一种自动对中及角度分割的智能扫码设备
1.本发明涉及一种用于货物管理领域的读码装置,特别涉及一种自动对中及角度分割的智能扫码设备。
背景技术:
2.二维码又称为二维条码,指用某种特定的几何图形按一定规律在平面(二维方向上)分布的、黑白相间的、记录数据符号信息的图形;在代码编制上巧妙地利用构成计算机内部逻辑基础的“0”、“1”比特流的概念,使用若干个与二进制相对应的几何形体来表示文字数值信息,通过图象输入设备或光电扫描设备自动识读以实现信息自动处理,它具有条码技术的一些共性:每种码制有其特定的字符集;每个字符占有一定的宽度;具有一定的校验功能等。同时还具有对不同行的信息自动识别功能、及处理图形旋转变化点。
3.当前,物流行业随着网购的繁荣而快速发展,对于货物仓储的管理水平要求也逐渐升高,如今各式产品外包装上大都黏贴有包含其生产各个过程信息的二维码,通过读取识别码来识别和分类货物,以便实时跟踪产品入库储备、销售流通等各个环节。激光传感器在工作时能够向检测目标射出一束激光,激光到达检测目标后经反射向各个方向散射,部分散射光能够返回到传感器的接收器,光的传播速度很快,记录从激光发出到传感器接收到反射回的激光的时间便可算出离检测目标距离。
4.目前市场上现有的大多数的读码装置可进行正常读码工作的范围较小且自动修正的灵活度不高,效率低,需要更大的读取范围时,许多情况下需要牺牲较大的行程来换取可读码的范围;在货物较多的情况下,往往货物会以不同的角度进入到扫码范围内,如果二维码不是正对扫码设备则会给扫码带来一定难度,无法准确扫描就会影响工作效率,这时一般会采用人工调整货物角度的方式来帮助扫码设备继续工作,但因此占用大量的人工,自动化程度低。
5.因此希望提供一种结合激光传感器的读码装置,能够自动将货物对中、调整货物角度,结合实时测距结果对读码器的空间位置进行实时调整,从而获得更大的读取角度、更快的读码速度以及精准度。
技术实现要素:
6.为了解决上述技术问题,本发明提供一种自动对中及角度分割的智能扫码设备,包括对中输送装置、旋转载物台、读码装置和工控机,所述的对中输送装置设在旋转载物台前方,旋转载物台设在读码装置前方;
7.所述的对中输送装置包括输送架和对中机构,输送架上并排枢接有数个输送滚筒,输送滚筒可以与动力输出装置相连为其提供动力,即可实现自动传送的功能;对中机构设在输送架下方,所述的对中机构的两侧的对中推杆从输送架的输送滚筒之间向上伸出;对中机构与工控机相连,可以通过电线连接或者无线通信连接;
8.所述的旋转载物台包括载物台底架、凸轮分割器、驱动电机、支撑架、制动滚筒载
物台和导向挡板;所述的凸轮分割器固定在载物台底架上,驱动电机固定在凸轮分割器的侧边,驱动电机的输出轴与凸轮分割器的一端输入轴相连;支撑架底部与凸轮分割器上部的输出轴相连,制动滚筒载物台固定在支撑架上部,制动滚筒载物台的两侧分别设有导向挡板;对中输送装置的输送架与旋转载物台的制动滚筒载物台对接;驱动电机与工控机相连,可以通过电线连接或者无线通信连接;
9.所述的读码装置包括架体、三轴移动机构、扫码设备和激光测距传感器;所述的三轴移动机构设在架体内,扫码设备与三轴移动机构相连,由三轴移动机构带动沿前后、上下、左右三轴向运动;激光测距传感器设在扫码设备上,三轴移动机构、扫码设备和激光测距传感器分别与工控机相连,可以通过电线连接或者无线通信连接。
10.所述的输送架上设有第一光电开关,第一光电开关与工控机相连;所述的对中机构包括对中机构底架、第一气缸、第二气缸、第一滑轨支架、第二滑轨支架、滑轨、第一移动板、第二移动板和对中推杆,所述的第一气缸、第二气缸、第一滑轨支架、第二滑轨支架沿对中机构底架的横向平行设在对中机构底架上部,第一滑轨支架和第二滑轨支架设在外侧,第一气缸和第二气缸设在第一滑轨支架和第二滑轨支架内侧;第一滑轨支架和第二滑轨支架的两端分别设有滑轨,第一移动板通过滑块与设在第一滑轨支架和第二滑轨支架同一端的滑轨相连,第二移动板通过滑块与设在第一滑轨支架和第二滑轨支架另一端的滑轨相连;第一移动板和第二移动板上分别等距设有数个对中推杆;第一气缸和第二气缸的活塞杆头端与第一移动板相连,第一气缸和第二气缸的缸体尾端与第二移动板相连。
