一种金针菇自动摘取-切根-配重及包装系统的制作方法
1.本发明涉及一种自动化金针菇生产线。
背景技术:
2.目前绝大多数的金针菇加工工厂都是采用人工方式实现生产。每颗金针菇插在一个营养瓶内,并且在外部套有保护罩。生产时,将保护罩去除后,从根部将金针菇整颗切断,从而将整颗金针菇从营养瓶内取出。取出后将金针菇包装在包装袋内,每个包装袋内一般放置多颗金针菇,且包装时需要尽量确保每个包装袋内金针菇的总重量大体相同。上述工序全部完成后,即实现了金针菇的加工。
3.采用人工方式进行金针菇生产,不仅生产线工位较多、操作繁琐,而且在包装时人工称重效率低、误差大。现有的金针菇加工生产效率已经不能满足日益增长的作业需求。
技术实现要素:
4.本发明的目的是:提供一种全自动的金针菇生产设备。
5.为了达到上述目的,本发明的技术方案是提供了一种金针菇自动摘取-切根-配重及包装系统,用于完成对插在营养瓶内且外部套有保护罩的金针菇的自动摘取、切根、配重及包装,将插有金针菇的营养瓶进一步定义为带物料营养瓶,将完成金针菇摘取的营养瓶进一步定义为空营养瓶,其特征在于,包括送料及托盘回收单元、机械手、配重打散单元和热缩包装单元;
6.沿金针菇的输送方向,送料及托盘回收单元、配重打散单元和热缩包装单元依序设置;将金针菇的输送方向定义为前、后方向,在金针菇的输送平面内与前、后方向相垂直的方向定义为左、右方向,将垂直于金针菇的输送平面的方向定义为上、下方向,则在送料及托盘回收单元以及配重打散单元的左右两侧分别布置有一台机械手;
7.送料及托盘回收单元,用于提供装有带物料营养瓶的托盘以及回收装有空营养瓶的托盘;
8.机械手将送料及托盘回收单元上同侧的金针菇外部的保护罩取下,并将金针菇从根部切断,完成整颗金针菇的摘取,机械手将摘取下的金针菇送至配重打散单元;
9.配重打散单元包括传送单元、打散单元以及称重单元,其中:
10.机械手将金针菇放置在传送单元及打散单元上;在称重单元中预先设定重量阈值w
thr
,重量阈值w
thr
大于至少两颗整颗金针菇的重量;
11.第n次工作流程开始时,由称重单元发送信号给传送单元,使得传送单元启动;传送单元启动后,向称重单元输送整颗金针菇,称重单元实时称取传送单元输送过来的所有n颗整颗金针菇的重量wn;若wn《w
thr-w,则传送单元继续向称重单元输送整颗金针菇,w为一整颗金针菇的平均重量;若w
thr-w≤wn《w
thr
,则称重单元向传送单元发送信号,使传送单元停止工作,同时,称重单元向打散单元发送信号,使打散单元开始工作;
12.打散单元开始工作后,将其上的整颗金针菇打散为零散金针菇,并将零散金针菇
输送至称重单元,由称重单元实时称取零散金针菇的重量ws;若wn+ws《w
thr
,则打散单元继续向称重单元输送零散金针菇,直至wn+ws达到w
thr
,此时,称重单元向打散单元发送信号,使打散单元停止工作,通过打散单元达到补齐称重单元所需金针菇重量的目的;
13.称重单元将达到所需金针菇重量的整颗金针菇及零散金针菇输送至热缩包装单元,完成第n次工作流程,实现第n批金针菇的配重
14.由热缩包装单元对配重完成的金针菇依批次进行自动包装处理。
15.优选地,所述送料及托盘回收单元分包括位于上层的金针菇送料结构以及位于下层的托盘回收结构,在金针菇送料结构与托盘回收结构之间有翻转滚筒机构,翻转滚筒机构位于金针菇送料结构及托盘回收结构与所述配重打散单元之间;
