多联药房机器人药品输送方法、装置与流程
1.本技术属于医疗机器人领域,具体涉及一种多联药房机器人药品输送方法、装置。
背景技术:
2.现有技术的药房机器人(202010679136.5)执行药品补货、发货、盘货功能,实现药房即医师服务、药房即药师服务和药房即药事服务,多个药房机器人装置单体采用并联或串联方式联结,增加储存药品种类和数量,用于替代大型医院门诊药房、大型药店。
3.药房机器人装置单体并联或串并联时,可以设置多个取药窗口,并行服务多个顾客。单个药房机器人装置容纳的药品种类和数量受限制,同时,补货时,同类型药品通常会集中于同一个药房机器人装置,因此,顾客需要的药品可能会分散于不同的药房机器人单体。
4.现有技术的并联或串并联药房机器人,在并行服务多个顾客时,药房机器人装置单体之间药品不能互通,导致顾客在不同取药窗口往返。另外,药房机器人传送带位置偏低,导致顾客不得不弯腰取药。
5.鉴于此,我们设计一种多联药房机器人药品输送的装置和方法,实现多个药房机器人单体药品汇集,解决药房机器人之间药品互通汇集问题,提升药品到合适高度的服务窗口,解决弯腰取药问题,从而提升服务效率,改善用户体验。
技术实现要素:
6.本技术的目的在于提供一种多联药房机器人药品输送的装置和方法,解决药房机器人之间药品互通汇集和弯腰取药问题。
7.本技术是通过如下技术方案实现的:一方面,本技术的一个实施例提供了一种多联药房机器人输送药品方法,用于多个药房机器人间药品汇集以及转移药品到多个顾客取药窗口,所述方法包括如下步骤。
8.步骤1,确定顾客取药优先级排序,系统依据顾客申请取药时间先后安排顾客取药顺序,如同一时间点多个顾客申请取药,则系统计算顾客取药所需时间,按照顾客取药所需时间从小到大安排顾客取药顺序的优先级。
9.步骤2,药房机器人接收系统发药指令,排序优先顾客所购买药品从多个药房机器人经横跨多个药房机器人的输送装置转移并汇集到排序优先顾客所对应的取药窗口。
10.步骤3,排序优先顾客拿到所购买药品。
11.优选地,本技术的一个实施例的步骤1中,所述系统包括药房机器人、物联网联结的其他医疗机器人、远程智能医疗系统、移动智能终端、云服务器、软件代码、算法。
12.优选地,本技术的一个实施例的步骤1中所述顾客取药所需时间至少包括顾客所购买的全部药品由不同的药房机器人的对应药箱经传送带运送到输送装置,由输送装置将顾客所购买全部药品转移到顾客取药窗口对应的汇集仓,并由汇集仓转移到取药窗口的药品输送全程所需要时间。
13.优选地,本技术的一个实施例的所述药品输送全程所需要时间由顾客所购买药品的输送距离、输送装置运行速度精确计算获得。
14.优选地,本技术的一个实施例的所述输送装置包括履带装置、滑道装置、升降装置中至少一个。
15.优选地,本技术的一个实施例的步骤2中,顾客所购买药品从药房机器人接收系统发药指令到全部药品转入顾客所对应的取药窗口的全过程为智能化自动完成。
16.优选地,本技术的一个实施例的步骤2中,如果顾客选择由第三方物流或跑腿机器人代取药品,顾客所购买药品由汇集仓输送到多联药房机器人附属结构,顾客所购买药品在所述附属结构内自动装箱打包并打印顾客联系方式,第三方物流或跑腿机器人所述该附属结构内取货,送往顾客约定地点。
17.优选地,本技术的一个实施例还包括步骤4,排序次级优先顾客所购买药品从多个药房机器人经横跨多个药房机器人的输送装置转移并汇集到顾客所对应的取药窗口。
18.优选地,本技术的一个实施例还包括步骤5,排序次级优先顾客拿到所购买药品。
19.另外一方面,本技术的一个实施例提供了一种多联药房机器人输送药品装置,用于多个药房机器人单体间药品汇集以及提升药品到合适高度,其包括输送装置,所述输送装置包括履带装置、滑道装置、升降装置中至少一个,横跨连接多个并联的药房机器人,用于接收药房机器人传送来的顾客所购买药品,并将顾客所购买药品转运到顾客对应的汇集仓或取药窗口。
20.优选地,本技术的一个实施例的所述履带装置包括履带设备、推送设备,所述履带设备用于承接药房机器人传送带运到的顾客所购买药品,所述推送设备用于把顾客所购买药品从所述履带设备转移到顾客所对应的汇集仓或取药窗口。
