一种开合盖控制方法及智能垃圾桶与流程
1.本发明涉及垃圾桶技术领域,具体涉及一种开合盖控制方法及智能垃圾桶。
背景技术:
2.随着技术的进步以及人们生活质量的提高,家用垃圾桶产品也向着智能化的方向发展。现有技术中已有可以通过感应而实现开盖和关盖的智能垃圾桶。正常情况下,垃圾桶的桶盖是一开一关交替进行的,因此控制开合盖的程序设置为一开一关交替进行即可。然而,在实际使用当中常常会遇到一些异常情况,例如,存在这种情形:在开盖过程中,由于受到杂物堵塞或是外力阻挡,盖体并没有完全打开,而用户想让盖体进一步打开,而由于盖体已经执行过打开动作,用户欲触发盖体进一步打开时反会触发盖体关闭,影响用户的使用体验。再例如,现实中还存在这种情形:在盖体处于打开状态时,由于盖体受外力或自身重力等原因,盖体非程序控制的正常关闭;此时实际上盖体已是闭合状态,但控制器中记录的盖体还是处于打开状态,如此,当用户再次触发开盖时,控制器会控制盖体关闭,影响用户的使用体验且具有导致盖体损坏的风险。
3.鉴于此,有必要提出一种新的技术方案,以解决上述技术问题。
技术实现要素:
4.本发明提供一种开合盖控制方法及智能垃圾桶,以解决开盖被误触发为关闭的问题。
5.本发明通过如下技术方案实现:一种开合盖控制方法,应用于智能垃圾桶,其中,所述智能垃圾桶包括基体、可相对于所述基体开合的盖体、用于检测盖体是否处于打开到位位置的打开到位传感器、用于检测盖体是否处于闭合到位位置的闭合到位传感器,以及用于触发盖体打开或闭合的开合盖传感器,所述开合盖控制方法包括:
6.根据打开到位传感器检测到的信息和所述闭合到位传感器检测到的信息判断所述盖体当前是否处于打开到位位置或闭合到位位置;
7.若所述盖体当前既不处于打开到位位置也不处于闭合到位位置,则在开合盖传感器检测到触发条件时,控制所述盖体打开。
8.作为本技术进一步改进的技术方案,若所述盖体当前处于打开到位位置,则在开合盖传感器检测到触发条件时,控制所述盖体闭合;若所述盖体当前处于闭合到位位置,则在开合盖传感器检测到触发条件时,控制所述盖体打开。
9.本发明还通过如下技术方案实现:一种开合盖控制方法,应用于智能垃圾桶,其中,所述智能垃圾桶包括基体、可相对于所述基体开合的盖体、用于检测盖体是否处于打开到位位置的打开到位传感器,以及用于触发盖体打开或闭合的开合盖传感器,所述开合盖控制方法包括步骤s1:根据打开到位传感器检测到的信息判断所述盖体当前是否处于打开到位位置;若是,则在开合盖传感器检测到触发条件时,控制所述盖体闭合;若否,则在开合盖传感器检测到触发条件时,控制所述盖体打开。
10.作为本技术进一步改进的技术方案,所述智能垃圾桶还包括用于检测盖体是否处于闭合到位位置的闭合到位传感器,所述开合盖控制方法包括步骤s2:根据闭合到位传感器检测到的信息判断所述盖体当前是否处于闭合到位位置;若是,则在开合盖传感器检测到触发条件时,控制所述盖体打开;若否,则执行步骤s1。
11.本发明还提供一种智能垃圾桶,包括基体和可相对于所述基体开合的盖体,其中,所盖体的开合采用如上所述的开合盖控制方法。
12.作为本技术进一步改进的技术方案,所述打开到位传感器和所述闭合到位传感器均为磁感应元件,所述盖体上设有磁性件,在盖体开合过程中,所述磁性件在所述打开到位传感器和闭合到位传感器之间运动。
13.作为本技术进一步改进的技术方案,所述磁感应元件为霍尔传感器,所述磁性件为永磁体。
14.作为本技术进一步改进的技术方案,所述盖体设有转动部,所述转动部与所述基体枢转连接,所述磁性件设于所述转动部上。
15.作为本技术进一步改进的技术方案,所述基体上设有位于所述转动部同一侧的并排设置第一支座和第二支座,所述磁性件设于所述转动部的朝向所述第一支座和第二支座的侧壁上,所述打开到位传感器设于第一支座上,所述闭合到位传感器设于第二支座上。