16.放置有带物料营养瓶的托盘通过金针菇送料结构被送至翻转滚筒机构;翻转滚筒机构每次仅能承载一个托盘,当前托盘完全落入翻转滚筒机构后,由左右两侧的所述机械手完成整颗金针菇的摘取;完成当前托盘上所有金针菇的摘取后,翻转滚筒机构向下翻转,使得当前托盘滑落在托盘回收结构上,由托盘回收结构实现对托盘的回收。
17.优选地,所述滚筒翻转机构包括承料平台,金针菇送料结构送来的托盘落在承料平台上,滚筒翻转机构向下翻转后,承料平台上的托盘滑落至托盘回收结构;承料平台的左右两侧分别设有一块挡板,通过两侧的挡板实现托盘左右方向的限位;承料平台铰接在立柱的顶端,立柱顶部有调节支脚;第一气缸的缸体铰接在立柱的中部,伸缩端铰接在承料平台的底面,由第一气缸驱动承料平台翻转;立柱顶部还设有第一光电开关,当托盘完全落在承料平台上后,触发第一光电开关,使得左右两侧的机械手开始动作。
18.优选地,所述机械手包括机械手本体、翻转机构以及三轴位移机构;
19.由三轴位移机构带动翻转机构以及机械手本体沿上下方向、左右方向以及前后方向移动;
20.翻转机构用于带动机械手本体实现上下翻转;
21.机械手本体包括切割刀底座,切割刀底座上设有n个金针菇抓手、n个吸盘以及一个切割刀,n≥2;n个金针菇抓手以及n个吸盘位于切割刀底座的左侧面或右侧面,正对同侧的金针菇,每个金针菇抓手用于抓取同侧的整颗金针菇;每个金针菇抓手的上方有一个吸盘,用于吸取套在金针菇外的保护套;切割刀设于切割刀底座的底部,切割刀能够在切割刀底座沿前后方向移动,从而将被n个金针菇抓手所抓取的所有n颗金针菇抓手的根部切断。
22.优选地,所述三轴位移机构由伺服电机驱动,实现所述机械手本体的精确定位。
23.优选地,所述传送单元包括挡边输送带一,挡边输送带一上沿前后方向均布有多块横向隔板一,每块横向隔板一在左右方向上横跨整颗金针菇传送带一;相邻两块横向隔板一之间放置有两颗所述金针菇,每两颗金针菇头部相对放置;
24.称重单元向第二光电开关发送信号,使得挡边输送带一停止向所述称重单元输送金针菇,或使得挡边输送带一开始向所述称重单元输送金针菇。
25.优选地,所述打散单元位于所述传送单元的上方,称重单元向第三光电开关发送信号,使得所述打散单元开始工作或停止工作。
26.优选地,所述打散单元包括挡边输送带二,挡边输送带二上沿前后方向均布有多块横向隔板二,每块横向隔板二在左右方向上横跨挡边输送带二;相邻两块横向隔板二之间形成容置空间,该容置空间中部设有纵向隔板,从而将当前容置空间分隔为两个子容置
空间,每个子容置空间内放置一颗金针菇;位于同一个容置空间内的两颗金针菇的头部相对放置,靠近纵向隔板;
27.挡边输送带二左右两侧分别布置有多组打散切刀,在每个容置空间的左右两侧分别布置有一组打散切刀,由第三气缸驱动打散切刀沿左右方向移动,使得打散切刀自根部切入同侧的相应子容置空间内的金针菇,从而将金针菇切散;由挡边输送带二将切散后的金针菇向前输送;在挡边输送带二的尽头,切散后的金针菇在重力作用下下落至锯齿传送带,切散后的金针菇跌落在锯齿传送带上的同时被打散,成为零散金针菇;由锯齿传送带将零散金针菇继续向前输送;在锯齿传送带的尽头,零散金针菇在自身重力的作用下下落至称重单元,由称重单元实时称取所有下落的零散金针菇的重量ws。
28.优选地,每组所述打散切刀由j
×
k个相互紧靠排列成方阵的矩形方牙切刀组成,每个矩形方牙切刀为中空的长方体结构;该长方体结构的一面完成敞开,定义为敞开面,敞开面与长方体结构的中空腔体相接,敞开面的四周边缘为切刃。
29.优选地,所述称重单元具有称重传送带,传送单元送来的全部n颗整颗金针菇以及打散单元送来的用于补齐重量的零散金针菇均位于称重传送带上;在称重传送带的尽头设置有在减速电机控制下可上升、下降的阻挡板;仅在wn+ws达到w