21.优选地,本技术的一个实施例的所述滑道装置包括近端滑道,用于连通药房机器人的传送带;远端滑道,用于连通所述汇集仓;中枢滑道,为所述近端滑道与所述远端滑道的交汇区域;道岔装置,所述道岔装置包括机械臂、末端执行器,所述末端执行器包括道岔,所述道岔包括支架、引导槽,用于借助所述机械臂把所述道岔准确置入所述中枢滑道,使得所述近端滑道和所述远端滑道贯通,药房机器人传送带运到的药品经所述近端滑道、所述中枢滑道、所述引导槽、所述远端滑道转移到汇集仓。
22.优选地,本技术的一个实施例的所述升降装置用于所述履带装置、所述汇集仓的升高或降低,所述升降装置采用丝杠升降装置、绳索升降装置或液压升降装置中的至少一种。
23.优选地,所述履带装置包括主动轮、从动轮、履带、滚轮、滚子、支架、驱动电机、光电传感器、控制器,用于承接药房机器人传送带运到的药品。
24.优选地,所述推送装置包括压缩机、控制器、气缸、传动轴、推板,用于把药品传递到所述汇集仓。
25.优选地,所述滑道包括支架、滚轮、滚子。
26.本发明的有益效果。
27.(1)解决了多个并联或串并联药房机器人单体之间药品互通汇集问题。
28.采用履带承载装置、滑道装置构建的运送装置,横跨连接多个并联或串并联的药房机器人,把用户需要的药品从各个药房机器人单体装置运送并汇集,尤其借助算法,减少
用户总体等待时间,使得用户在任何一个取药窗口均可获取到所购买的全部药品。
29.(2)解决了药房机器人弯腰取药问题。
30.采用丝杠升降装置、滑轮绳索升降装置、液压升降装置构建的升降装置联结履带承载装置、无人车装置、汇集仓,丝杠升降装置、滑轮绳索升降装置或液压升降装置带动承载装置、汇集仓精准升降,把承载药品的履带承载装置、汇集仓升高到取药窗口,使得用户站立位或坐位,即可拿到全部所购买的药品。
附图说明
31.为了更清楚地说明本技术实施例的技术方案,下面将对实施例描述中所需要使用的附图作简要地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域的技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他附图。
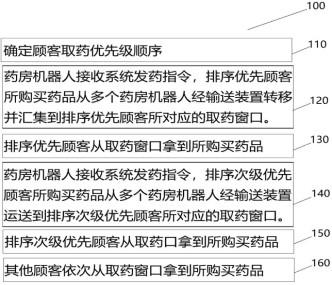
32.图1是本技术一个实施例的多联药房机器人间药品输送转移流程图。
33.图2是本技术一个实施例的并联药房机器人履带承载输送结构示意图。
34.图3是本技术一个实施例的串并联药房机器人履带承载输送结构示意图。
35.图4是本技术一个实施例的并联药房机器人滑道输送结构示意图。
36.图5a是本技术一个实施例的并联药房机器人中间滑道贯通结构示意图。
37.图5b是本技术一个实施例的并联药房机器人左侧滑道贯通结构示意图。
38.图5c是本技术一个实施例的并联药房机器人右侧滑道贯通结构示意图。
39.图6是本技术一个实施例的并联药房机器人履带装置滑轮绳索升降结构示意图。
40.图7a是本技术一个实施例的并联药房机器人履带装置丝杆轴向运动丝杠升降结构示意图。
41.图7b是本技术一个实施例的并联药房机器人履带装置螺母轴向运动丝杠升降结构示意图。
42.图8是本技术一个实施例的并联药房机器人履带装置液压剪叉升降平台升降结构示意图。
43.图9是本技术一个实施例的并联药房机器人汇集仓螺母轴向运动丝杠升降结构示意图。
具体实施方式
44.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本技术的一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本技术及其应用或使用的任何限制。基于本技术中的实施例,本领域普通技术人员在没有创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
45.需要说明的是,本实施例的方位语,仅是互为相对概念或是以产品正常使用状态为参考的,而不应该认为是具有限制性的。
46.参见图1,本技术的一个实施例提供了相互联结的多个药房机器人间药品实现输送汇集并转移到多个顾客取药窗口的方法。
47.如图1所示,本技术的一个实施例的多联药房机器人间药品输送汇集以及转移到
多个顾客取药窗口的方法流程100可以包括如下步骤。
