一种基于输送量控制带式输送机节能方法及装置与流程
1.本发明涉及输送带节能控制技术领域,具体地涉及一种基于输送量控制带式输送机节能方法及装置。
背景技术:
2.带式输送机正常工作状态下,由于掉落到输送带上的运载物规律性差,在带式输送机整个工作过程中会存在部分时间段内运输量大、部分时间段内运输量小,整条运输带上运输货物分布不均匀,部分区段运载的货物量偏大、部分区段运载的货物量偏小,带式输送机在整个工作过程中均采用同种模式运行会造成不必要的能量浪费,而现有能够自动调节传送带工作模式的方法较为复杂,成本较高,为解决上述问题,有必要设计一种基于输送量控制带式输送机节能方法及装置。
技术实现要素:
3.本发明的目的在于克服现有技术存在的缺点,提出设计一种基于输送量控制带式输送机节能方法,能够根据带式输送机整体运载货物量的大小改变输送机电机绕组的接法,能够有效降低能量浪费,实现输送带节能,方法简单可靠。
4.本发明解决其技术问题所采取的技术方案是:
5.一种基于输送量控制带式输送机节能方法,包括:
6.a、安装:在带式输送机一侧沿带式输送机方向延续不间断的设置输送量参考板,在带式输送机另一侧沿带式输送机方向均匀分布图像采集模块,且图像采集模块的图像采集方向朝向输送量参考板;
7.b、采集输送带图像信息:图像采集模块以输送量参考板为背景对带式输送机运输状态分段实时监控,并将采集的图像信息传输至控制系统;
8.c、分析输送量调整电机绕组的接法:控制系统根据分段监控结果,判断运输货物高度,对带式输送机输送总量进行评估,并根据带式输送机输送总量的评估结果调整带式输送机电机绕组的接法。
9.进一步的,步骤c中,所述电机绕组的接法通过电动机
△
/y接法转换电路进行控制,电动机
△
/y接法转换电路为y
‑△‑
y型连接方式。
10.进一步的,步骤c中,在所述控制系统中预设输送量刻度线及该刻度线的波动范围,控制系统根据预设输送量刻度线对带式输送机该段内货物运输量进行估算:
11.当该区段运输货物高度在预设输送量刻度线的波动范围内波动或者低于预设输送量刻度线,对该段运输量计为0,其他情况运输量计为1;
12.控制系统将所有图像采集模块传输的图像信息进行分析,对带式输送机所有段内运输量进行计数统计,当带式输送机所有段内运输量计数总和为0,控制系统控制用于调整带式输送机电机绕组的控制器,控制器控制电动机
△
/y接法转换电路,将电机绕组电路调整为星型接线法,当带式输送机所有段内运输量计数总和不为0时,控制系统控制用于调整
带式输送机电机绕组的控制器,控制器控制电动机
△
/y接法转换电路,将电机绕组电路调整为三角型接线法。
13.进一步的,所述带式输送机输送过程中,同时通过所述图像采集模块对带式输送机输送带结构完整性实时监视,当发现输送带发生断裂时,通过控制系统及时控制沿带式输送机横向分布的断带捕抓器捕捉断带,避免断带下滑。本发明实现方法简单可靠,能够有效降低企业对带式输送机改造成本,有效降低输送带能量消耗,实现节能。
14.进一步的,本发明还提供了一种用于实现所述基于输送量控制带式输送机节能方法的装置,包括带式输送机、输送量参考板和图像采集模块;所述输送量参考板固定在带式输送机一侧且沿带式输送机方向延续不间断;所述图像采集模块固定在带式输送机的另一侧,图像采集模块沿带式输送机运输方向均匀分布且图像采集模块的图像采集方向朝向输送量参考板;图像采集模块以输送量参考板为背景对带式输送机运输状态分段实时监控,并与控制系统连接,控制系统根据分段监控结果对带式输送机输送总量进行评估,并根据带式输送机输送总量的评估结果调整带式输送机电机绕组的接法。
15.进一步的,所述带式输送机机头与机尾两端分别固定机头侧电控机箱、机尾侧电控机箱;所述机头侧电控机箱、机尾侧电控机箱内部均安装有控制器和
△
/y接法转换电路;所述控制器与控制系统连接;所述
△
/y接法转换电路与控制器连接,控制器根据控制系统指令,控制
△
/y接法转换电路调整电机绕组的接法。
16.进一步的,所述电动机
△
/y接法转换电路为y
‑△‑
y型连接方式。
17.进一步的,所述控制系统与图像采集模块、控制器之间通过数据导线连接或无线连接。