thr
时,减速电机控制阻挡板下降,称重传送带将其上的整颗金针菇以及零散金针菇向前输送至所述热缩包装单元,至此第n次工作流程结束;在其他情况下,阻挡板均处于上升状态。
30.本发明提供的一种金针菇自动摘取-切根-配重及包装系统,集自动摘取-切根-配重-包装功能为一体,有效提高金针菇生产线的自动化程度,很好地解决了现有的金针菇生产线工位复杂、人工成本高、效率差等问题,并且可以根据生产需求配置多条生产线,大大提高了生产效率。
附图说明
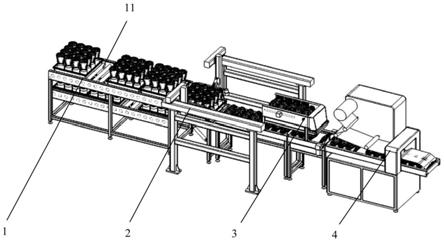
31.图1为本发明的结构示意图;
32.图2为本发明的主视结构示意图;
33.图3为本发明的滚筒翻转机构示意图;
34.图4为本发明的机械手结构示意图;
35.图5为本发明机械手的左视图;
36.图6为本发明的配重打散单元结构示意图。
37.附图标记说明:1-送料及托盘回收单元;11-输送滚筒;12-金针菇;13-托盘;14-滚筒支架;15-第一气缸;16-第一光电开关;17-翻转挡板;18-调节支脚;
38.2-机械手;21-第二气缸;22-吸盘;23-金针菇抓手;24-切割刀;25-一轴滑块;26-一轴滑轨;27-二轴滑块;28-二轴滑轨;29-三轴滑轨;
39.3-配重打散单元;31-挡边输送带;32-二光电开关;33-第三气缸;34-打散切刀;35-第三光电开关;36-锯齿传送带;37-阻挡板;38-减速电机;
40.4-热缩包装单元。
具体实施方式
41.下面结合具体实施例,进一步阐述本发明。应理解,这些实施例仅用于说明本发明
而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本技术所附权利要求书所限定的范围。
42.如图1及图2所示,本发明提供的一种金针菇自动摘取-切根-配重及包装系统包括送料及托盘回收单元1、机械手2、配重打散单元3和热缩包装单元4。
43.沿金针菇12的输送方向,送料及托盘回收单元1、配重打散单元3和热缩包装单元4依序设置。本发明中,将金针菇12的输送方向定义为前、后方向,在金针菇12的输送平面内与前、后方向相垂直的方向定义为左、右方向,将垂直于金针菇12的输送平面的方向定义为上、下方向。则在送料及托盘回收单元1以及配重打散单元3的左右两侧分别布置有一台机械手2。
44.通过本发明完成对插在营养瓶内且外部套有保护罩的金针菇12的自动摘取、切根、配重及包装,本发明中,将插有金针菇12的营养瓶进一步定义为带物料营养瓶,将完成金针菇12摘取的营养瓶进一步定义为空营养瓶,则有:
45.送料及托盘回收单元1分为上下两层,上层为金针菇送料结构,下层为托盘回收结构,在金针菇送料结构与托盘回收结构之间有翻转滚筒机构,翻转滚筒机构位于金针菇送料结构及托盘回收结构与配重打散单元3之间。
46.放置有带物料营养瓶的托盘13通过金针菇送料结构被送至翻转滚筒机构。翻转滚筒机构每次仅能承载一个托盘13,当前托盘13完全落入翻转滚筒机构后,由左右两侧的机械手2将同侧的金针菇12外部的保护罩取下,并将金针菇12从根部切断,完成整颗金针菇12的摘取。完成当前托盘13上所有金针菇12的摘取后,翻转滚筒机构向下翻转,使得当前托盘13滑落在托盘回收结构上,由托盘回收结构将其送出本发明提供的系统,从而实现对托盘13的回收。