48.110,确定顾客取药优先级排序,具体可以包括:依据顾客申请取药时间先后,可以由系统安排顾客取药顺序,如同一时间点多个顾客申请取药,则可以由系统计算顾客取药所需时间,系统可以按照顾客取药所需时间从少到多安排顾客取药顺序的优先级。
49.需要说明的是,步骤110中的顾客可以是患者或健康的药品最终用户,也可以是第三人,第三人可以是患者或健康的药品最终用户的家人、朋友,也可以是患者或健康的药品最终用户委托的物流快递人员或智能跑腿机器人。
50.需要说明的是,步骤110中的申请取药时间可以由系统获知顾客取药请求时间点确认,顾客取药请求的方式包括但不限于向系统提交纸质版或电子版处方药处方、非处方药需求信息、医疗器械或医疗耗材需求信息、保健品或其他健康载体,可以是现场提交请求,也可以远程提交请求。
51.另外,系统在计算步骤110中的顾客取药所需时间时,顾客取药所需时间至少可以包括顾客所购买的全部药品由不同的药房机器人的对应药箱经传送带运送到输送装置,由输送装置将顾客所购买全部药品转移到顾客取药窗口对应的汇集仓,并由汇集仓转移到取药窗口的全程药品输送所需要时间。当然,全程药品输送所需要时间可以由系统依据顾客所购买药品的输送距离、输送装置运行速度精确计算获得。
52.120,药房机器人接收系统发药指令,排序优先顾客所购买药品从多个药房机器人经横跨多个药房机器人的输送装置转移并汇集到排序优先顾客所对应的取药窗口。
53.需要说明的是,步骤120中的药房机器人可以是药房机器人单体,也可以是多联药房机器人,其接收的发药指令由系统发出。
54.需要说明的是,步骤120中的排序优先顾客是在步骤110中由系统确认的最先提交取药申请的顾客,或由系统确认的全程药品输送所需时间最少的顾客。
55.可以理解的是,顾客所购买的药品从药房机器人接收发药指令到全部药品转入顾客所对应的取药窗口的全过程是智能化自动完成的。
56.另外,如果顾客选择由第三方物流或跑腿机器人代取药品,步骤120中顾客所购买的药品可以由汇集仓输送到多联药房机器人的附属结构,在该附属结构内,顾客所购买的药品自动装箱打包并打印顾客的联系方式,第三方物流或跑腿机器人可以从该附属结构取货,送往顾客约定的地点。
57.130,排序优先顾客从所对应的取药窗口拿到所购买药品。
58.如果顾客选择由第三方物流或跑腿机器人代取药品,第三方物流或跑腿机器人可以从附属结构取货,及时送往顾客约定的地点。
59.140,排序次级优先顾客所购买药品从多个药房机器人经横跨多个药房机器人的输送装置转移并汇集到顾客所对应的取药窗口。
60.150,排序次级优先顾客从所对应的取药窗口拿到所购买药品。
61.160,其他顾客依次从所对应的取药窗口拿到所购买药品。
62.如图2-图9所示,本技术实施例以五个药房机器人单体装置并联或串并联、设置三个取药窗口为例,进行说明一种多联药房机器人药品输送的方法、装置,实际应用中,可以设置任意数量的药房机器人单体装置并联或串并联,设置任意数量的取药窗口。
63.参见图2,本技术的一个实施例的一种多联药房机器人输送药品的装置可以包括
第一药房机器人10-1、第二药房机器人10-2、第三药房机器人10-3、第四药房机器人10-4、第五药房机器人10-5、履带承载装置20、第一汇集仓30-1、第二汇集仓30-2、第三汇集仓30-3,第一药房机器人10-1、第二药房机器人10-2、第三药房机器人10-3、第四药房机器人10-4、第五药房机器人10-5的药品经第一传送带10-1-1、第二传送带10-2-1、第三传送带10-3-1、第四传送带10-4-1、第五传送带10-5-1传递到履带承载装置20,按照系统指令,智能化的履带承载装置20往复运行,可以把药品运送到第一汇集仓30-1、或第二汇集仓30-2、或第三汇集仓30-3对应区域,配置的视觉传感器识别药品,智能化的推送装置可以把药品推送入第一汇集仓30-1、或第二汇集仓30-2、或第三汇集仓30-3。