18.进一步的,所述用于实现所述基于输送量控制带式输送机节能方法的装置,还包括断带捕抓器,所述断带捕抓器沿带式输送机横向分布,用于抓捕断带。
19.进一步的,所述断带捕抓器包括固定架、上部夹件和下部夹件;所述固定架为长方体架构,固定在水平面上;所述上部夹件与下部夹件分别固定在固定架内侧顶部与内侧底部;带式输送机的上皮带从上部夹件与下部夹件之间穿过。当发现输送带发生断裂时,图像采集模块将输送带图像信息传输给控制系统,控制系统识别出输送带发生断裂,控制系统控制所有断带捕抓器进行断带抓捕工作,及时控制断带捕抓器的上部夹件及下部夹件捕捉断带,避免断带下滑。
20.进一步的,所述图像采集模块采用高清摄像头或摄像机,优选为usb高清摄像头。
21.本发明的技术效果:
22.与现有技术相比,本发明的一种基于输送量控制带式输送机节能方法,通过摄像头图像采集与输送量参考板配合使用,能够准确快速判断运输货物高度,并准确快速估算出整条输送带运输量,根据输送带运输量调整电机绕组接线方式,实现运输总量较小时采用星型接线法,当运输总量较大时采用三角型接线法,能够大幅度避免带式输送机能量浪费起到节能作用,通过摄像头图像采集输送带运行情况,能够全面判断输送机断带位置,而且断带捕抓器结构简单稳定可靠,工作时上液压推杆与下液压推杆同时推动压块相向运动,有效降低断带抓捕时间,实现方法简单且成本低廉能够有效降低企业成本。
附图说明
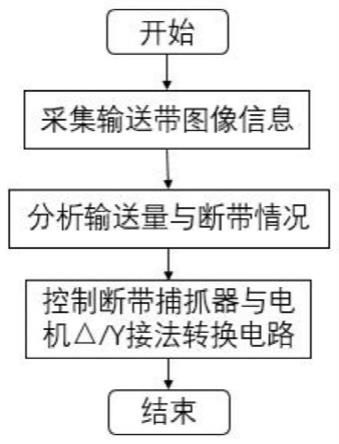
23.图1为本发明工作流程图;
24.图2为本发明控制程序框图;
25.图3为本发明低输送量下摄像头对输送量参考板图像采集结果示意图;
26.图4为本发明高输送量下摄像头对输送量参考板图像采集结果示意图;
27.图5为本发明整体结构俯视示意图;
28.图6为本发明断带捕抓器结构示意图。
29.图中,1
‑
带式输送机;2
‑
机头侧电控机箱;3
‑
断带捕抓器;4
‑
输送量参考板;5
‑
机尾侧电控机箱;6
‑
摄像头;7
‑
固定架;8
‑
上液压推杆;9
‑
上压块;10
‑
下压块;11
‑
下液压推杆;12
‑
固定杆;81
‑
固定杆a;82
‑
运动杆a;111
‑
固定杆b;b112
‑
运动杆;
ⅰ‑
低输送量刻度线。
具体实施方式
30.为使本发明实施例的目的、技术方案和优点更加清楚,下面结合说明书附图,对本发明实施例中的技术方案进行清楚、完整地描述。
31.实施例1:
32.如图1和2所示,本实施例涉及的一种基于输送量控制带式输送机节能方法,包括:
33.a、安装:在带式输送机1一侧沿带式输送机1方向延续不间断的设置输送量参考板4,在带式输送机1另一侧沿带式输送机1方向均匀分布图像采集模块,且图像采集模块的图像采集方向朝向输送量参考板4;
34.b、采集输送带图像信息:图像采集模块以输送量参考板4为背景对带式输送机1运输状态分段实时监控,并将采集的图像信息传输至控制系统;
35.c、分析输送量与断带情况:通过图像采集模块6对带式输送机1输送带结构完整性实时监视,若发现输送带发生断裂时,及时控制沿带式输送机1横向分布的断带捕抓器3捕捉断带,避免断带下滑;若输送带未发生断裂,控制系统根据分段监控结果,对不同区段内采集的图像逐个分析,判断各区段运输货物高度,从而对带式输送机1输送总量进行评估,并根据带式输送机1输送总量的评估结果调整带式输送机1电机绕组的接法。
36.具体的,步骤c中,所述电机绕组的接法通过电动机
△
/y接法转换电路进行控制,电动机
△
/y接法转换电路为y
‑△‑
y型连接方式。当运输总量较小时,电机需要的功率较低,电机绕组采用星型接线法,当运输总量较大时,电机需要的功率较高,电机绕组采用三角型接线法。
37.示例性的,如图3和图4所示,在控制系统中预设低输送量刻度线ⅰ及低输送量刻度线ⅰ所允许的波动范围;所述控制系统根据低输送量刻度线ⅰ对带式输送机1该段内货物运输量进行估算,当该区段运输货物高度在低输送量刻度线ⅰ附近波动或者低于低输送量刻度线ⅰ对该段运输量计为0,其他情况运输量计为1;控制系统将所有图像采集模块6传输的图像信息进行分析,对带式输送机1所有段内运输量进行计数统计,当带式输送机所有段内运输量计数总和为0,此时,带式输送机输送量情况为小输送量,即运输总量较小,控制系统控制用于调整带式输送机1电机绕组的控制器,控制器控制电动机
