一种用于起重机上平衡梁固定的连接结构及连接方法与流程
1.本发明涉及起重机相关技术领域,具体为一种用于起重机上平衡梁固定的连接结构及连接方法。
背景技术:
2.平衡梁作为起重吊机的重要组成零部件,在重物起吊的过程中起到了相当程度的承力作用,根据受力分析可知,在起吊的过程中吊钩或者连接重物的吊绳所在方向越靠近重物的重力方向,吊钩或者连接重物的吊绳所受牵引力便越接近重物的重力,从而能够降低吊钩和吊绳所受的牵引力,可以有效防止出现吊钩和吊绳出现断裂的情况,并且能够相应的增加吊机吊装重物的质量范围,但是现有起重机侧面的吊钩和吊绳均为固定,使得吊钩和吊绳在工作过程中所受牵引力较大,使得吊装重物的质量范围难以得到提升,因此特提出一种吊钩和吊绳位置能够进行调整的用于起重机上平衡梁固定的连接结构,以解决上述问题。
技术实现要素:
3.本发明的目的在于提供一种用于起重机上平衡梁固定的连接结构及连接方法,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:一种用于起重机上平衡梁固定的连接结构,包括起重臂本体,起重臂本体顶面的中心处一体设置有承重梁,起重臂本体的内部开设有活动腔,活动腔的内部滑动安装有活动块,活动块的底面固定有吊钩,吊钩的端部延伸至活动腔的外侧,方便与货物之间进行固定。
5.位于活动腔内部的活动块设置有两个,且两个活动块之间通过牵引绳连接有收缩转盘,两个活动块相远离的一端分别通过牵引绳连接复位转盘,活动腔的内部安装有为收缩转盘和复位转盘提供动力的电机,为活动块之间的相对运动提供动力。
6.在进一步的实施例中,两个活动块在活动腔的内部对称设置,牵引绳分别绕接在收缩转盘和复位转盘的外壁,活动腔底侧的内壁一体设置有多个齿,活动块的底侧与其相匹配,活动块相远离的两个侧面均开设有活动孔,活动孔的内部安装有伸缩块,伸缩块延伸至活动孔外部一端的侧面转动安装有齿轮,齿轮与齿相匹配,能够对活动块于活动腔内部的位置进行固定,保证货物吊装过程中的稳定性。
7.在进一步的实施例中,活动孔为l型结构,且活动孔l型的一端与活动块的外侧贯通,活动孔端部处的内壁和伸缩块的端部之间分别固定有电磁铁和永磁铁,电磁铁和永磁铁正对面的磁性相同,电磁铁的输入端通过导线连接有逻辑控制器,逻辑控制器的输出端通过导线与为收缩转盘和复位转盘提供动力电机的输入端连接,可以实现活动块与活动腔内壁之间的腾空,防止对活动块与活动腔之间的固定状态进行解除,同时利用逻辑控制器使得活动块的移动更加地智能。
8.在进一步的实施例中,活动块相远离的两侧靠近端部处开设有测量孔,测量孔的
内部安装有测量杆,测量杆伸出测量孔的端部转动安装有滚珠,活动腔的内壁开设有滑道,滑道与起重臂本体的中心轴所在方向齐平,滚珠的外壁与滑道的内壁贴合,测量孔的内壁固定有压力传感器,压力传感器的测量端与测量杆端部的侧面之间安装有压缩弹簧,且活动块的底面为弧形结构,可以放大活动块两端压力之间的差异性,有利于对活动块两端压力的差异性进行测量。
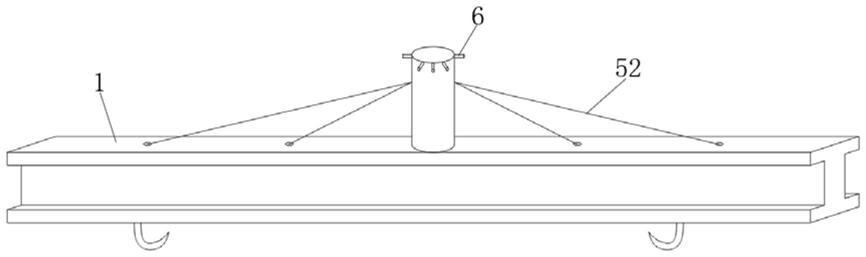
9.在进一步的实施例中,起重臂本体的顶面开设有多个等距分布的转孔,转孔的内部转动安装有转珠,转珠的外壁固定有钢缆,钢缆远离转珠的一端与承重梁的外壁固定,多个钢缆在承重梁的外壁汇聚成一点,提升起重臂本体的应力,提升其载重。
10.在进一步的实施例中,承重梁的顶端与吊臂转动连接,吊臂的外壁转动安装有涡轮蜗杆,承重梁顶端处的外壁转动安装有多个转杆,多个转杆在承重梁的外壁环形等距分布,转杆远离承重梁的一端延伸至涡轮蜗杆外壁螺旋型槽的内部,涡轮蜗杆的中心轴所在方向与承重梁的中心轴所在方向垂直,且转杆沿承重梁的径向设置。
11.一种用于起重机上平衡梁固定的连接结构及连接方法,具体包括如下步骤:
12.t1、两个活动块通过收缩转盘和复位转盘能够在活动腔的内部滑动,改变吊钩之间的相对位置,进而能够改变吊钩所受牵引力的方向,能够尽可能地使吊钩受的牵引力靠近竖直方向,以减小吊钩的受力,从而提升平衡梁的设计承重,提升吊装重物的质量范围;