64.如图3所示,本技术的一个实施例的一种多联药房机器人输送药品的装置可以包括并联的第一药房机器人10-1、第二药房机器人10-2、第三药房机器人10-3、第四药房机器人10-4、第五药房机器人10-5、以及串并联的第六药房机器人40-1、第七药房机器人40-2、第八药房机器人40-3、第九药房机器人40-4、第十药房机器人40-5、履带承载装置20、第一汇集仓30-1、第二汇集仓30-2、第三汇集仓30-3,第一药房机器人10-1、第二药房机器人10-2、第三药房机器人10-3、第四药房机器人10-4、第五药房机器人10-5的传送带分别与第六药房机器人40-1、第七药房机器人40-2、第八药房机器人40-3、第九药房机器人40-4、第十药房机器人40-5的传送带连通,可以实现第六药房机器人40-1、第七药房机器人40-2、第八药房机器人40-3、第九药房机器人40-4、第十药房机器人40-5的药品分别经第一药房机器人10-1、第二药房机器人10-2、第三药房机器人10-3、第四药房机器人10-4、第五药房机器人10-5的传送带运送到履带承载装置20,并系统按照指令,经智能化的推送装置可以把药品推送入第一汇集仓30-1、或第二汇集仓30-2、或第三汇集仓30-3。
65.参见图4,本技术的一个实施例的一种多联药房机器人输送药品的装置可以包括第一药房机器人10-1、第二药房机器人10-2、第三药房机器人10-3、第四药房机器人10-4、第五药房机器人10-5、第一近端滑道80-1、第二近端滑道80-2、第三近端滑道80-3、第四近端滑道80-4、第五近端滑道80-5、中枢滑道90、第一远端滑道100-1、第二远端滑道100-2、第三远端滑道100-3、第一汇集仓30-1、第二汇集仓30-2、第三汇集仓30-3。
66.如图5a所示,本技术的一个实施例的一种多联药房机器人输送药品的装置可以按照系统指令,机械臂(未示出)可以把道岔110置入中枢滑道90,第一道岔110-1、第二道岔110-2分别阻断第一远端滑道100-1、第三远端滑道100-3,使得第一近端滑道80-1、第二近端滑道80-2、第三近端滑道80-3、第四近端滑道80-4、第五近端滑道80-5经中枢滑道90、第二远端滑道100-2与第二汇集仓30-2贯通,第一药房机器人10-1、第二药房机器人10-2、第三药房机器人10-3、第四药房机器人10-4、第五药房机器人10-5的药品可以进入第二汇集仓30-2。
67.如图5b所示,本技术的一个实施例的一种多联药房机器人输送药品的装置可以按照系统指令,机械臂(未示出)可以把道岔110置入中枢滑道90,第一道岔110-1阻断第二远端滑道100-2和第三远端滑道100-3,使得第一近端滑道80-1、第二近端滑道80-2、第三近端滑道80-3、第四近端滑道80-4、第五近端滑道80-5经中枢滑道90、第一远端滑道100-1与第一汇集仓30-1贯通,第一药房机器人10-1、第二药房机器人10-2、第三药房机器人10-3、第四药房机器人10-4、第五药房机器人10-5的药品可以进入第一汇集仓30-1。
68.如图5c所示,本技术的一个实施例的一种多联药房机器人输送药品的装置可以按
照系统指令,机械臂(未示出)可以把道岔110置入中枢滑道90,第一道岔110-1阻断第一远端滑道100-1和第二远端滑道100-2,使得第一近端滑道80-1、第二近端滑道80-2、第三近端滑道80-3、第四近端滑道80-4、第五近端滑道80-5经中枢滑道90、第三远端滑道100-3与第三汇集仓30-3贯通,第一药房机器人10-1、第二药房机器人10-2、第三药房机器人10-3、第四药房机器人10-4、第五药房机器人10-5的药品可以进入第三汇集仓30-3。
69.参见图6,本技术的一个实施例的一种多联药房机器人输送药品的装置可以包括履带承载装置20、第一智能电机120-1、第一滑轮130-1、第一绳索140-1、第二智能电机120-2、第二滑轮130-2、第二绳索140-2,第一绳索140-1、第二绳索140-2的一端分别缠绕第一智能电机120-1、第二智能电机120-2的转轴,第一绳索140-1、第二绳索140-2的另外一端分别固定于履带承载装置20的两端。按照系统指令,第一智能电机120-1、第二智能电机120-2同步运行,通过缠绕或释放第一绳索140-1、第二绳索140-2,使得履带承载装置20准确升高或降低。
70.当然,本技术的一个实施例的一种多联药房机器人输送药品的第一智能电机120-1、第一滑轮130-1、第一绳索140-1、第二智能电机120-2、第二滑轮130-2、第二绳索140-2组成的滑轮升降装置,还可以与第一汇集仓30-1、第二汇集仓30-2、第三汇集仓30-3连接,使得第一汇集仓30-1、第二汇集仓30-2、第三汇集仓30-3升高或降低。