47.送料及托盘回收单元1包括滚筒支架14,金针菇送料结构及托盘回收结构均固定在滚筒支架14上,翻转滚筒机构则位于滚筒支架14与配重打散单元3之间。金针菇送料结构包括上输送滚筒11,由上输送滚筒11将装有带物料营养瓶的托盘13送至翻转滚筒机构。托盘回收结构包括下输送滚筒,翻转滚筒机构向下翻转后,托盘13滑落至下输送滚筒上,由下输送滚筒将托盘13送出本发明。
48.结合图3,滚筒翻转机构包括承料平台,金针菇送料结构送来的托盘13落在承料平台上,滚筒翻转机构向下翻转后,承料平台上的托盘13滑落至托盘回收结构。承料平台的左右两侧分别设有一块挡板17,通过两侧的挡板17实现托盘13左右方向的限位。承料平台铰接在立柱的顶端,立柱顶部有调节支脚18。第一气缸15的缸体铰接在立柱的中部,伸缩端铰接在承料平台的底面,由第一气缸15驱动承料平台翻转。立柱顶部还设有第一光电开关16,当托盘13完全落在承料平台上后,触发第一光电开关16,使得左右两侧的机械手2开始动作。
49.结合图4及图5,机械手2包括机械手本体、翻转机构以及三轴位移机构。由三轴位移机构带动翻转机构以及机械手本体沿上下方向、左右方向以及前后方向移动。翻转机构则带动机械手本体实现上下翻转。
50.机械手本体包括切割刀底座,切割刀底座上设有n个金针菇抓手23、n个吸盘22以及一个切割刀24,n≥2。n个金针菇抓手23以及n个吸盘22位于切割刀底座的左侧面或右侧
面,正对同侧的金针菇12。每个金针菇抓手23的上方有一个吸盘22。切割刀24设于切割刀底座的底部。
51.每个金针菇抓手23用于抓取同侧的整颗金针菇12。吸盘22则用于吸取套在金针菇12外的保护套。切割刀24则在切割刀底座沿前后方向移动,从而将被n个金针菇抓手23所抓取的所有n颗金针菇抓手23的根部切断。n颗金针菇抓手23的根部被切断后,由机械手2将金针菇12送至配重打散单元3。通过翻转机构保证金针菇抓手23起菇后放料的平稳。
52.机械手本体固定在安装底座上,由三轴位移机构带动安装底座移动。
53.翻转机构包括第二气缸21,第二气缸21的两端分别与机械手本体以及安装底座铰接。
54.三轴位移机构由伺服电机驱动,实现机械手本体的精确定位。本实施例中,三轴位移机构包括一轴滑轨26、二轴滑轨28及三轴滑轨29。安装底座配合安装在三轴滑轨29上,由三轴伺服电机驱动安装底座沿三轴滑轨29上下移动。三轴滑轨29固定在二轴滑块27上,二轴滑块27与二轴滑轨28配合安装,由二轴伺服电机驱动二轴滑块27沿二轴滑轨28左右移动。二轴滑轨28固定在一轴滑块25上,一轴滑块25与一轴滑轨26配合安装,由一轴伺服电机驱动一轴滑块25沿一轴滑轨26前后移动。
55.如图6所示,配重打散单元3进一步分为传送单元、打散单元、称重单元。
56.利用机械手2将金针菇12放置在传送单元以及打散单元上。传送单元用于将金针菇12传输至称重单元,由称重单元称取其重量。传送单元包括挡边输送带一31,挡边输送带一31上沿前后方向均布有多块横向隔板一,每块横向隔板一在左右方向上横跨挡边输送带一31。相邻两块横向隔板一之间放置有两颗金针菇12,这两颗金针菇12头部相对放置。
57.在称重单元中预先设定重量阈值w
thr
,重量阈值w
thr
大于至少两颗金针菇12的重量之和。挡边输送带一31将其上的金针菇12送往称重单元,称重单元实时获得送来的所有n颗金针菇12的重量wn。若wn《w
thr-w,则挡边输送带一31继续向称重单元输送金针菇12,w为一整颗金针菇12的平均重量。若w
thr-w≤wn《w
thr