13.t2、利用活动块底面与活动腔底面齿之间的贴合,能够实现活动块于活动腔内部位置的固定,从而保证重物吊装过程中的稳定性,利用电磁铁和永磁铁使得伸缩块带动齿轮对活动块进行支撑,实现活动块与活动腔底侧齿之间的腾空,进而使得活动块能够在活动腔的内部进行较为顺畅的滑动;
14.t3、利用测量杆和压力传感器以及压缩弹簧,能够间接性地判断出活动块在承受牵引力时,牵引力偏离竖直方向的方向,从而有利于逻辑控制器进行较为精准地控制电机使活动块滑动,从而调整活动块的位置,能够减小挂钩所受牵引力与竖直方向之间的夹角。
15.与现有技术相比,本发明的有益效果是:
16.本发明中记载了一种用于起重机上平衡梁固定的连接结构及连接方法,通过电机带动复位转盘以及收缩转盘的转动,可以改变两个活动块之间的相对位置以及活动块在活动腔内部的位置,进而使得吊钩对重物施加的牵引力能够更加接近竖直方向,可以有效减小吊钩受到的应力,提升吊装重物的质量范围,并且能够有效防止出现吊钩出现断裂的情况。
17.利用承重梁和起重臂本体之间的钢缆,能够对起重臂本体所受到的应力进行分担,能够提升起重臂本体可受应力的范围,同时还能够有效防止出现起重臂本体出现形变的情况,利用压力传感器能够较为精准且快速地对吊钩的应力方向进行判断,从而可以利用逻辑控制器对活动块位置的调整进行较为精准的改变,减少劳动力的投入,提升工作效率。
附图说明
18.图1为本发明实施例起重臂本体结构图;
19.图2为本发明实施例起重臂本体正剖图;
20.图3为本发明实施例图2中a处结构放大图;
21.图4为本发明实施例活动块剖视图;
22.图5为本发明实施例图4中b处结构放大图;
23.图6为本发明实施例活动块侧剖图。
24.图中:1、起重臂本体;2、活动腔;21、齿;3、活动块;31、活动孔;32、伸缩块;33、电磁铁;34、永磁铁;35、测量孔;36、测量杆;37、滚珠;38、滑道;4、收缩转盘;41、复位转盘;5、转孔;51、转珠;52、钢缆;6、转杆。
具体实施方式
25.在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
26.实施例1
27.请参阅图1
‑
6,本实施例提供了一种用于起重机上平衡梁固定的连接结构,包括起重臂本体1,起重臂本体1顶面的中心处一体设置有承重梁,承重梁的两端分别连接抬升设备和起重臂本体1,起重臂本体1一般为工字型结构,能够减少制造用料,在保证自身强度的情况下减少自重,进而减少货物抬升过程中抬升设备所需要输出的功率,更加环保节能。
28.为了使吊钩的位置可调,起重臂本体1的内部开设有活动腔2,活动腔2的内部滑动安装有活动块3,活动块3的底面固定有吊钩,吊钩的端部延伸至活动腔2的外侧,活动腔2为活动块3的滑动提供空间。
29.位于活动腔2内部的活动块3设置有两个,且两个活动块3之间通过牵引绳连接有收缩转盘4,两个活动块3相远离的一端分别通过牵引绳连接复位转盘41,活动腔2的内部安装有为收缩转盘4和复位转盘41提供动力的电机。
30.其中,牵引绳分别绕接在收缩转盘4和复位转盘41的外壁,收缩转盘4转动时,通过拉动牵引绳可以使两个活动块3同步相向运动,两个复位转盘41独自转动,可以使得活动块3之间相离运动,但是为了保证货物在提升过程中更加地平稳,为复位转盘41提供动力的电机的启停同步,因此两个活动块3可以在活动腔2的内部保持对称,并且能够同步地相互远离和相互靠近。
31.为了实现活动块3于活动腔2内部位置的固定,活动腔2底侧的内壁一体设置有多个齿21,活动块3的底侧与其相匹配,活动块3底侧与齿21之间的贴合,能够实现对活动块3于活动腔2内部位置的固定。
32.为了使活动块3能够在活动腔2的内部滑动,活动块3相远离的两个侧面均开设有活动孔31,活动孔31的内部安装有伸缩块32,伸缩块32延伸至活动孔31外部一端的侧面转动安装有齿轮,齿轮与齿21相匹配。
