一种基于视觉分析的智慧物流仓储系统及物料调度方法与流程
1.本发明涉及智慧物流仓储领域,具体涉及一种基于视觉分析的智慧物流仓储系统及物料调度方法。
背景技术:
2.随着电子信息的快速发展,现有对于仓库存储通过对商品进行分拣,并将商品独有的相关信息编号输送至终端设备,根据相关信息配置相对应的仓库位置,从而以便于后续人工查找。
3.而在此过程中,商品信息编号需要不断更新编号并进行存储,从而在占据有大量的存储空间,同时后续仓库堆垛过程中根据商品编号进行分类排放,在现有的仓库货架上排放位置有限,传统通过堆垛机器人根据预定移动路线位移完成堆垛,对于不同商品大小无法合理安排排放空间,从而在进行排放时,对于小型体积的物品容易在后续排放时稳定性差而导致其掉落并丢失。
技术实现要素:
4.发明目的:提供一种基于视觉分析的智慧物流仓储系统,并进一步提出基于上述仓储系统所实现的物料调度方法,从而有效解决现有技术存在的上述问题。
5.技术方案:第一方面,提出一种基于视觉分析的智慧物流仓储系统,该系统包括存储单元、分料单元以及箱体分析单元。
6.存储单元有多个,以预定间距沿仓库内部均匀阵列固定设置,用于接收箱体并将箱体空间信息转化为数字信号,所述数字信号包括箱体坐标位置,以及所述存储单元空间余量;分料单元沿所述存储单元预定纵横方向直线位移,包括沿所述存储单元纵向平行的龙门机架,沿所述龙门机架中部纵向位移的取料机构,以及固定连接在所述龙门机架底端垂直固定连接的位移座;箱体分析单元沿所述取料机构端部固定连接,以预定距离沿所述箱体拐角延伸测距,与所述存储单元以及分料单元通信连接,包括目视单元以及空间感知单元,用于接收数字信号形成集合体,与自身测得数据比对,判断是否存在空间差值,并发送坐标信号至控制系统。
7.箱体分析单元集合存储单元的相关数据对待放置箱体进行相关数据扫描,至少包括箱体的长、宽、高三个维度的尺寸,与存储单元空间余量进行对比,从而有效判断箱体与存储单元的容值关系,提取最优放置位置坐标数据,并与箱体箱外侧箱体信息相对应存储,合理利用存储单元残余空间,便于后续的位置查找。
8.存储单元根据仓库实际场地尺寸进行有序排放,用于放置箱体,同时对存储单元的整体排放位置建立坐标系,并进行标记,箱体相对于存储单元的层数以及列数确定其位置,同时根据存储单元单层的长、宽、高三个方向的维度建立空间余量元素,多组存储单元
形成集合,并随时根据箱体分析单元传送的数据对存储单元的存储信息实时更新,从而有效提高分料单元的工作效果,以及存储单元的空间合理利用。
9.分料单元与箱体分析单元电性连接并接受控制系统的驱动信号,对箱体进行有序排放,位移座传送箱体并控制其与箱体分析单元的相对位置,推动箱体与箱体分析单元固定的预定位置关系,从而保证箱体分析单元的判断精度,提高空间排放的准确性,取料机构控制箱体的提取以及放置,并通过龙门机架实现沿存储单元的任意方向位移,保证箱体的有效放置。
10.在第一方面进一步的实施例中,所述位移座包括传送机构,沿箱体分析单元对称垂直固定连接在所述传送机构端部的倾斜机构,以及驱动分料单元任意方向位移的万向轮。万向轮控制整体分料单元的运动方向,便于箱体对多方位的存储单元进行有效放置,传送机构固定设置在万向轮中部,传送箱体至末端固定设置的倾斜机构,有效改变箱体的水平位置。传送机构端部一端固定设置有防滑贴,择优采用橡胶材质增大与箱体之间的摩擦阻力,从而防止箱体倾斜重心位移而直接导致箱体沿传送机构反向位移。传送机构与现有技术中的分拣装置进行衔接,便于箱体分析单元的信息提取。箱体通过倾斜机构以预定角度倾斜,从而提高箱体分析单元数据提取效率。