△
/y接法转换电路,将电机绕组电路调整为星型接线法,当带式输送机所有段内运输量计数总和不为0时,此时,带式输送机输送量情况为大输送量,即运输总量较大,控制系统控制用于调整带式输送机1电
机绕组的控制器,控制器控制电动机
△
/y接法转换电路,将电机绕组电路调整为三角型接线法。
38.本发明利用视觉识别系统对带式输送机运输状态分段实时监控,根据分段监控结果对带式输送机输送总量进行评估,并根据带式输送机输送总量的评估结果调整输送机电机绕组的接法,当运输总量较小时,电机需要的功率较低电机绕组采用星型接线法,当运输总量较大时,电机需要的功率较高电机绕组采用三角型接线法,同时视觉识别系统对带式输送机输送带结构完整性实时监视,当发现输送带发生断裂时,及时控制断带捕抓器捕捉断带避免断带下滑。本发明也易于对于原带式输送机进行改造,实现方法简单可靠,能够有效降低企业对带式输送机的改造成本,有效降低输送带能量消耗,实现节能。
39.实施例2:
40.如图5和图6所示,本实施例涉及一种用于实现所述基于输送量控制带式输送机节能方法的装置,包括带式输送机1、断带捕抓器3、输送量参考板4和图像采集模块6;所述输送量参考板4固定在带式输送机1一侧且沿带式输送机1方向延续不间断;所述图像采集模块6固定在固定杆12的顶端,固定杆12通过螺栓固定在水平面上位于带式输送机1的另一侧;图像采集模块6沿带式输送机1运输方向均匀分布且图像采集模块6的图像采集方向朝向输送量参考板4,图像采集模块6以输送量参考板4为背景对带式输送机1运输状态分段实时监控,并与控制系统连接,控制系统根据分段监控结果,判断运输货物高度,对带式输送机1输送总量进行评估,并根据带式输送机1输送总量的评估结果调整带式输送机1电机绕组的接法;所述断带捕抓器3沿带式输送机1横向分布并固定于水平面上,用于断带抓捕工作。
41.如图5所示,所述带式输送机1机头与机尾两端分别固定机头侧电控机箱2、机尾侧电控机箱5;所述机头侧电控机箱2、机尾侧电控机箱5内部均安装有控制器和
△
/y接法转换电路;所述控制器与控制系统连接;所述
△
/y接法转换电路为y
‑△‑
y型连接方式且与控制器连接,控制器根据控制系统指令,控制
△
/y接法转换电路调整电机绕组的接法。
42.所述控制系统与图像采集模块、控制器之间通过数据导线连接。
43.如图6所示,所述断带捕抓器3包括固定架7、上部夹件和下部夹件;所述上部夹件包括上液压推杆8和上压块9,所述下部夹件包括下液压推杆11和下压块10。
44.所述上液压推杆8包括固定杆a81和运动杆a82,所述固定杆a81上端与固定架7内侧顶部固定,运动杆a82下端与上压块9固定。
45.所述下液压推杆11包括固定杆b111和运动杆b112;所述固定杆b111下端与固定架7内侧底部固定,运动杆b112上端与下压块10固定。
46.所述带式输送机1的上皮带从上压块9与下压块10间穿过;所述上液压推杆8和下液压推杆11均与控制系统连接。当图像采集模块6将输送带图像信息传输给控制系统,控制系统识别出输送带发生断裂,控制系统及时控制所有断带捕抓器3进行断带抓捕工作,上液压推杆8与下液压推杆11开始工作时,推动上压块9与下压块10运动,通过上压块9与下压块10对带式输送机1的上皮带夹紧,实现对带式输送机1的断带抓捕,避免断带下滑。
47.所述输送量参考板4通过螺栓固定连接在固定架7上,无需额外再设置支架来支撑输送量参考板4,结构简单,便于安装和拆卸。
48.所述图像采集模块6、固定杆12、断带捕抓器3、输送量参考板4均为多个,具体根据
输送带长度灵活选择;所述图像采集模块6采用高清摄像头。
49.上述具体实施方式仅是本发明的具体个案,本发明的专利保护范围包括但不限于上述具体实施方式的产品形态和式样,任何符合本发明权利要求书且任何所属技术领域的普通技术人员对其所做的适当变化或修饰,皆应落入本发明的专利保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1