16.作为本技术进一步改进的技术方案,所述开合盖传感器为红外传感器。
17.本发明提供的开合盖控制方法,根据打开到位传感器检测到的信息判断所述盖体当前是否处于打开到位位置,若盖体处于打开到位位置,则下一次触发条件为触发盖体闭合;若盖体不处于打开到位位置,则可以判断盖体处于闭合到位位置或是处于半开位置,此时则下一次触发条件为盖体打开,避免了应开盖而被误触发为关闭的问题。
附图说明
18.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
19.图1是本发明开合盖控制方法一实施例的流程图。
20.图2是本发明开合盖控制方法另一实施例的流程图。
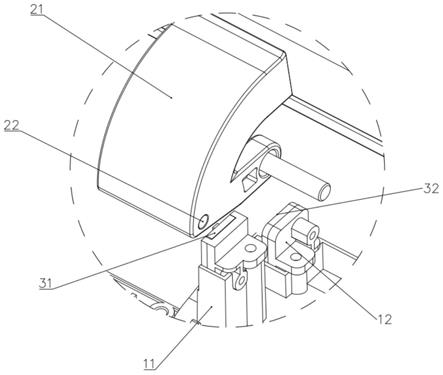
21.图3是本发明智能垃圾桶的盖体处于打开到位位置时的立体分解图。
22.图4是图3中a处的局部放大图。
23.图5是本发明智能垃圾桶的盖体处于闭合到位位置时的立体分解图。
24.图6是图5中b处的局部放大图。
25.附图标号说明:1-基体;11-第一支座;12-第二支座;2-盖体;21-转动部;22-磁性件;31-打开到位传感器;32-闭合到位传感器。
具体实施方式
26.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例
中所描述的实现方式并不代表与本技术相一致的所有实现方式,它们仅是与本技术的一些方面相一致的装置和方法的例子。
27.下面结合附图,对本技术的一种开合盖控制方法及智能垃圾桶进行详细说明。在不冲突的情况下,下述实施例中的特征可以相互组合。
28.请参照图1和图3至图6所示,本技术提供一种开合盖控制方法,应用于智能垃圾桶。所述智能垃圾桶包括基体1、可相对于所述基体1开合的盖体2、用于检测盖体2是否处于打开到位位置的打开到位传感器31、用于检测盖体2是否处于闭合到位位置的闭合到位传感器32,以及用于触发盖体打开或闭合的开合盖传感器(未图示),所述开合盖控制方法包括:根据打开到位传感器31检测到的信息和所述闭合到位传感器32检测到的信息判断所述盖体2当前是否处于打开到位位置或闭合到位位置;若所述盖体2当前既不处于打开到位位置也不处于闭合到位位置,则在开合盖传感器检测到触发条件时,控制所述盖体2打开。
29.进一步的,若所述盖体2当前处于打开到位位置,则在开合盖传感器检测到触发条件时,控制所述盖体2闭合;若所述盖体2当前处于闭合到位位置,则在开合盖传感器检测到触发条件时,控制所述盖体2打开。
30.本发明的该实施例中,通过在打开到位位置和闭合到位位置均设置传感器,可以检测出盖体2的三种位置状态:打开到位位置、闭合到位位置,以及打开到位位置与闭合到位位置之间的其他位置。若打开到位传感器31检测到盖体2处于打开到位位置,则下一次触发的开合盖的动作应是闭合动作;若闭合到位传感器32检测到盖体2处于闭合到位位置,则下一次触发的开合盖的动作应是打开动作;若打开到位传感器31和闭合到位传感器32均未检测到盖体2,则表明盖体2处于半开位置,下一次触发的开合盖的动作设置为打开动作,以便于用户使用。通过在打开到位位置和闭合到位位置均设置传感器,可以实现对盖体2开合的闭环控制,提升用户的使用体验。
31.请参照图2,本技术提供一种开合盖控制方法的另一实施例,其应用于智能垃圾桶。可一并参照图3至图6理解,在该实施例中,所述智能垃圾桶包括基体1、可相对于所述基体1开合的盖体2、用于检测盖体2是否处于打开到位位置的打开到位传感器31,以及用于触发盖体2打开或闭合的开合盖传感器,所述开合盖控制方法包括步骤s1:根据打开到位传感器31检测到的信息判断所述盖体2当前是否处于打开到位位置;若是,则在开合盖传感器检测到触发条件时,控制所述盖体2闭合;若否,则在开合盖传感器检测到触发条件时,控制所述盖体2打开。即,在本实施例中,可以取消闭合到位传感器32,仅通过打开到位传感器31的检测信息判断盖体2不处于打开到位位置时,则设置下一次触发开合盖的动作为开盖动作。因盖体2不处于打开到位位置,则有两种可能,一种是处于闭合到位位置,另一种则是处于打开到位位置与闭合到位位置之间的其他位置,而无论是这两种可能中的哪一种,下一次触发都应该是开盖动作。该实施例可以节省闭合到位传感器32,可以在不影响开合盖控制的前提下,降低成本。