11.在第一方面进一步的实施例中,所述倾斜机构包括与所述传送机构端部以预定角度固定连接的第一伸缩机构,沿所述传送机构预定距离平行固定连接的支架,沿所述支架端部活动连接并轴向延伸至与所述第一伸缩机构水平平齐的调节元件,以及连接所述调节元件及所述第一伸缩机构的支撑块。第一伸缩杆沿预定方向伸缩位移带动调节元件同步转动,第一伸缩机构与调节元件形成不同角度并对支撑块同步工作,带动调节元件水平以及高度方向位移,调节元件通过支架以预定距离远离传送组件,从而直接限定支撑块的位移范围,从而以适应不同大小箱体,通过延伸改变箱体支撑点,使箱体以固定角度倾斜,减少箱体分析单元计算程序,提高箱体分析单元的工作效率,支撑块端部固定设置与所述传送机构同样的防滑贴,对箱体下端两端受力支撑点同时增大摩擦,提高箱体倾斜的稳定性。
12.在第一方面进一步的实施例中,所述调节元件截面呈三角形,其中任一端部边缘与所述支架转动连接,顶部轴向延伸至与所述支撑块一端转动连接,所述第一伸缩机构外侧固定套接有缓冲弹簧。调节元件转动连接支架并与第一伸缩机构形成的不同角度,支架延伸支撑块高度同时对支撑块起到一定支撑作用,箱体承载具有一定重量,在倾斜过程中,其重心高度方向越低,箱体稳定性越高,调节元件周向转动,同时改变支撑块的纵向位移,提高箱体倾斜的稳定性。调节元件对转动时的不稳定分力集中制支撑块下方,并通过第一伸缩机构的缓冲弹簧,对支撑块的振动进行缓冲,从而有效提高支撑块位移稳定性。
13.在第一方面进一步的实施例中,所述箱体分析单元与所述取料机构同步轴向位移,用于限定与所述箱体拐角的相对位置。箱体分析单元固定在分料单元下方,从而便于对箱体尺寸测量以及分料单元对箱体的提取,减少分料单元的纵向位移量,提高分料单元的工作效率,通过龙门机架控制箱体分析单元与箱体之间的相对位置,保证箱体倾斜拐角与测量点之间的固定距离,从而减少测量投影比例误差,影响测量数据的准确性。
14.在第一方面进一步的实施例中,所述取料机构包括沿滑轨直线位移的载物体,所述载物体内部中空固定设置有导向组件,所述导向组件沿所述位移座预定角度位移延伸,用于接收传送倾斜的箱体。载物体与导向元件衔接,用于接收导向元件向其传送的箱体,并
根据控制系统指令完成箱体放置。导向组件沿箱体倾斜角度延伸至传送机构,与箱体形成面接触,通过反向传送至载物体,从而改变箱体的放置角度,便于载物体的承载带动箱体位移。
15.在第一方面进一步的实施例中,所述导向组件包括沿所述载物体内部活动连接并沿轴向预定角度直线运动的推送元件,与所述推送元件中部固定连接的驱动组件,以及沿所述推送元件端部固定连接形成凸起的衔接元件。推送元件位移至与箱体贴合衔接,其位移以预定角度,驱动组件择优采用齿轮齿条传送,便于根据箱体尺寸大小调节推送元件的位移量,提高推送元件的工作效率,同时齿轮中心根据推送元件的位移角度进行调节,形成不规则位移曲线,从而保证推送元件的角度位移。衔接元件通过箱体元件的延伸至与箱体另一端部衔接,保证反向推动箱体位移的有效性。
16.在第一方面进一步的实施例中,所述集合体包括所有位于所述存储单元的箱体坐标集合a(a1,a2,a3...an)以及所述存储单元空间余量集合v(v1,v2,...vn),所述a1表示箱体放置相对于存储单元层数以及列数,所述v1表示储存单元空余三维度方向尺寸,所述a1与所述v1对应于同一存储单元。
