β射线法大气颗粒物浓度测量走纸控制方法和装置与流程
β
射线法大气颗粒物浓度测量走纸控制方法和装置
技术领域
1.本发明涉及环境大气颗粒物浓度测量技术领域,尤其涉及一种β射线法大气颗粒物浓度测量走纸控制方法和装置。
背景技术:
2.环境大气中含有一定浓度的大气颗粒物,而大气颗粒物中含有大量有害物质及微生物会危害人类健康。因此,大气颗粒物的浓度是影响大气质量的重要因素。世界上很多国家对环境大气中颗粒物浓度进行监测以了解空气污染的情况,以及根据大气污染的情况采取相应的应对措施。现有的监测大气颗粒物质量浓度的仪器有多种原理,包括重量法、微量振荡天平法、β射线法和光散射法等。重量法是所有监测颗粒物浓度中最直接、最可靠的方法,它的问题是测量速度太慢:采一个数据要至少几个小时。这种方法是无法进行在线即时测量的。微量振荡天平法的监测数据相比重量法有季节性差异,夏、秋两季振荡天平法监测的质量浓度高于重量法,冬、春两季则相反。光散射法易受环境湿度和颗粒物成分的影响,目前国家尚未出台相关的光散射法测量颗粒物浓度的国家标准。β射线法要求样品量很少,可每小时自动得出一个监测数据,实时反映空气中颗粒物浓度的变化情况,并可进行数据传输,有利于远程监测和自动控制,并极大的减少了人工工作量。因此,β射线法已经成为大气环境颗粒物浓度的连续自动监测仪的主要测量方法之一。
3.现有技术的便携式β射线法大气颗粒物浓度测量装置,其走纸机构包括两个工位,一个是颗粒物的富集工位,而另一个是颗粒物的测量工位,纸带在富集工位富集完成之后,此时纸带上会形成由于颗粒物富集而形成圆形尘斑,纸带会走到测量工位进行测量,测量出颗粒物的浓度。
4.因此,亟需一种能够准确地进行颗粒物浓度测量的走纸控制方法和装置。
技术实现要素:
5.本发明的目的是提供一种能够准确地进行颗粒物浓度测量的走纸控制方法和装置。
6.为了实现上述目的,本发明提供的技术方案为:提供一种β射线法大气颗粒物浓度测量走纸控制方法,包括,如下步骤:
7.步骤1,待纸带o点在富集工位进行富集完成,驱动电机驱动纸带o点向测量工位移动,在所述纸带o点向测量工位移动时,同时记录β值变化,待β值在最小β值范围区域时,多次来回走纸以确定最小β值c1的大小;
8.步骤2,根据所述最小β值c1计算大气颗粒物的浓度值大小。
9.所述纸带o点在所述富集工位富集之前,所述纸带o点在所述测量工位上测量所述纸带o点的底值β0,待所述纸带o点测量完底值β0后,所述驱动电机驱动所述纸带o点在所述富集工位上进行富集。
10.所述步骤1中,所述最小β值范围区域是由近期多组最小β值确定的,并可对所述最
小β值范围区域进行更新。
11.所述多组最小β值包括β1、β2、β3、β4、β5、
……
、β100,其中β1《β2《β3《β4《β5《
……
《β100。
12.所述步骤1中,所述对所述最小β值范围区域进行更新,具体地:当所述近期多组最小β值中有n组连续测量的颗粒物浓度值均小于β1时,或者n组连续测量的颗粒物浓度值均大于β100时,根据所述n组连续测量的颗粒物浓度值的平均值βa对所述最小β值范围区域进行更新。
13.所述驱动电机为伺服电机,步骤1中,所述待β值在最小β值范围区域时,多次来回走纸以确定最小β值c1的大小,具体是所述待β值在最小β值范围区域时,所述伺服电机降低走纸的速度,在左右5毫米的区域内多次来回走纸以确定最小β值c1的大小。
14.为了实现上述目的,本发明还提供一种β射线法大气颗粒物浓度测量走纸控制装置,包括:
15.最小β值确定单元,用于待纸带o点在富集工位进行富集完成,驱动电机驱动纸带o点向测测量工位移动,在所述纸带o点向测量工位移动时,同时记录β值变化,待β值在最小β值范围区域时,多次来回走纸以确定最小β值c1的大小;