71.参见图7a,本技术的一个实施例的一种多联药房机器人输送药品的装置可以包括履带承载装置20、第一立杆160-1、第一智能电机螺母复合体150-1、固定架170、第二立杆160-2、第二智能电机螺母复合体150-2,第一智能电机螺母复合体150-1、第二智能电机螺母复合体150-2分别连接固定架170,第一立杆160-1、第二立杆160-2的一端分别固定于履带承载装置20的两端,第一立杆160-1、第二立杆160-2的另外一端游离。按照指令,第一智能电机螺母复合体150-1、第二智能电机螺母复合体150-2同步运行,通过第一立杆160-1和第二立杆160-2带动履带承载装置20升高或降低。
72.当然,如图7a所示的本技术的一个实施例的一种多联药房机器人输送药品的第一立杆160-1、第一智能电机螺母复合体150-1、固定架170、第二立杆160-2、第二智能电机螺母复合体150-2组成的丝杆轴向运动丝杠升降装置,还可以与第一汇集仓30-1、第二汇集仓30-2、第三汇集仓30-3连接,使得第一汇集仓30-1、第二汇集仓30-2、第三汇集仓30-3升高或降低。
73.参见图7b,本技术的一个实施例的一种多联药房机器人输送药品的装置可以包括履带承载装置20、第一立杆160-1、第一智能电机螺母复合体150-1、固定架170、第二立杆160-2、第二智能电机螺母复合体150-2,第一智能电机螺母复合体150-1、第二智能电机螺母复合体150-2分别固定于履带承载装置20的两端,第一立杆160-1、第二立杆160-2的一端分别固定于固定架170,第一立杆160-1、第二立杆160-2的另外一端游离。按照指令,第一智能电机螺母复合体150-1、第二智能电机螺母复合体150-2同步运行,通过第一智能电机螺母复合体150-1、第二智能电机螺母复合体150-2带动履带承载装置20升高或降低。
74.当然,如图7b所示的本技术的一个实施例的一种多联药房机器人输送药品的第一立杆160-1、第一智能电机螺母复合体150-1、固定架170、第二立杆160-2、第二智能电机螺母复合体150-2组成的螺母轴向运动丝杠升降装置,还可以与第一汇集仓30-1、第二汇集仓30-2、第三汇集仓30-3连接,使得第一汇集仓30-1、第二汇集仓30-2、第三汇集仓30-3升高
或降低。
75.参见图8,本技术的一个实施例的一种多联药房机器人输送药品的装置可以包括履带承载装置20、液压剪叉升降平台装置180、固定架170、第一固定座190-1、第二固定座190-2,液压剪叉升降平台装置180下端连接固定架170,上端分别经第一固定座190-1和第二固定座190-2连接履带承载装置20,智能化的液压剪叉升降平台装置180可以带动履带承载装置20精准升高或降低。
76.当然,如图8所示的本技术的一个实施例的一种多联药房机器人输送药品的液压剪叉升降平台装置180、固定架170、第一固定座190-1、第二固定座190-2组成的液压剪叉升降平台系统还可以与第一汇集仓30-1、第二汇集仓30-2、第三汇集仓30-3连接,使得第一汇集仓30-1、第二汇集仓30-2、第三汇集仓30-3升高或降低。
77.另外,如图8所示的本技术的一个实施例的一种多联药房机器人输送药品的液压剪叉升降平台还可由单桅式液压升降平台或双桅式液压升降平台替代,用于履带承载装置20、第一汇集仓30-1、第二汇集仓30-2、第三汇集仓30-3升高或降低。
78.参见图9,本技术的一个实施例的一种多联药房机器人输送药品的装置可以包括汇集仓30、第一立杆160-1、第一智能电机螺母复合体150-1、固定架170、第二立杆160-2、第二智能电机螺母复合体150-2,第一智能电机螺母复合体150-1、第二智能电机螺母复合体150-2固定于汇集仓30,第一立杆160-1、第二立杆160-2的一端分别固定于固定架170,第一立杆160-1、第二立杆160-2的另外一端游离。按照系统指令,第一智能电机螺母复合体150-1、第二智能电机螺母复合体150-2可以同步运行,带动汇集仓30升高或降低。