11.还包括气动三联件、电磁阀和手滑阀,电磁阀和气动三联件分别设在对中机构底架上,第一气缸和第二气缸分别通过管路与气动三联件、电磁阀和气源顺次相连,电磁阀与工控机相连;手滑阀安装在气动三联件上;所述的第一滑轨支架和第二滑轨支架的外侧端部分别设有外限位块,用于限制第一移动板和第二移动板外侧的极限位置,第一移动板和第二移动板内侧的对中机构底架上分别设有内限位块,用于限制第一移动板和第二移动板内侧的极限位置。
12.所述的对中输送装置的输送架底部设有螺栓连接板;所述的载物台底架包括载物台底板、护板框架、地脚和螺栓连接板,所述的护板框架固定在载物台底板上,护板框架的四个角分别设有地脚和螺栓连接板;所述的读码装置的架体底部设有地脚和螺栓连接板。
13.所述的旋转载物台的支撑架包括支撑底板、支撑横梁和第一制动器,所述的支撑底板下部与凸轮分割器的输出轴固定连接,支撑横梁设在支撑底板上,第一制动器固定在支撑横梁上;所述的旋转载物台的制动滚筒载物台包括滚筒固定架和制动滚筒,滚筒固定架分别设在支撑横梁的两端,数根制动滚筒并排枢接在两端的滚筒固定架之间,相邻的两个制动滚筒之间通过第一传动带传动连接;第一制动器的输出轴通过第二传动带与制动滚筒传动连接,第一制动器与工控机相连;支撑底板的下部设有旋转位置检测传感器,凸轮分割器的四周设有与旋转位置检测传感器相匹配的旋转位置检测开关架;凸轮分割器的输入轴的另一端设有角度检测块,在凸轮分割器的侧边,与角度检测块对应的位置设有角度检测传感器;凸轮分割器的输出轴中部设有滑环,滑环通过两侧的滑环固定板固定在凸轮分割器的输出轴上,支撑底板中间设有通孔,凸轮分割器上的滑环位于通孔内,支撑底板的通孔上方设有滑环保护罩;旋转位置检测传感器通过滑环与工控机相连,角度检测传感器与工控机相连。
14.所述的第一制动器一端通过制动器第一固定板与支撑横梁固定连接,第一制动器的输出轴上设有制动滚轮,第一制动器输出轴的另一端与制动器第二固定板枢接,制动器第二固定板与支撑横梁固定连接;第二传动带套设于制动滚筒和制动滚轮之间。
15.所述的导向挡板上设有数个并排设置的导向轮组件,所述的导向轮组件包括轴承轴、导向轮;所述的轴承轴竖直固定在导向挡板上,导向轮通过轴承枢接在轴承轴上;导向挡板上对应导向轮的位置开设有导向轮位孔,导向轮从导向轮位孔中伸出;两组导向挡板相对设置,导向挡板的入口端向外张开一定角度;导向挡板中部设有第二光电开关,第二光电开关通过设在凸轮分割器的输出轴中部的滑环与工控机相连。
16.制动滚筒载物台的入口端设有连接台,连接台固定在支撑架上,连接台上通过滚筒支架和轴承枢接有辅助滚筒;制动滚筒载物台的尾端设有尾端挡板。
17.所述的三轴移动机构包括前后移动机构、上下移动机构和左右移动机构,所述的前后移动机构包括滑动轴、滑动架、第一步进电机和同步带;所述的滑动轴分别设在架体的左右两侧,每根滑动轴的前后两端分别通过滑动轴固定座与架体的前后立柱相连;滑动架上设有滑动轴承,滑动架通过滑动轴承套设在滑动轴上与滑动轴相连,能够沿滑动轴前后滑动;第一步进电机设在架体的立柱上,与第一步进电机同一侧相对的架体立柱上设有同步带固定轴,同步带设在第一步进电机的输出轴与同步带固定轴之间;滑动架的侧边与同步带固定连接,第一步进电机输出转矩通过同步带同步传递带动滑动架沿滑动轴前后滑动;第一步进电机与工控机相连,受工控机的信号控制;