16.浓度就算单元,用于根据所述最小β值c1计算大气颗粒物的浓度值大小。
17.所述纸带o点在所述富集工位富集之前,所述纸带o点在所述测量工位上测量所述纸带o点的底值β0,待所述纸带o点测量完底值β0后,所述驱动电机驱动所述纸带o点在所述富集工位上进行富集。
18.所述最小β值确定单元中,所述最小β值范围区域是由近期多组最小β值确定的,并可对所述最小β值范围区域进行更新。
19.所述多组最小β值包括β1、β2、β3、β4、β5、
……
、β100,其中β1《β2《β3《β4《β5《
……
《β100。
20.所述最小β值确定单元中,所述对所述最小β值范围区域进行更新,具体地:当所述近期多组最小β值中有n组连续测量的颗粒物浓度值均小于β1时,或者n组连续测量的颗粒物浓度值均大于β100时,根据所述n组连续测量的颗粒物浓度值的平均值βa对所述最小β值范围区域进行更新。
21.所述驱动电机为伺服电机,所述最小β值确定单元中,所述待β值在最小β值范围区域时,多次来回走纸以确定最小β值c1的大小,具体是所述待β值在最小β值范围区域时,所述伺服电机降低走纸的速度,在左右5毫米的区域内多次来回走纸以确定最小β值c1的大小。
22.与现有技术相比,本发明提供的一种β射线法大气颗粒物浓度测量走纸控制方法,其步骤1中,待纸带o点在富集工位进行富集完成,驱动电机驱动纸带o点向测量工位移动,在所述纸带o点向测量工位移动时,同时记录β值变化,待β值在最小β值范围区域时,多次来回走纸以确定最小β值c1的大小;通过确定β值在最小β值范围区域时,能够快速地通过多次来回走纸的方式来确定最小β值c1的大小,从而能够快速地根据所述最小β值c1计算大气颗粒物的浓度值大小。
23.通过以下的描述并结合附图,本发明将变得更加清晰,这些附图用于解释本发明的实施例。
附图说明
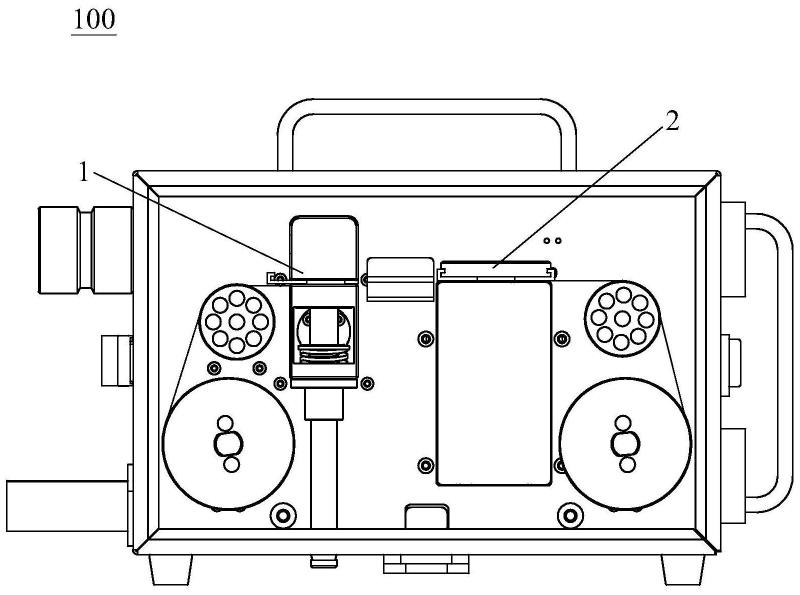
24.图1所示为β射线法大气颗粒物浓度测量装置的示意图。
25.图2所示为纸带o点的示意图。
26.图3所示为β值变化的曲线示意图。
27.图4所示为本发明β射线法大气颗粒物浓度测量走纸控制装置的电路原理模块图。
具体实施方式
28.现在参考附图描述本发明的实施例,附图中类似的元件标号代表类似的元件。如上所述,参考1、2、3,本发明的实施例提供的技术方案为:提供一种β射线法大气颗粒物浓度测量走纸控制方法,包括,如下步骤:
29.参考图1,步骤1,待纸带o点在富集工位1进行富集完成,驱动电机驱动纸带o点向测量工位2移动,在所述纸带o点向测量工位移动时,同时记录β值变化,待β值在最小β值范围区域时,多次来回走纸以确定最小β值c1的大小;
30.需要说明的是,为了更方便地进行说明,本文的所有实施例中,纸带o点是纸带当前进行颗粒物富集和颗粒物浓度测量的点。颗粒物富集时,纸带o点位于富集工位1,颗粒物浓度测量时,纸带o点位于测量工位2。
31.纸带o点在富集工位进行富集,然后在测量工位进行颗粒物浓度测量。因此纸带o点随着纸带在测量工位和富集工位上来回移动。
32.由于目前纸带纸盘的结构,以及纸带自身固有的物理特性,此外还由于设备装配的精度问题,走纸机构的驱动电机在启动和停止的瞬间还会造成纸带的震动,以上各种因使得纸带在走纸过程中,纸带o点很难精确地从富集工位走到测量工位,或者从测量工位走到富集工位,走纸精度不高,因此测量误差高,造成无法准确地对纸带o点的颗粒物浓度进行测量。