32.当然了,所述智能垃圾桶还可以包括用于检测盖体是否处于闭合到位位置的闭合到位传感器32,所述开合盖控制方法包括步骤s2:根据闭合到位传感器32检测到的信息判断所述盖体当前是否处于闭合到位位置;若是,则在开合盖传感器检测到触发条件时,控制所述盖体打开;若否,则执行步骤s1。
33.在具体实施例中,所述开合盖传感器为红外传感器。所述开合盖传感器检测到的
触发条件,为检测到用户的开关盖动作,如在盖体上方挥手等。当然,开合盖传感器也不以红外传感器为限,还可以是超声波传感器、图像传感器等,开合盖的触发条件也不以此为限,亦可以是手势、距离、速度等满足预定条件为触发条件。
34.请参阅图3至图6所示,本技术提供一种智能垃圾桶,包括基体1和可相对于所述基体1开合的盖体2,所盖体2的开合采用如上所述的开合盖控制方法。具体的,所述打开到位传感器31和所述闭合到位传感器32均为磁感应元件,所述盖体2上设有磁性件22,在盖体开合过程中,所述磁性件22在所述打开到位传感器31和闭合到位传感器32之间运动。所述磁感应元件为霍尔传感器,所述磁性件22为永磁体。所述盖体2设有转动部21,所述转动部21与所述基体1枢转连接,所述磁性件22设于所述转动部21上。所述基体1上设有位于所述转动部21同一侧的并排设置第一支座11和第二支座12,所述磁性件22设于所述转动部21的朝向所述第一支座11和第二支座12的侧壁上,所述打开到位传感器31设于第一支座11上,所述闭合到位传感器32设于第二支座12上。所述开合盖传感器为红外传感器。
35.需要说明的是,在本实施例中,所述智能垃圾桶包括包括小盖、大盖和桶身,大盖为上下贯通的圈状结构,大盖上端构成垃圾投放口。日常投放垃圾时,小盖打开,将垃圾从垃圾投放口投放。大盖是用于在对垃圾袋进行自动打包、自动断袋后打开,以将打包好的垃圾取出。对于这种具有大、小盖的垃圾桶,其实现自动打包和自动断袋的方式可以参照cn106927168a等现有技术进行,本文不再赘述。本实施例中所述的开合盖控制方法中的盖体2为小盖,所述大盖与桶身共同构成所述基体1。当然,本发明所述的开合盖控制方法应用的智能垃圾桶并不以同时具有大盖和小盖的垃圾桶为限,在其他实施例中,所述智能垃圾桶也可以不包括大盖,而仅具有一个可以开合的小盖。
36.通过以上对实施例的具体描述可知,本发明提供的开合盖控制方法,根据打开到位传感器检测到的信息判断所述盖体当前是否处于打开到位位置,若盖体处于打开到位位置,则下一次触发条件为触发盖体闭合;若盖体不处于打开到位位置,则可以判断盖体处于闭合到位位置或是处于半开位置,此时则下一次触发条件为盖体打开,避免了应开盖而被误触发为关闭的问题。
37.以上所述仅是本技术的较佳实施例而已,并非对本技术做任何形式上的限制,虽然本技术已以较佳实施例揭露如上,然而并非用以限定本技术,任何熟悉本专业的技术人员,在不脱离本技术技术方案的范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本技术技术方案的内容,依据本技术的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本技术技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1