18.所述的上下移动机构包括一对竖直直线导轨、第二步进电机、减速器、第二制动器和联轴器,所述的一对竖直直线导轨平行竖直设置,与前后移动机构的滑动架固定连接;所述的第二步进电机固定在一侧竖直直线导轨的顶部,输出轴与减速器输入轴相连,减速器输出轴与一侧竖直直线导轨的输入轴相连,并穿过该直线导轨通过连接轴与第二制动器相连,第二制动器的另一端通过联轴器与另一侧的竖直直线导轨的输入轴相连,第二步进电机运行能同时带动两个竖直直线导轨的滑台同步上下移动;第二步进电机、第二制动器与工控机相连,受工控机的信号控制;
19.所述的左右移动机构包括水平直线导轨、第三步进电机,所述的水平直线导轨与上下移动机构的竖直直线导轨的滑台相连;第三步进电机设在水平直线导轨的一端,输出轴与水平直线导轨的输入轴相连,第三步进电机运行能带动水平直线导轨的滑台左右移动;第三步进电机与工控机相连,受工控机的信号控制。
20.所述的扫码设备包括扫码器固定板和三个扫码器,所述的扫码器固定板与左右移动机构的水平直线导轨的滑台相连,三个扫码器并排设在扫码器固定板上,并分别与工控机相连,与工控机进行数据交互;所述的激光测距传感器也设在扫码器固定板上。
21.前后移动机构下方架体的横梁的前后两端分别设有前后光电开关,前后光电开关与工控机相连,受工控机的信号控制;前后移动机构的滑动架上设有与前后光电开关对应的遮光板,当前后移动机构的滑动架移动到前后某一端的前后光电开关处触发前后光电开关发出信号给工控机,工控机控制第一步进电机停止运行或反向运行,从而起到限位作用;
22.所述的竖直直线导轨的上下两端分别设有上下光电开关,上下光电开关与工控机相连,受工控机的信号控制;竖直直线导轨的滑台处设有与上下光电开关对应的遮光板,当上下移动机构的滑台移动到上下某一端的上下光电开关处触发上下光电开关发出信号给
工控机,工控机控制第二步进电机停止运行或反向运行,从而起到限位作用;
23.所述的水平直线导轨的左右两端分别设有左右光电开关,左右光电开关与工控机相连,受工控机的信号控制;水平直线导轨的滑台处设有与左右光电开关对应的遮光板,当左右移动机构的滑台移动到左右某一端的左右光电开关处触发左右光电开关发出信号给工控机,工控机控制第三步进电机停止运行或反向运行,从而起到限位作用。
24.所述的前后移动机构设有第一拖链,第一拖链的托板固定在架体上,沿架体前后向设置;上下移动机构设有第二拖链,第二拖链的托板固定在前后移动机构的滑动架上,沿滑动架竖向设置;左右移动机构设有第三拖链,第三拖链的托板固定在左右移动机构的水平直线导轨下部。第一拖链、第二拖链和第三拖链用于扫码设备在往复运动的过程中,对内置的电线起到牵引和保护作用。
25.所述的架体上还设有触控面板、报警灯和计数器,触控面板、报警灯和计数器分别与工控机相连,受工控机的信号控制,触控面板输入信息,与工控机进行数据交互,当出现紧急情况是工控机控制报警灯闪亮报警,计数器用于显示技术情况;所述的架体下部还设有配电箱,配电箱与工控机通过电线连接,为整个装置提供电能。
26.本发明的工作原理及过程:
27.制动滚筒载物台由工控机输出控制信息控制驱动电机启动,带动凸轮分割器的凸轮轴转动,从而带动与之啮合的出力转塔旋转,由输出轴输出扭矩带动支撑架及制动滚筒载物台旋转一定的角度,使制动滚筒载物台在初始位置连接台与输送架对接。
28.需要输送的货料被叉车或者其他装置放到对中输送装置的输送架上,触发第一光电开关,由工控机发出控制信号给电磁阀,进而控制第一气缸和第二气缸的活塞杆收缩,拉动第一移动板和第二移动板沿第一滑轨支架和第二滑轨支架上的滑轨相向运动,第一移动板和第二移动板上的对中推杆使上面的货料达到居中对齐的效果,在货料居中后,通过调节电磁阀使第一移动板和第二移动板向外运动,分别到达外限位块后将停止运动,然后通过人工或者机械装置将货料推入与输送架对接的制动滚筒载物台上。