17.第二方面,提出一种基于视觉分析的物料调度方法,该方法包括如下步骤:s1、箱体通过传送机构传送,其端部与支撑块相对贴合,第一伸缩机构延伸同时推动调节元件转动,改变支撑块与传送机构的位置关系;s2、龙门机架带动箱体分析单元以预定距离远离箱体,并与箱体边缘相对平行;s3、箱体分析单元对箱体边缘扫描尺寸数据读取,并与存储单元数据对比分析,判断空间差值并确定箱体放置坐标;s4、箱体分析单元复位,驱动组件推动推送元件以预定角度位置,带动衔接元件与箱体外端边缘衔接,驱动组件反向运动,推送元件带动箱体同步运动至载物体;s5、控制系统接受箱体分析单元电信号,驱动龙门机架带动取料机构位于存储单元预定位置。
18.在第二方面进一步的实施例中,存储数据对比分析的过程如下:s301、箱体分析单元视觉分析提取箱体长、宽、高相关数据,组成一个元素;s302、箱体分析单元将元素与存储单元空间余量集合v中元素对比判断,提取集合v中元素及与之对应的箱体坐标集合a中的元素值。
19.有益效果:本发明涉及一种基于视觉分析的智慧物流仓储系统,包括存储单元、分料单元以及箱体分析单元。通过对存储单元存储情况建立双重数字集合,分别为对存储单元的容积坐标以及箱体堆放坐标,并根据分料单元放置情况实时更新数据并发送至箱体分析单元,以便于提高箱体分析单元提取箱体相关数值的效率。通过箱体分析单元对箱体进行尺寸提取并与存储单元发送的集合体进行分析判断,有效提高箱体分析单元数值运算的实时性以及准确性,分料单元接受箱体并使箱体以预定角度产生倾斜拐角,通过可周向以及水平位移的支撑块根据不同箱体大小进行任意调节,从而有效保证箱体的固定倾斜角度,同时箱体分析单元与分料单元下端固定连接根据箱体大小实现同步位移,保证箱体分析单元对箱体等比例投影,有效提高箱体分析单元的检测准确性。
附图说明
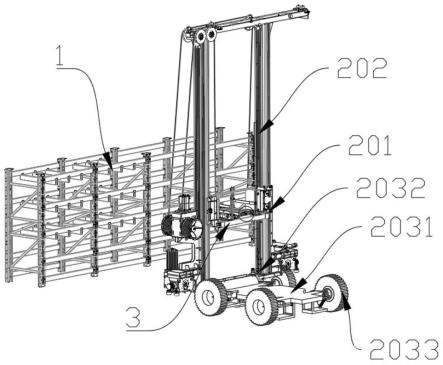
20.图1为本发明整体的结构示意图。
21.图2为本发明中倾斜机构的结构示意图。
22.图3为本发明中取料机构的结构示意图。
23.图4为本发明中物料调度方法的流程示意图。
24.图5本发明中步骤s3的更详细的流程示意图。
25.图中各附图标记为:存储单元1、取料机构201、载物体2011、驱动组件2012、推送元件2013、衔接元件2014、龙门机架202、传送机构2031、倾斜机构2032、万向轮2033、第一伸缩机构2034、支架2035、调节元件2036、支撑块2037、缓冲弹簧2038、箱体分析单元3。
具体实施方式
26.在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
27.如图1至图5示,本发明涉及一种基于视觉分析的智慧物流仓储系统,包括存储单元1、分料单元以及箱体分析单元3,具体方案如下:工厂成品通常经过箱体包装集中放置在仓库中,以便于后续发货,而在进行堆放过程中,采用传统堆垛机器人对相关箱体贴标内容进行扫描存储,从而对箱体进行位置标记,便于查找,而由于工厂生产种类繁多,并根据实际客户需求定制相应大小的箱体,以避免资源浪费,由此直接导致箱体包装大小不一,而仅根据箱体标签内容进行有序分类排放,容易使得仓库的存储空间无法合理安排,造成空间浪费。
28.存储单元1,多个以预定间距沿仓库内部均匀阵列固定设置,用于接收箱体并将箱体空间信息转化为数字信号,所述数字信号包括箱体坐标位置,以及所述存储单元1空间余量;分料单元,沿所述存储单元1预定纵横方向直线位移,包括沿所述存储单元1纵向平行的龙门机架202,沿所述龙门机架202中部纵向位移的取料机构201,以及固定连接在所述龙门机架202底端垂直固定连接的位移座;箱体分析单元3,沿所述取料机构201端部固定连接,以预定距离沿所述箱体拐角延伸测距,与所述存储单元1以及分料单元通信连接,包括目视单元以及空间感知单元,用于接收数字信号形成集合体,与自身测得数据比对,判断是否存在空间差值,并发送坐标信号至控制系统。