33.本领域技术人员通常是通过闪烁计数器作为检测器对β射线通量(即β值)进行计数,其计数频率的变化可表征β射线强度的变化,测量结果只取决于两次计数的比值和质量吸收系数,与β源的原始强度无关。闪烁计数器配合下位机及上位机,对β值(β射线通量)进行记录。其中下位机通常是通过fpga实现的,而上位机是单片机实现的。
34.待β值在最小β值范围区域时,可认为是纸带o点基本进入了测量工位,此时,可通过驱动电机驱动纸带多次来回走纸,多次来回走纸使得纸带o点完全处于测量工位时,最低β值c1被确定和记录下来。
35.需要说明的是,β射线由于其自身的物理特性,即是离散性,如果只是一次两次来回走纸,很难测得准确的最低β值c1,多次来回走纸能够规避由于β射线的离散性带来的测量误差以至测量错误。
36.因此通过本发明步骤1提供的技术方案,能够完美地解决由于走纸机构走纸误差带来的颗粒物浓度测量不准确的问题。
37.步骤2,根据所述最小β值c1计算大气颗粒物的浓度值大小。如果能准确地对最小β值c1进行测量,那么根据最小β值计算大气颗粒物浓度是容易实现的。
38.一个实施例中,参考图2,纸带3,所述纸带o点4为在纸带3上的一部分,在所述富集工位1富集之前,所述纸带o点在所述测量工位2上测量所述纸带o点的底值β0,待所述纸带o
点4测量完纸带o点的底值β0后,所述驱动电机驱动所述纸带o点4在所述富集工位上1进行富集。
39.对所述纸带o点的底值β0进行说明,本文中,纸带o点的底值β0是指在β射线规避离散性,在其能量最大的瞬间对准纸带o点,被纸带o点所遮挡一部分射线后,被检测器检测到的剩余的β射线的通量,认为是纸带o点的底值β0。
40.需要说明的是,参考图2,纸带o点测完底值β0后,走纸机构驱动纸带3移动,使得纸带o点4从测量工位2移动到富集工位1。具体实施过程中,纸带o点测完底值β0后,纸带o点4从测量工位2移动到富集工位1,在具体走纸过程中,纸带o点4也不能完全准确地从测量工位2走纸到富集工位1,例如以直径为18毫米的纸带o点为例,纸带o点的边缘可能会左右偏离0~1毫米,纸带o点的形状是圆形,考虑到纸带o点4的边缘(月牙形边缘)的质量占有纸带o点4整体的质量是极小的,因此,在纸带o点的边缘在占比整个纸带o点质量极小的前提下,纸带o点的边缘左右偏离0~1毫米,即是一个月牙形的边缘替换为另一个月牙形的边缘,还考虑到一般选用质量较好的,纸带各处比较均匀的纸带,在纸带在颗粒物富集之前,走纸误差带来的纸带o点的底值β0的误差可以忽略。参考图2富集工位1下方的纸带o点4,其中,虚线为纸带o点左右偏移一个0~1毫米的距离的示意图。
41.一个实施例中,结合图4,所述步骤1中,所述最小β值范围区域是由近期多组最小β值确定的,并可对所述最小β值范围区域进行更新。在本实施例中,在所述纸带o点向测量工位移动时,β值是处于不断变小的过程,最小β值对应的颗粒物浓度值即为纸带o点所富集的颗粒物的浓度值,一旦β值的大小落入最小β值区域时,表示纸带o点所富集的颗粒物的浓度值接近被找到,降低走纸速度,并多次来回走纸,具体地可以在2毫米范围内来回走纸,以确定最小β值c1的大小。最小β值范围区域可根据最新测得的n组最小β值进行更新。图3所示,横轴为纸带位移,纵轴为β值,β值曲线的最低点对应的β值为最小β值。
42.需要说明的是,纸带o点是纸带当前进行颗粒物富集和颗粒物浓度测量的点,即是当前测量点。因此:“近期多组最小β值”,是指纸带o点和在纸带o点之前的近期多个测量点所分别对应的多组最小β值。因此,近期多个测量点对应的多组最小β值是能反应最新空气质量的一组数据。
43.还需要说明的是,本文中,最小β值是指在β射线规避离散性,在其能量最大的瞬间对准纸带o点,而被纸带o点上富集的颗粒物和纸带本身所遮挡一部分射线后,被检测器检测到的剩余的β射线的通量,定义为最小β值。