29.货料通过输送架送上连接台,在惯性的作用下货料通过连接台上的辅助滚筒继续向前移动至制动滚筒载物台上,当货料到达制动滚筒载物台中部位置时,会触发导向挡板中部的第二光电开关,第二光电开关输出信号给工控机,然后工控机输出控制信息控制第一制动器运行,由制动滚轮带动第二传动带牵引制动滚筒沿着货料移动的反方向转动,进而通过第一传动带相互传动带动所有制动滚筒转动,达到对货料的制动效果,使货料停在制动滚筒载物台上,还可以根据货物的重量由工控机控制制动器输出不同的制动力,来保证货料都能停在制动滚筒载物台上的适当位置;导向挡板及导向轮起到导向的作用;在货料停稳之后,驱动电机再启动,带动凸轮分割器的凸轮轴转动,从而带动与之啮合的出力转塔间歇旋转,由输出轴输出扭矩带动制动滚筒载物台旋转,使货料间歇旋转,每次旋转90度,确保每个面的二维码均能够被扫描;旋转位置检测传感器通过旋转位置检测开关架相配合以检测货料旋转的位置角度并发送信号给工控机,凸轮分割器的角度检测传感器通过角度检测块相配合以检测输入轴所转动的角度并发送信号给工控机,由工控机控制驱动电机转动相应的转矩,使货物标码朝向读码装置。
30.读码装置的激光测距传感器对目标货物的二维码位置进行测距,由工控机计算得出扫码器到达能够清晰扫码的位置需要移动的空间距离,分别输出前后、左右、上下的移动
控制信号给第一步进电机、第二步进电机和第三步进电机;然后,第一步进电机通过同步带带动前后移动机构的滑动架沿滑动轴滑动到指定距离,第二步进电机带动上下移动机构的竖直直线导轨的滑台滑动,从而带动左右移动机构在竖直方向运动到指定高度,第三步进电机带动左右移动机构的水平直线导轨的滑台滑动,从而带动扫码器固定板运动到最终位置,实现扫码器的自动定位;最后,扫码器对货物二维码进行拍摄扫描,完成扫码工作。
31.本发明的有益效果:
32.本发明对中机构通过气缸驱动使两旁的对中推板以相同的速度相对运动实现货物的自动对中,通过凸轮分割器进行间歇式回转运动,与槽轮、棘轮等传统间歇机构相比,传动平稳、动作准确、输出分割精度高、高速性能好,且完全不需要其它锁紧元件,可实现任意确定的动静比和分割数,保证制动滚筒载物台转动角精准;在第一制动器和制动滚筒的配合下能有效使货物精准制动,停在适当位置;在对货物二维码进行读取时,通过激光测距传感器快速测得扫码器和二维码的距离,前后、上下、左右结构的移动能自动调解扫码器的焦距,从而对扫码器的空间位置三维数据进行修正使得读取到高质量的二维码图像,避免错误或无法获取二维码中的信息,加快货物的入库及信息的更新。采用三个扫码器并排安放,能获取更大的读取角度从而使得机构移动的行程变短缩小了读码的时间,拍摄范围大速度快,极大的提高了读码的效率。本发明具有综合功能,采用气压和电力驱动,绿色环保,实现产品包装箱自动对中,轻巧调节,360度旋转,自动调节扫码范围,适应不同尺寸包装箱上二维码的精准、高效、稳定识别,并可以智能排序二维码信息,进行产品信息及时储存,自动化程度高,应用场景广泛,适用于市场推广。
附图说明
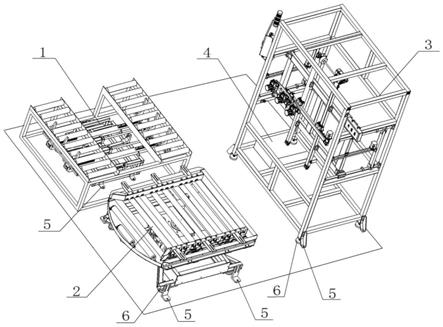
33.图1为本发明整体结构示意图;
34.图2为本发明对中输送装置结构示意图;
35.图3为本发明对中输送装置的对中机构结构示意图;
36.图4为本发明旋转载物台结构示意图;
37.图5为本发明旋转载物台的载物台底架结构示意图;
38.图6为本发明旋转载物台的凸轮分割器结构示意图;
39.图7为本发明旋转载物台的支撑架结构示意图;
40.图8为本发明旋转载物台的制动滚筒载物台结构示意图;
41.图9为本发明旋转载物台的制动器结构示意图;
42.图10为本发明旋转载物台的制动器剖视结构示意图;
43.图11为本发明读码装置结构示意图;
44.图12为本发明读码装置的前后移动机构结构示意图;
45.图13为本发明读码装置的上下移动机构和左右移动机构结构示意图;
46.图14为本发明读码装置的左右移动机构和扫码设备结构示意图;
47.1、对中输送装置,2、旋转载物台,3、读码装置,4、工控机,5、螺栓连接板,6、地脚;