29.箱体分析单元3集合存储单元1的相关数据对待放置箱体进行相关数据扫描,至少包括箱体的长、宽、高三个维度的尺寸,与存储单元1空间余量进行对比,从而有效判断箱体与存储单元1的容值关系,提取最优放置位置坐标数据,并与箱体箱外侧箱体信息相对应存储,合理利用存储单元1残余空间,便于后续的位置查找。
30.存储单元1根据仓库实际场地尺寸进行有序排放,用于放置箱体,同时对存储单元1的整体排放位置建立坐标系,并进行标记,箱体相对于存储单元1的层数以及列数确定其位置,同时根据存储单元1单层的长、宽、高三个方向的维度建立空间余量元素,多组存储单
元1形成集合,并随时根据箱体分析单元3传送的数据对存储单元1的存储信息实时更新,从而有效提高分料单元的工作效果,以及存储单元1的空间合理利用。
31.分料单元与箱体分析单元3电性连接并接受控制系统的驱动信号,对箱体进行有序排放,位移座传送箱体并控制其与箱体分析单元3的相对位置,推动箱体与箱体分析单元3固定的预定位置关系,从而保证箱体分析单元3的判断精度,提高空间排放的准确性,取料机构201控制箱体的提取以及放置,并通过龙门机架202实现沿存储单元1的任意方向位移,保证箱体的有效放置。
32.箱体分析单元3提取箱体的相关尺寸,在传送箱体至与箱体分析单元3相对位置时,垂直平面无法一次获取箱体尺寸,需要对其进行垂直翻转,由此导致箱体内部的产品晃动而影响产品表面质量,所述位移座包括传送机构2031,沿箱体分析单元3对称垂直固定连接在所述传送机构2031端部的倾斜机构2032,以及驱动分料单元任意方向位移的万向轮2033。万向轮2033控制整体分料单元的运动方向,便于箱体对多方位的存储单元1进行有效放置,传送机构2031固定设置在万向轮2033中部,传送箱体至末端固定设置的倾斜机构2032,有效改变箱体的水平位置。传送机构2031端部一端固定设置有防滑贴,择优采用橡胶材质增大与箱体之间的摩擦阻力,从而防止箱体倾斜重心位移而直接导致箱体沿传送机构2031反向位移。传送机构2031与现有技术中的分拣装置进行衔接,便于箱体分析单元3的信息提取。箱体通过倾斜机构2032以预定角度倾斜,箱体分析单元3对准箱体物位置并根据角度投影关系进行数值转换,实现对箱体实际尺寸的准确统计,减少箱体翻转频率,从而提高篇箱体分析单元3数据提取效率。
33.针对现有工厂产品的存储放置,箱体外部箱体尺寸根据产品实际大小尺寸定制,由此箱体的整体重量与箱体本身体积呈正比,其比值人工计算存在上下较小幅度差异,可忽略不计,从而箱体在进行堆放过程需要不断计算,箱体在倾斜过程中容易直接导致内部产品位移撞击,影响产品质量,所述倾斜机构2032包括与所述传送机构2031端部以预定角度固定连接的第一伸缩机构2034,沿所述传送机构2031预定距离平行固定连接的支架2035,沿所述支架2035端部活动连接并轴向延伸至与所述第一伸缩机构2034水平平齐的调节元件2036,以及连接所述调节元件2036及所述第一伸缩机构2034的支撑块2037。第一伸缩杆沿预定方向伸缩位移带动调节元件2036同步转动,第一伸缩机构2034与调节元件2036形成不同角度并对支撑块2037同步工作,带动调节元件2036水平以及高度方向位移,调节元件2036通过支架2035以预定距离远离传送组件,从而直接限定支撑块2037的位移范围,以适应不同大小箱体,通过延伸改变箱体支撑点,使箱体以固定角度倾斜,所述箱体与传送机构2031形成的预定角度为以传送机构2031为基准线,箱体端部与基准线形成的角度,根据实际生产箱体尺寸限定倾斜角度,箱体重量与倾斜角度呈反比,从而降低其重心,保证倾斜放置的稳定性。