44.确定好最小β值后,再根据所述纸带o点的底值β0,能够根据惯用的计算公式计算出纸带o点出的颗粒物浓度值。
45.一个实施例中,较佳者,所述多组最小β值包括β1、β2、β3、β4、β5、
……
、β100,其中β1《β2《β3《β4《β5《
……
《β100。具体地,多组最小β值可以根据历史经验值系统自动更新得到,对β1-β100中任一个β值还可手动输入得到,或者对β1~β100中的任何一个β值进行更新。
46.一个实施例中,所述步骤1中,所述对所述最小β值范围区域进行更新,具体地:当所述近期多组最小β值中有n组连续测量的颗粒物浓度值均小于β1时,或者n组连续测量的颗粒物浓度值均大于β100时,根据所述n组连续测量的颗粒物浓度值的平均值βa对所述最小β值范围区域进行更新。不难理解地,最小β值若是确定,则能计算出纸带o点(当前测量点)所富集的颗粒物浓度值,因此确定最小β值,即是能够计算出纸带o点所富集的颗粒物浓
度值。由于,环境空气的质量(环境空气所含有的颗粒物的浓度值)是处于不断变化的,因此需要对所述最小β值范围区域进行更新,其中在本实施例中,最小β值区域范围是指β值落入β1-β100范围内的β值。
47.所述步骤1中,当所述近期多组最小β值中有n组连续测量的颗粒物浓度值均小于β1或大于β100时,根据所述n组连续测量的颗粒物浓度值的平均值βa对所述最小β值范围区域进行更新。
48.在本实施例中,当根据近期测量的多组数据来看,所述近期多组最小β值中若有n组连续测量的颗粒物浓度值均小于β1,可见空气质量是处于变差过程中,若有n组连续测量的颗粒物浓度值均大于β100,可见空气质量是处于变好过程,为了能够快速地测出纸带o点的最小β值,需要对β1-β100中的部分或者所有数值进行替换和更新。
49.所述步骤1中,当所述近期多组最小β值中有n组连续测量的颗粒物浓度值均小于β1或大于β100时,所述根据所述n组连续测量的颗粒物浓度值的平均值βa对所述最小β值范围区域进行更新,具体是,将所述βa对β1~β100中的任一个β值进行更新。
50.所述驱动电机为伺服电机,步骤1中,所述待β值在最小β值范围区域时,多次来回走纸以确定最小β值c1的大小,具体是所述待β值在最小β值范围区域时,所述伺服电机降低走纸的速度,在左右5毫米的区域内多次来回走纸以确定最小β值c1的大小。β射线由于其自身的物理特性,即是离散性。在现有技术的控制系统,很难将纸带o点由富集点走纸到测量点的前提下,一两次来回走纸,很难准确地确定纸带o点的最小β值,只有多次来回走纸,才能准确地规避β射线的离散性,让纸带o点,完全地经过测量点,并在β射线能量最大时穿过纸带o点,从而准确地测出准确的最小β值。
51.为了实现上述目的,本发明还公开了一种β射线法大气颗粒物浓度测量走纸控制装置100,包括:
52.参考图4,最小β值确定单元10,用于待纸带o点在富集工位1进行富集完成,驱动电机驱动纸带o点向测量工位2移动,在所述纸带o点向测量工位移动时,同时记录β值变化,待β值在最小β值范围区域时,多次来回走纸以确定最小β值c1的大小;
53.需要说明的是,为了更方便地进行说明,本文的所有实施例中,纸带o点是纸带当前进行颗粒物富集和颗粒物浓度测量的点。颗粒物富集时,纸带o点位于富集工位1,颗粒物浓度测量时,纸带o点位于测量工位2。
54.纸带o点在富集工位进行富集,然后在测量工位进行颗粒物浓度测量。因此纸带o点随着纸带在测量工位和富集工位上来回移动。