,则称重单元向第二光电开关32发送信号,使得挡边输送带一31停止向向称重单元输送金针菇12,同时,称重单元向第三光电开关35发送信号,使得打散单元开始工作。
58.打散单元包括挡边输送带二,挡边输送带二上沿前后方向均布有多块横向隔板二,每块横向隔板二在左右方向上横跨挡边输送带二。相邻两块横向隔板二之间形成容置空间,该容置空间中部放置有纵向隔板,从而将当前容置空间分隔为两个子容置空间,每个子容置空间内放置一颗整颗金针菇12。位于同一个容置空间内的两颗整颗金针菇12的头部相对放置,靠近纵向隔板。
59.挡边输送带二左右两侧分别布置有多组打散切刀34,在每个容置空间的左右两侧分别布置有一组打散切刀34。每组打散切刀34由j
×
k个相互紧靠排列成方阵的矩形方牙切刀组成,每个矩形方牙切刀为中空的长方体结构。该长方体结构的一面完成敞开,定义为敞开面,敞开面与长方体结构的中空腔体相接,敞开面的四周边缘为切刃。由第三气缸33驱动打散切刀34沿左右方向移动。
60.打散单元开始工作后,第三气缸33驱动打散切刀34,使得打散切刀34自根部切入同侧的相应子容置空间内的整颗的金针菇12,从而将整颗的金针菇12切散。随后挡边输送带二将切散后的金针菇12向前输送。在挡边输送带二的尽头,切散后的金针菇12在重力作
用下下落至锯齿传送带36,切散后的金针菇12跌落在锯齿传送带36上的同时被打散,成为零散金针菇,由锯齿传送带36将零散金针菇继续向前输送。在锯齿传送带36的尽头,零散金针菇在自身重力的作用下下落至称重单元,由称重单元实时称取所有下落的零散金针菇的重量ws。若wn+ws《w
thr
,则锯齿传送带36继续向前输送零散金针菇,直至wn+ws达到w
thr
,此时,称重单元向第三光电开关35发送信号,使得打散单元停止工作。通过打散单元达到补齐称重单元所需金针菇重量的目的。
61.称重单元具有称重传送带,传送单元送来的全部n颗金针菇12以及打散单元送来的用于补齐重量的零散金针菇均位于称重传送带上。在称重传送带的尽头设置有在减速电机38控制下可上升、下降的阻挡板37。仅在wn+ws达到w
thr
时,减速电机38控制阻挡板37下降,称重传送带将其上的整颗的金针菇12以及零散金针菇向前输送至热缩包装单元4,至此一个工作流程结束。在其他情况下,阻挡板37均处于上升状态。
62.称重单元实时获得的重量清零后,表示下一个工作流程将要开始,此时,称重单元向第二光电开关32发送信号,使得挡边输送带一31重新向称重单元输送金针菇12。
63.配重打散单元3完成当前一批金针菇12的配重后,由热缩包装单元4对配重完成的金针菇12进行自动包装处理。配重打散单元3包括传送带和枕式包装机,由传送带将完成配重的金针菇12分批次送至枕式包装机,由枕式包装机完成每批次金针菇12的自动包装。
64.本发明的工作原理如下;
65.第一)将带有物料的营养瓶并排放置在托盘13上后,由金针菇送料结构将托盘13传送到翻转滚筒机构处。左右两侧的机械手2完成对金针菇12的处理后,翻转滚筒机构向下翻转把装有空营养瓶的托盘13转移到托盘回收结构上,回收托盘13。
66.机械手2对金针菇12的处理包括以下步骤:
67.利用吸盘22摘取金针菇12外面的保护罩,金针菇抓手23用于起菇,切割刀24负责对金针菇12进行切根,随后将金针菇12转移到配重打散单元3上。
68.第二)由配重打散单元3实现对每一批次金针菇12的配重。
69.第三)当金针菇12配重完成后,由传送带送至枕式包装机,由枕式包装机完成自动包装。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1