动执行器的微型升降台,包括底座1,所述底座1上设有升降机构,所述升降机构上设有工作平台3;所述工作平台3为环形结构;所述升降机构包括首尾相邻的4组执行器2(具体实施过程中,也可根据实际情况设置为3组或其他数量),所述执行器2的中部与底座1固定连接,所述执行器2的两端活动套设在工作平台3上;所述执行器2包括紧密贴合的第一薄膜层4和第二薄膜层5,所述第一薄膜层4的热膨胀系数小于第二薄膜层5的热膨胀系数,且第一薄膜层4位于第二薄膜层5上方;所述升降台还包括热源装置,用于为执行器2提供热能;当所述执行器2受热后,执行器2的两端向上翘起,驱动工作平台3上升;当所述执行器2冷却后,执行器2的两端向下恢复原状,驱动工作平台3下降。
29.具体地,所述第一薄膜层4为pi薄膜,所述第二薄膜层5为tpu薄膜;
30.pi(即聚酰亚胺)薄膜具有耐高温、耐低温、机械性能优良、热膨胀系数低、绝缘性能好、环保等特性;
31.tpu(即热塑性聚氨酯)薄膜具有高耐磨性、高硬度、高机械强度、加工性能好、环保等特性;
32.tpu薄膜的热膨胀系数高于pi薄膜的热膨胀系数;当执行器2受热后,tpu薄膜的线性膨胀较pi薄膜的线性膨胀更明显,因此,执行器2会朝着pi薄膜的一面弯曲,但由于执行器2的中部是固定在底座1上的,因此执行器2的两端会向上翘起,从而驱动工作平台3上升。
33.具体地,如图3所示,所述执行器2的两端均设有t形槽6,所述t形槽6的形状、尺寸与工作平台3的径向截面的形状、尺寸相配,所述执行器2的端部通过t形槽6活动卡接在工作平台3上。通过设置t形槽6,执行器2两端在向上翘起或向下恢复的过程中,执行器2的端部通过t形槽6在环形工作台上滑移,使得工作平台3在上升和下降的过程中,执行器2的端部均能与工作平台3连接。
34.具体地,所述执行器2的形状为扇环形,多个所述执行器2首位相邻组成与工作平台3形状相同的环形。设置这种形状可以使得执行器2的端部在环形工作平台3上滑移更顺畅。所述执行器2的内径为80mm,外径为95mm。
35.本实施例中,所述pi薄膜的厚度为0.04~0.06mm,优选为0.04mm;宽度为10~15mm,优选为12.5mm;长度为30~40mm,优选为35mm;所述tpu薄膜的厚度为0.3~0.6mm,优选为0.45mm;宽度、长度与pi薄膜一致。
36.具体地,所述工作平台3为塑料或纸质薄片,可以减小升降机构的负荷,提高升降台的灵敏度。
37.可选地,所述热源装置包括温控平台,所述底座1安装在温控平台上;通过所述底
座1将温控平台的热量传递至执行器2,驱动工作平台3上升或下降。通过调节温控平台的温度,即可控制升降台的升降高度。
38.本实施例中执行器2的驱动方式为:将底座1置于温控平台(高温平台)上,通过底座1将热量传递至执行器2,执行器2在受热后两端向上弯曲,推动工作平台3向上运动;降低温控平台的温度至环境温度后,执行器2两端逐渐恢复为弯曲前的平坦状态,工作平台3向下运动。
39.如图4所示,本实施例中,温控平台的温度为80℃时,执行器2可在40s内将8.3g的物体提高15mm。
40.实施例2
41.如图5所示,本实施例提供了一种基于热驱动执行器的微型升降台,与上述实施例1的区别点在于,本实施例中,所述热源装置包括电热丝7,所述电热丝7呈s形嵌设在第一薄膜层4与第二薄膜层5之间;通过给电热丝7施加电压使其发热,驱动工作平台3上升或下降。通过在第一薄膜层4与第二薄膜层5之间嵌设电热丝7,可以进一步降低升降台的结构复杂度,降低成本。
42.所述电热丝7为镍铬电阻丝,所述镍铬电阻丝的丝径为0.08mm;所述电热丝7从执行器2一端伸入,呈s形嵌设于两层薄膜中间后从执行器2另一端伸出,连接至下一组执行器2中,直至串联4组执行器2。
43.本实施例中执行器2驱动方式为:通过电热丝7接入驱动电压,电热丝7发热后执行器2温度升高,两端向上弯曲,推动工作平台3向上运动。断开驱动电压后,电热丝7温度逐渐降低,执行器2两端逐渐恢复为弯曲前的平坦状态,工作平台3向下运动。
44.如图6所示,本实施例中,对镍铬电阻丝施加9v电压进行驱动时,可在40s内将8.3g的物体提高13.2mm。
45.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1