55.由于目前纸带纸盘的结构,以及纸带自身固有的物理特性,此外还由于设备装配的精度问题,走纸机构的驱动电机在启动和停止的瞬间还会造成纸带的震动,以上各种因使得纸带在走纸过程中,纸带o点很难精确地从富集工位走到测量工位,或者从测量工位走到富集工位,走纸精度不高,因此测量误差高,造成无法准确地对纸带o点的颗粒物浓度进行测量。
56.本领域技术人员通常是通过闪烁计数器作为检测器对β射线通量(即β值)进行计数,其计数频率的变化可表征β射线强度的变化,测量结果只取决于两次计数的比值和质量吸收系数,与β源的原始强度无关。闪烁计数器配合下位机及上位机,对β值(β射线通量)进行记录。其中下位机通常是通过fpga实现的,而上位机是单片机实现的。
57.待β值在最小β值范围区域时,可认为是纸带o点基本进入了测量工位,此时,可通过驱动电机驱动纸带多次来回走纸,多次来回走纸使得纸带o点完全处于测量工位时,最低β值c1被确定和记录下来。
58.需要说明的是,β射线由于其自身的物理特性,即是离散性,如果只是一次两次来回走纸,很难测得准确的最低β值c1,多次来回走纸能够规避由于β射线的离散性带来的测量误差以至测量错误。
59.因此通过本发明最小β值确定单元10,提供的技术方案,能够完美地解决由于走纸机构走纸误差带来的颗粒物浓度测量不准确的问题。
60.浓度计算单元20,用于根据所述最小β值c1计算大气颗粒物的浓度值大小。如果能准确地对最小β值c1进行测量,那么根据最小β值计算大气颗粒物浓度是容易实现的。
61.一个实施例中,参考图2,纸带3,所述纸带o点4为在纸带3上的一部分,在所述富集工位1富集之前,所述纸带o点在所述测量工位2上测量所述纸带o点的底值β0,待所述纸带o点4测量完纸带o点的底值β0后,所述驱动电机驱动所述纸带o点4在所述富集工位上1进行富集。
62.对所述纸带o点的底值β0进行说明,本文中,纸带o点的底值β0是指在β射线规避离散性,在其能量最大的瞬间对准纸带o点,被纸带o点所遮挡一部分射线后,被检测器检测到的剩余的β射线的通量,认为是纸带o点的底值β0。
63.需要说明的是,参考图2,纸带o点测完底值β0后,走纸机构驱动纸带3移动,使得纸带o点4从测量工位2移动到富集工位1。具体实施过程中,纸带o点测完底值β0后,纸带o点4从测量工位2移动到富集工位1,在具体走纸过程中,纸带o点4也不能完全准确地从测量工位2走纸到富集工位1,例如以直径为18毫米的纸带o点为例,纸带o点的边缘可能会左右偏离0~1毫米,纸带o点的形状是圆形,考虑到纸带o点4的边缘(月牙形边缘)的质量占有纸带o点4整体的质量是极小的,因此,在纸带o点的边缘在占比整个纸带o点质量极小的前提下,纸带o点的边缘左右偏离0~1毫米,即是一个月牙形的边缘替换为另一个月牙形的边缘,还考虑到一般选用质量较好的,纸带各处比较均匀的纸带,在纸带在颗粒物富集之前,走纸误差带来的纸带o点的底值β0的误差可以忽略。参考图2富集工位1下方的纸带o点4,其中,虚线为纸带o点左右偏移一个0~1毫米的距离的示意图。
64.一个实施例中,结合图4,所述最小β值确定单元10中,所述最小β值范围区域是由近期多组最小β值确定的,并可对所述最小β值范围区域进行更新。在本实施例中,在所述纸带o点向测量工位移动时,β值是处于不断变小的过程,最小β值对应的颗粒物浓度值即为纸带o点所富集的颗粒物的浓度值,一旦β值的大小落入最小β值区域时,表示纸带o点所富集的颗粒物的浓度值接近被找到,降低走纸速度,并多次来回走纸,具体地可以在2毫米范围内来回走纸,以确定最小β值c1的大小。最小β值范围区域可根据最新测得的n组最小β值进行更新。图3所示,横轴为纸带位移,纵轴为β值,β值曲线的最低点对应的β值为最小β值。