48.101、输送架,102、对中机构,103、输送滚筒,104、第一光电开关,105、对中机构底架,106、第一气缸,107、第二气缸,108、第一滑轨支架,109、第二滑轨支架,110、滑轨,111、第一移动板,112、第二移动板,113、对中推杆,114、气动三联件,115、电磁阀,116、手滑阀,
117、外限位块,118、内限位块;
49.201、载物台底架,202、凸轮分割器,203、驱动电机,204、支撑架,205、制动滚筒载物台,206、导向挡板,207、载物台底板,208、护板框架,210、支撑底板,211、第一支撑横梁,212、第二支撑横梁,213、第三支撑横梁,214、第四支撑横梁,215、第一制动器,216、滚筒固定架,217、制动滚筒,218、第一传动带,219、第二传动带,220、旋转位置检测传感器,221、旋转位置检测开关架,222、角度检测块,223、角度检测传感器,224、滑环,225、滑环固定板,226、滑环保护罩,227、制动器第一固定板,228、制动滚轮,229、制动器第二固定板,230、轴承轴,231、导向轮,232、导向轮位孔,233、第二光电开关,234、连接台,235、辅助滚筒,236、尾端挡板;
50.301、架体,302、三轴移动机构,303、扫码设备,304、激光测距传感器,305、滑动轴,306、滑动架,307、第一步进电机,308、同步带,309、滑动轴固定座,310、滑动轴承,311、同步带固定轴,312、竖直直线导轨,313、第二步进电机,314、减速器,315、第二制动器,316、联轴器,317、滑台,318、水平直线导轨,319、第三步进电机,320、扫码器固定板,321、扫码器,322、前后光电开关,323、遮光板,324、上下光电开关,325、左右光电开关,326、第一拖链,327、第二拖链,328、第三拖链,329、触控面板,330、报警灯,331、计数器,332、配电箱。
具体实施方式
51.请参阅图1-14所示:
52.本发明实施例提供一种自动对中及角度分割的智能扫码设备,包括对中输送装置1、旋转载物台2、读码装置3和工控机4,所述的对中输送装置1设在旋转载物台2前方,旋转载物台2设在读码装置3前方,本实施例中工控机4设在读码装置3的架体301下部;
53.所述的对中输送装置1包括输送架101和对中机构102,输送架101上并排枢接有数个输送滚筒103,输送滚筒103可以与动力输出装置相连为其提供动力,即可实现自动传送的功能;对中机构102设在输送架101下方,所述的对中机构102的两侧的对中推杆113从输送架101的输送滚筒103之间向上伸出;对中机构102与工控机4通过电线连接;
54.所述的旋转载物台2包括载物台底架201、凸轮分割器202、驱动电机203、支撑架204、制动滚筒载物台205和导向挡板206;所述的凸轮分割器202固定在载物台底架201上,驱动电机203固定在凸轮分割器202的侧边,驱动电机203的输出轴与凸轮分割器202的一端输入轴相连;支撑架204底部与凸轮分割器202上部的输出轴相连,制动滚筒载物台205固定在支撑架204上部,制动滚筒载物台205的两侧分别设有导向挡板206;对中输送装置1的输送架101与旋转载物台2的制动滚筒载物台205对接;驱动电机203与工控机4通过电线连接;
55.所述的读码装置3包括架体301、三轴移动机构302、扫码设备303、激光测距传感器304;所述的三轴移动机构302设在架体301内,扫码设备303与三轴移动机构302相连,由三轴移动机构302带动沿前后、上下、左右三轴向运动;激光测距传感器304设在扫码设备303上,三轴移动机构302、扫码设备303和激光测距传感器304分别与工控机4通过电线连接。
56.所述的输送架101上设有第一光电开关104,第一光电开关104与工控机4相连;所述的对中机构102包括对中机构底架105、第一气缸106、第二气缸107、第一滑轨支架108、第二滑轨支架109、滑轨110、第一移动板111、第二移动板112和对中推杆113,所述的第一气缸106、第二气缸107、第一滑轨支架108、第二滑轨支架109沿对中机构底架105的横向平行设