79.本技术的一个实施例的一种多联药房机器人输送药品的方法可以包括运送装置升降方法、汇集仓升降方法,用于提升药品到合适高度,解决用户弯腰取药问题。
80.本技术的一个实施例的运送装置升降方法可以包括丝杠装置升降方法、绳索装置升降方法、液压装置升降方法,用于降低运送装置到药房机器人传送带的高度,承接传送带传递的药品,升高运送装置到汇集仓的高度,协助药品输送到汇集仓,供用户取药。
81.本技术的一个实施例的丝杠装置升降方法可以包括运送装置结合丝杠升降装置的丝杆轴向运动方法和运送装置结合丝杠升降装置的螺母轴向运动方法。其中,运送装置结合丝杠升降装置的丝杆轴向运动方法包括:丝杆一端固定于运送装置,另一端游离,螺母、智能电机、控制器经联结件固定于药房机器人本体的支撑部位,当智能电机启动,螺母带动丝杆往复运行,实现所述运送装置升降。其中,运送装置结合丝杠升降装置的螺母轴向运动方法包括:丝杆一端固定于药房机器人本体的支撑部位,另一端游离,螺母、智能电机、控制器经联结件固定于运送装置,当智能电机启动,螺母带动运送装置往复运动,实现运送装置升降。
82.本技术的一个实施例的绳索装置升降方法可以包括运送装置结合滑轮绳索装置升降方法、运送装置结合轮轴绳索装置升降方法。其中,运送装置结合滑轮绳索装置升降方法包括:从动轮连接运送装置,主动轮连接智能电机,绳索一端固定于药房机器人本体的支撑部位,经从动轮连接主动轮,智能电机正向转动,主动轮缠绕绳索,带动从动轮上升,使得所述运送装置升高,智能电机反向转动,主动轮释放绳索,带动从动轮下降,使得所述运送装置降低。其中,运送装置结合轮轴绳索装置升降方法包括:两组轮轴绳索装置分别固定于药房机器人本体的支撑部位,分别对应于运送装置的两端,绳索一端连接主动轮,另外一端
连接运送装置,两组轮轴绳索装置的智能电机同步运行,主动轮缠绕或释放绳索,带动运送装置上升或下降。
83.本技术的一个实施例的液压装置升降方法可以包括运送装置结合液压剪叉升降平台升降方法、运送装置结合单桅式液压升降平台升降方法、运送装置结合双桅式液压升降平台升降方法。其中,液压升降平台基座设置于药房机器人本体底部,上部承接运送装置,智能叶片泵启动,液压升降平台升降带动运送装置升降。
84.本技术的一个实施例的汇集仓升降方法可以用于降低汇集仓到药房机器人传送带的高度或运送装置的高度,汇集药品后,升高汇集仓到方便用户取药的高度,包括:丝杠装置升降方法、绳索装置升降方法、液压装置升降方法。
85.本技术的一个实施例的多联药房机器人药品互通汇集的履带方法可以包括单用户服务方法、多用户并行服务方法。
86.本技术的一个实施例的履带方法单用户服务可以包括:(1)药房机器人药箱药品经传送带到达履带装置,履带装置启动,按照算法,往复运行,药品到达对应用户的汇集仓,经推送装置推送全部药品到对应用户的汇集仓,汇集仓升高到用户取药窗口高度;(2)药房机器人药箱药品经传送带到达履带装置,全部药品聚集到履带装置的一端,履带装置再运行到对应用户的汇集仓,经推送装置推送全部药品到对应用户的汇集仓,汇集仓升高到用户取药窗口高度;(3)药房机器人药箱药品经传送带到达履带装置,履带装置承载全部药品后,履带装置升到对应用户的汇集仓的高度,经推送装置推送全部药品到对应用户的汇集仓。
87.本技术的一个实施例的一种多联药房机器人输送药品的系统包括药房机器人、物联网联结的其他医疗机器人、远程智能医疗系统、移动智能终端、云服务器、处理器以及存储在存储器上并在处理器上运行的计算机指令、算法,所述计算机指令被处理器运行时,完成多联药房机器人输送药品。
88.本技术的一个实施例的一种计算机可读取存储介质存储指令、程序、代码集或指令集,所述指令、所述程序、所述代码集或指令集由处理器加载并执行以实现多联药房机器人输送药品。
89.本技术旨在涵盖本技术的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本技术的一般性原理并包括本技术未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本技术的范围仅由所附的权利要求来限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1