65.需要说明的是,纸带o点是纸带当前进行颗粒物富集和颗粒物浓度测量的点,即是当前测量点。因此:“近期多组最小β值”,是指纸带o点和在纸带o点之前的近期多个测量点所分别对应的多组最小β值。因此,近期多个测量点对应的多组最小β值是能反应最新空气质量的一组数据。
66.还需要说明的是,本文中,最小β值是指在β射线规避离散性,在其能量最大的瞬间
对准纸带o点,而被纸带o点上富集的颗粒物和纸带本身所遮挡一部分射线后,被检测器检测到的剩余的β射线的通量,定义为最小β值。
67.确定好最小β值后,再根据所述纸带o点的底值β0,能够根据惯用的计算公式计算出纸带o点出的颗粒物浓度值。
68.一个实施例中,较佳者,所述多组最小β值包括β1、β2、β3、β4、β5、
……
、β100,其中β1《β2《β3《β4《β5《
……
《β100。具体地,多组最小β值可以根据历史经验值系统自动更新得到,对β1-β100中任一个β值还可手动输入得到,或者对β1~β100中的任何一个β值进行更新。
69.一个实施例中,所述最小β值确定单元10中,所述对所述最小β值范围区域进行更新,具体地:当所述近期多组最小β值中有n组连续测量的颗粒物浓度值均小于β1时,或者n组连续测量的颗粒物浓度值均大于β100时,根据所述n组连续测量的颗粒物浓度值的平均值βa对所述最小β值范围区域进行更新。不难理解地,最小β值若是确定,则能计算出纸带o点(当前测量点)所富集的颗粒物浓度值,因此确定最小β值,即是能够计算出纸带o点所富集的颗粒物浓度值。由于,环境空气的质量(环境空气所含有的颗粒物的浓度值)是处于不断变化的,因此需要对所述最小β值范围区域进行更新,其中在本实施例中,最小β值区域范围是指β值落入β1-β100范围内的β值。
70.所述最小β值确定单元10中,当所述近期多组最小β值中有n组连续测量的颗粒物浓度值均小于β1或大于β100时,根据所述n组连续测量的颗粒物浓度值的平均值βa对所述最小β值范围区域进行更新。
71.在本实施例中,当根据近期测量的多组数据来看,所述近期多组最小β值中若有n组连续测量的颗粒物浓度值均小于β1,可见空气质量是处于变差过程中,若有n组连续测量的颗粒物浓度值均大于β100,可见空气质量是处于变好过程,为了能够快速地测出纸带o点的最小β值,需要对β1-β100中的部分或者所有数值进行替换和更新。
72.所述最小β值确定单元10中,当所述近期多组最小β值中有n组连续测量的颗粒物浓度值均小于β1或大于β100时,所述根据所述n组连续测量的颗粒物浓度值的平均值βa对所述最小β值范围区域进行更新,具体是,将所述βa对β1~β100中的任一个β值进行更新。
73.所述驱动电机为伺服电机,最小β值确定单元10中,所述待β值在最小β值范围区域时,多次来回走纸以确定最小β值c1的大小,具体是所述待β值在最小β值范围区域时,所述伺服电机降低走纸的速度,在左右5毫米的区域内多次来回走纸以确定最小β值c1的大小。β射线由于其自身的物理特性,即是离散性。在现有技术的控制系统,很难将纸带o点由富集点走纸到测量点的前提下,一两次来回走纸,很难准确地确定纸带o点的最小β值,只有多次来回走纸,才能准确地规避β射线的离散性,让纸带o点,完全地经过测量点,并在β射线能量最大时穿过纸带o点,从而准确地测出准确的最小β值。
74.以上所揭露的仅为本发明的优选实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明申请专利范围所作的等同变化,仍属本发明所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1