减少箱体分析单元3计算程序,提高箱体分析单元3的工作效率,支撑块2037端部固定设置与所述传送机构2031同样的防滑贴,对箱体下端两端受力支撑点同时增大摩擦,提高箱体倾斜的稳定性。调节元件2036的工作性质直接决定支撑块2037的位移方向,从而进一步影响箱体的倾斜效果。所述调节元件2036截面呈三角形,其中任一端部边缘与所述支架2035转动连接,顶部轴向延伸至与所述支撑块2037一端转动连接,所述第一伸缩机构2034外侧固定套接有缓冲弹簧2038。调节元件2036转动连接支架2035并与第一伸缩机构2034形成的不同角度,支架2035延伸支撑块2037高度同时对支撑块2037起到一定支撑
作用,箱体承载具有一定重量,在倾斜过程中,其重心高度方向越低,箱体稳定性越高,调节元件2036周向转动,同时改变支撑块2037的纵向位移,提高箱体倾斜的稳定性。调节元件2036对转动时的不稳定分力集中制支撑块2037下方,并通过第一伸缩机构2034的缓冲弹簧2038,对支撑块2037的振动进行缓冲,从而有效提高支撑块2037位移稳定性。
34.箱体分析单元3与箱体之间的间距直接影响对箱体的尺寸测量,所述箱体分析单元3与所述取料机构201同步轴向位移,用于限定与所述箱体拐角的相对位置。箱体分析单元3固定在分料单元下方,从而便于对箱体尺寸测量以及分料单元对箱体的提取,减少分料单元的纵向位移量,提高分料单元的工作效率,通过龙门机架202控制箱体分析单元3与箱体之间的相对位置,保证箱体倾斜拐角与测量点之间的固定距离,从而减少测量投影比例误差,影响测量数据的准确性。
35.所述取料机构201包括沿滑轨直线位移的载物体2011,所述载物体2011内部中空固定设置有导向组件,所述导向组件沿所述位移座预定角度位移延伸,用于接收传送倾斜的箱体。载物体2011与导向元件衔接,用于接收导向元件向其传送的箱体,并根据控制系统指令完成箱体放置。导向组件沿箱体倾斜角度延伸至传送机构2031,与箱体形成面接触,通过反向传送至载物体2011,从而改变箱体的放置角度,便于载物体2011的承载带动箱体位移。
36.所述导向组件包括沿所述载物体2011内部活动连接并沿轴向预定角度直线运动的推送元件2013,与所述推送元件2013中部固定连接的驱动组件2012,以及沿所述推送元件2013端部固定连接形成凸起的衔接元件2014。推送元件2013位移至与箱体贴合衔接,其位移以预定角度,驱动组件2012择优采用齿轮齿条传送,便于根据箱体尺寸大小调节推送元件2013的位移量,提高推送元件2013的工作效率,同时齿轮中心根据推送元件2013的位移角度进行调节,形成不规则位移曲线,从而保证推送元件2013的角度位移。衔接元件2014通过箱体元件的延伸至与箱体另一端部衔接,保证反向推动箱体位移的有效性。
37.所述集合体包括所有位于所述存储单元1的箱体坐标集合a(a1,a2,a3...an)以及所述存储单元1空间余量集合v(v1,v2,...vn),所述a1表示箱体放置相对于存储单元1层数以及列数,所述v1表示储存单元空余三维度方向尺寸,所述a1与所述v1对应于同一存储单元1,便于箱体分析单元3提取存储单元1位置。
38.基于上述描述的一种基于视觉分析的智慧物流仓储系统,本发明提供一种调度方法,具体工作方式如下:传送机构2031衔接箱体,并推动箱体移动至预定距离其底平面与支撑块2037相对贴合,根据箱体尺寸第一伸缩机构2034延伸同时推动调节元件2036转动,根据现有技术中的支撑力分析计算,改变支撑块2037与传送机构2031的高度以及距离,使得箱体与传送机构2031形成预定角度,箱体拐角与箱体分析单元3垂直对齐;龙门机架202带动箱体分析单元3以预定距离调节与箱体的相对位置,形成固定距离,达到所述箱体投影等比例缩放;箱体分析单元3对箱体边缘扫描尺寸数据读取,并与存储单元1数据对比分析,判断空间差值并确定箱体放置坐标;箱体分析单元3视觉分析提取箱体长a11、宽a12、高a13相关数据,组成一个元素;箱体分析单元3将元素与存储单元1空间余量集合v中元素对比判断,通过数值差值正负判断,或者数值大小对比判断,箱体分析单元3所测数值全部小于存