在对中机构底架105上部,第一滑轨支架108和第二滑轨支架109设在外侧,第一气缸106和第二气缸107设在第一滑轨支架108和第二滑轨支架109内侧;第一滑轨支架108和第二滑轨支架109的两端分别设有滑轨110,第一移动板111通过滑块与设在第一滑轨支架108和第二滑轨支架109同一端的滑轨110相连,第二移动板112通过滑块与设在第一滑轨支架108和第二滑轨支架109另一端的滑轨110相连;第一移动板111和第二移动板112上分别等距设有3个对中推杆113;第一气缸106和第二气缸107的活塞杆头端与第一移动板111相连,第一气缸106和第二气缸107的缸体尾端与第二移动板112相连。
57.还包括气动三联件114、电磁阀115和手滑阀116,电磁阀115和气动三联件114分别设在对中机构底架105上,第一气缸106和第二气缸107分别通过管路与气动三联件114、电磁阀115和气源顺次相连,电磁阀115与工控机4相连;手滑阀116安装在气动三联件114上;所述的第一滑轨支架108和第二滑轨支架109的外侧端部分别设有外限位块117,用于限制第一移动板111和第二移动板112外侧的极限位置,第一移动板111和第二移动板112内侧的对中机构底架105上分别设有内限位块118,用于限制第一移动板111和第二移动板112内侧的极限位置。
58.所述的对中输送装置1的输送架101底部设有螺栓连接板5;所述的载物台底架201包括载物台底板207、护板框架208、地脚6和螺栓连接板5,所述的护板框架208固定在载物台底板207上,护板框架208的四个角分别设有地脚6和螺栓连接板5;所述的读码装置3的架体301底部设有地脚6和螺栓连接板5,地脚6和螺栓连接板5用于固定装置。
59.所述的旋转载物台2的支撑架204包括支撑底板210、第一支撑横梁211、第二支撑横梁212、第三支撑横梁213、第四支撑横梁214和第一制动器215,所述的支撑底板210下部与凸轮分割器202的输出轴固定连接,第二支撑横梁212和第三支撑横梁213设在支撑底板210上,两个第一制动器215分别固定在第一支撑横梁211与第二支撑横梁212之间和第三支撑横梁213与第四支撑横梁214之间;所述的旋转载物台2的制动滚筒载物台205包括滚筒固定架216和制动滚筒217,滚筒固定架216分别设在第一支撑横梁211、第二支撑横梁212、第三支撑横梁213、第四支撑横梁214的两端,数根制动滚筒217并排枢接在两端的滚筒固定架216之间,相邻的两个制动滚筒217之间通过第一传动带218传动连接;前后两个第一制动器215的输出轴分别通过第二传动带219与前数第二根制动滚筒217和后数第二根制动滚筒217传动连接,两个第一制动器215分别与工控机4相连;支撑底板210的下部设有旋转位置检测传感器220,凸轮分割器202的四周设有与旋转位置检测传感器220相匹配的旋转位置检测开关架221;凸轮分割器202的输入轴的另一端设有角度检测块222,在凸轮分割器202的侧边,与角度检测块222对应的位置设有角度检测传感器223;凸轮分割器202的输出轴中部设有滑环224,滑环224通过两侧的滑环固定板225固定在凸轮分割器202的输出轴上,支撑底板210中间设有通孔,滑环224位于通孔内,支撑底板210的通孔上方设有滑环保护罩226;旋转位置检测传感器220通过滑环224与工控机4相连,角度检测传感器223与工控机4相连。
60.所述的第一制动器215一端通过制动器第一固定板227与支撑横梁固定连接,第一制动器215的输出轴上设有制动滚轮228,第一制动器215输出轴的另一端通过深沟球轴承及轴承座与制动器第二固定板229枢接,制动器第二固定板229与支撑横梁固定连接;第二传动带219套设于制动滚筒217和制动滚轮228之间。