33.其中,活动孔31为l型结构,且活动孔31l型的一端与活动块3的外侧贯通,活动孔31端部处的内壁和伸缩块32的端部之间分别固定有电磁铁33和永磁铁34,电磁铁33和永磁铁34正对面的磁性相同,电磁铁33的输入端通过导线连接有逻辑控制器,逻辑控制器的输出端通过导线与为收缩转盘4和复位转盘41提供动力电机的输入端连接。
34.永磁铁34通电后,电磁铁33和永磁铁34之间产生排斥力,伸缩块32通过在活动孔
31内部的滑动,使得齿轮能够抵在活动腔2设有齿21的内壁,并且使得活动块3的底面与活动腔2的内壁腾空,之后利用牵引绳的拉动,能够实现活动块3在活动腔2内部的滑动。
35.优选的,待活动块3的位置调整好之后,电磁铁33的电源被断开,在现有技术中电磁铁33多为铁芯外壁缠绕线圈型结构,因此永磁铁34能够对电磁铁33产生引力,从而使得伸缩块32能够拉动齿轮与活动腔2内壁的齿21分离,之后借助活动块3的底面与活动腔2内壁之间的贴合,实现活动块3于活动腔2内部位置的固定。
36.为了能够为活动块3位置的调整提供基准或者参考位置,活动块3相远离的两侧靠近端部处开设有测量孔35,测量孔35的内部安装有测量杆36,测量孔35的内壁固定有压力传感器,压力传感器的测量端与测量杆36端部的侧面之间安装有压缩弹簧,且活动块3的底面为弧形结构。
37.吊钩在与重物接触并进行试举时,由于活动块3受拉力,使得其端部的外壁与活动腔2之间的压力是不同的,压力传感器与测量杆36之间的配合,能够对这样的压力进行测量,通过对活动块3两端处压力的比较,便能够得出吊钩牵引力方向与竖直方向之间所偏离的方向,之后利用活动块3在活动腔2内部的滑动,能够相应地减小吊钩牵引力方向与重力方向夹角变小。
38.其中,测量杆36伸出测量孔35的端部转动安装有滚珠37,活动腔2的内壁开设有滑道38,滑道38与起重臂本体1的中心轴所在方向齐平,滚珠37的外壁与滑道38的内壁贴合,滚珠37能够减少测量杆36与滑道38之间的摩擦力,使得两者之间相对滑动的更加顺畅,同时还能够防止摩擦力影响压力测量的准确性。
39.实施例2
40.请参阅图1
‑
2,在实施例1的基础上做了进一步改进:一般情况下,起重臂本体1在使用过程中不会出现形变的情况,但是由于具有一定规格的起重臂本体1的载重是有限的,因此为了能够进一步地提升起重臂本体1的载重,起重臂本体1的顶面开设有多个等距分布的转孔5,转孔5的内部转动安装有转珠51,转珠51的外壁固定有钢缆52,钢缆52远离转珠51的一端与承重梁的外壁固定,多个钢缆52在承重梁的外壁汇聚成一点。
41.钢缆52能够对起重臂本体1的承力进行分担,可以进一步提升起重臂本体1的载重量,转孔5内部的转珠51可以自由转动,一旦起重臂本体1发生形变或者具有形变的趋势时,通过转珠51在转孔5内部的转动,能够改变钢缆52牵引力的方向,从而防止起重臂本体1的形变或者进一步地形变。
42.承重梁的顶端与吊臂转动连接,吊臂的外壁转动安装有涡轮蜗杆,承重梁顶端处的外壁转动安装有多个转杆6,多个转杆6在承重梁的外壁环形等距分布,转杆6远离承重梁的一端延伸至涡轮蜗杆外壁螺旋型槽的内部,涡轮蜗杆的中心轴所在方向与承重梁的中心轴所在方向垂直,且转杆6沿承重梁的径向设置。
43.一般情况下,货物在吊装过程中会进行一个方向的改变,现有的方式是直接在承重梁你和吊臂之间安装驱动电机,承重梁和起重臂本体1在转动过程中具有较大的动量,且不易停止,因此存在着一定的安全隐患。
44.利用涡轮蜗杆转动时,转杆6与其之间相对运动的距离为定值,因此能够作为承重梁和吊臂之间的驱动装置,使承重梁转动的启动更加地顺畅且稳定,并且利用涡轮蜗杆单向传动的特性,还能够有效防止出现气流扰动起重臂本体1发生自转的情况。
45.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1