储单元1空间则判定位存储空间可行,并由储单元空间余量v中选择最优存储位置元素,提取集合v中元素中与之对应的箱体坐标集合a中的元素为箱体存储坐标,并发送结果坐标至控制系统。
39.其中,所述箱体分析单元3采用工业照相机对箱体扫描计算相关数据,包括目视单元以及空间感知单元,并规划箱体放置最优路线,工业照相机相对于箱体倾斜拐角设置有预定距离,具体步骤如下:s3011、根据工业照相机相关参数,箱体投影平面与其实体比例值为k;s3012、相机扫描拍摄,在进行灰度处理后,并利用cvfindcontours函数对图像进行轮廓跟踪,具体的将轮廓中的所有点的编码转换成点,提取边缘特征性,压缩水平、垂直和对角直线段,仅保留它们的端点,通过程序代码计算连接形成对应的尺寸值,即箱体长a11、宽a12、高a13,并组成为箱体轮廓实际尺寸集合ai(a11*k,a12*k,a13*k);s3013、将存储单元1空间余量建立坐标系,存储单元1长记作x、宽记作y、高记作z,建立并提取存储单元1空间余量集合v(v1,v2,...vn),其中,v1包括箱体坐标集合a中对应空间尺寸值,并基于存储单元1坐标系,记作集合v1为(x1,y1,z1);s3014、集合ai与分别于单元空间余量集合v中各元素对应,并对比判断,差值记作集合v
′
(v1
′
,v2
′
,...vn
′
),其中,v1
′
= {(a11*k
‑ꢀ
x1),(a12*k
‑ꢀ
y1),(a13*k
‑ꢀ
z1)},以此类推形成集合v
′
,此时集合v
′
各元素与箱体坐标集合a(a1,a2,a3...an)相对应,提取集合v
′
中差值小于等于0的元素记作v "以及与差值对应的箱体坐标an
ꢀ′
,该箱体坐标为最终箱体存储坐标;s3015、v
′
中差值大于0的元素保留至原集合中;s3016、存储坐标发送至控制系统驱动取料机构201位移至预定坐标。
40.箱体分析单元3复位,齿轮转动推动推送元件2013以预定角度直线位移,由箱体倾斜空间穿梭至箱体另一端,同时带动衔接元件2014与箱体外端边缘衔接,驱动组件2012反向运动,推送元件2013带动箱体同步运动至载物体2011;控制系统接受箱体分析单元3电信号,驱动龙门机架202带动取料机构201位于存储单元1预定位置。存储单元1更新对应的存储单元1的元素数值,并实时发送至箱体分析单元3。
41.此外箱体分析单元3接受取料机构201的坐标,在进行更新过程中,根据取料机构201放置结果进行数据核对,物料在放置完毕后,若其稳定性较差,对结果坐标进行修正重新提取箱体坐标,同时系统建立新的数据集合m(m1,m2
…
mn),其中m1=(ai,v "),ai 对应错误箱体存储坐标,v "对应错误存储单元1空间余量,n为时间周期,在进行步骤s3014箱体存储坐标选定时,增加判断基准,提高数值的准确性。
42.尽管参照特定的优选实施例已经表示和表述了本发明,但其不得解释为对本发明自身的限制。在不脱离所附权利要求定义的本发明的精神和范围前提下,可对其在形式上和细节上做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1