61.所述的导向挡板206上设有数个并排设置的导向轮组件,所述的导向轮组件包括轴承轴230、导向轮231和深沟球轴承;所述的轴承轴230竖直固定在导向挡板206上,导向轮231通过深沟球轴承枢接在轴承轴230上;导向挡板206上对应导向轮231的位置开设有导向轮位孔232,导向轮231从导向轮位孔232中伸出;两组导向挡板206相对设置,导向挡板206的入口端向外张开一定角度;导向挡板206中部设有第二光电开关233,第二光电开关233通过导线、滑环224与工控机4相连。
62.制动滚筒载物台205的入口端设有连接台234,连接台234固定在支撑架204上,连接台234上通过滚筒支架和轴承枢接有辅助滚筒235;制动滚筒载物台205的尾端设有尾端挡板236,防止系统断电导致货物掉落。
63.所述的三轴移动机构302包括前后移动机构、上下移动机构和左右移动机构,所述的前后移动机构包括滑动轴305、滑动架306、第一步进电机307和同步带308;所述的滑动轴305分别设在架体301的左右两侧,每根滑动轴305的前后两端分别通过滑动轴固定座309与架体301的前后立柱相连;滑动架306上设有滑动轴承310,滑动架306通过滑动轴承310套设在滑动轴305上与滑动轴305相连,能够沿滑动轴305前后滑动;第一步进电机307设在架体301的立柱上,与第一步进电机307同一侧相对的架体301立柱上设有同步带固定轴311,同步带308设在第一步进电机307的输出轴与同步带固定轴311之间;滑动架306的侧边与同步带308固定连接,第一步进电机307输出转矩通过同步带308同步传递带动滑动架306沿滑动轴305前后滑动;第一步进电机307与工控机4相连,受工控机4的信号控制;
64.所述的上下移动机构包括一对竖直直线导轨312、第二步进电机313、减速器314、第二制动器315和联轴器316,所述的一对竖直直线导轨312平行竖直设置,与前后移动机构的滑动架306固定连接;所述的第二步进电机313固定在一侧竖直直线导轨312的顶部,输出轴与减速器314输入轴相连,减速器314输出轴与该侧竖直直线导轨312的输入轴相连,并穿过该直线导轨通过连接轴与第二制动器315相连,第二制动器315的另一端通过联轴器316与另一侧的竖直直线导轨312的输入轴相连,第二步进电机313运行能同时带动两个竖直直线导轨312的滑台317同步上下移动;第二步进电机313、第二制动器315与工控机4相连,受工控机4的信号控制;
65.所述的左右移动机构包括水平直线导轨318、第三步进电机319,所述的水平直线导轨318与上下移动机构的竖直直线导轨312的滑台317相连;第三步进电机319设在水平直线导轨318的一端,输出轴与水平直线导轨318的输入轴相连,第三步进电机319运行能带动水平直线导轨318的滑台317左右移动;第三步进电机319与工控机4相连,受工控机4的信号控制。
66.所述的扫码设备303包括扫码器固定板320和三个扫码器321,所述的扫码器固定板320与左右移动机构的水平直线导轨318的滑台317相连,三个扫码器321并排设在扫码器固定板320上,并分别与工控机4相连,与工控机4进行数据交互;所述的激光测距传感器304也设在扫码器固定板320上。
67.前后移动机构下方架体301的横梁的前后两端分别设有前后光电开关322,前后光电开关322与工控机4相连,受工控机4的信号控制;前后移动机构的滑动架306上设有与前后光电开关322对应的遮光板323,当前后移动机构的滑动架306移动到前后某一端的前后光电开关322处触发前后光电开关322发出信号给工控机4,工控机4控制第一步进电机307
停止运行或反向运行,从而起到限位作用;
68.所述的竖直直线导轨312的上下两端分别设有上下光电开关324,上下光电开关324与工控机4相连,受工控机4的信号控制;竖直直线导轨312的滑台317处设有与上下光电开关324对应的遮光板323,当上下移动机构的滑台317移动到上下某一端的上下光电开关324处触发上下光电开关324发出信号给工控机4,工控机4控制第二步进电机313停止运行或反向运行,从而起到限位作用;
69.所述的水平直线导轨318的左右两端分别设有左右光电开关325,左右光电开关325与工控机4相连,受工控机4的信号控制;水平直线导轨318的滑台317处设有与左右光电开关325对应的遮光板323,当左右移动机构的滑台317移动到左右某一端的左右光电开关325处触发左右光电开关325发出信号给工控机4,工控机4控制第三步进电机319停止运行或反向运行,从而起到限位作用。
70.所述的前后移动机构设有第一拖链326,第一拖链326的托板固定在架体301上,沿架体301前后向设置;上下移动机构设有第二拖链327,第二拖链327的托板固定在前后移动机构的滑动架306上,沿滑动架306竖向设置;左右移动机构设有第三拖链328,第三拖链328的托板固定在左右移动机构的水平直线导轨318下部。第一拖链326、第二拖链327和第三拖链328用于扫码设备303在往复运动的过程中,对内置的电线起到牵引和保护作用。
71.所述的架体301上还设有触控面板329、报警灯330和计数器331,触控面板329、报警灯330和计数器331分别与工控机4相连,受工控机4的信号控制,触控面板329输入信息,与工控机4进行数据交互,当出现紧急情况是工控机4控制报警灯330闪亮报警,计数器331用于显示技术情况;所述的架体301下部还设有配电箱332,配电箱332与工控机4通过电线连接,为整个装置提供电能。
72.本发明的工作原理及过程:
73.制动滚筒载物台205由工控机4输出控制信息控制驱动电机203启动,带动凸轮分割器202的凸轮轴转动,从而带动与之啮合的出力转塔旋转,由输出轴输出扭矩带动支撑架204及制动滚筒载物台205旋转一定的角度,使制动滚筒载物台205在初始位置时连接台234与输送架101对接。
74.需要输送的货料被叉车或者其他装置放到对中输送装置1的输送架101上,触发第一光电开关104,由工控机4发出控制信号给电磁阀115,进而控制第一气缸106和第二气缸107的活塞杆收缩,同时拉动第一移动板111和第二移动板112沿第一滑轨支架108和第二滑轨支架109上的滑轨110相向运动,第一移动板111和第二移动板112上的对中推杆113使上面的货料达到居中对齐的效果,在货料居中后,通过调节电磁阀115使第一移动板111和第二移动板112向外运动,分别到达外限位块117后将停止运动,然后通过人工或者机械装置将货料推入与输送架101对接的制动滚筒载物台205上。
75.货料通过输送架101送上连接台234,在惯性的作用下货料通过连接台234上的辅助滚筒235继续向前移动至制动滚筒载物台205上,当货料到达制动滚筒载物台205中部位置时,会触发导向挡板206中部的第二光电开关233,第二光电开关233输出信号给工控机4,然后工控机4输出控制信息控制第一制动器215运行,由制动滚轮228带动第二传动带219牵引制动滚筒217沿着货料移动的反方向转动,进而通过第一传动带218相互传动带动所有制动滚筒217转动,达到对货料的制动效果,使货料停在制动滚筒载物台205上,还可以根据货
物的重量由工控机4控制制动器输出不同的制动力,来保证货料都能停在制动滚筒载物台205上的适当位置;导向挡板206及导向轮231起到导向的作用;在货料停稳之后,驱动电机203再启动,带动凸轮分割器202的凸轮轴转动,从而带动与之啮合的出力转塔间歇旋转,由输出轴输出扭矩带动制动滚筒载物台205旋转,使货料间歇旋转,每次旋转90度,确保每个面的二维码均能够被扫描;旋转位置检测传感器220通过旋转位置检测开关架221相配合以检测货料旋转的位置角度并发送信号给工控机4,凸轮分割器202的角度检测传感器223通过角度检测块222相配合以检测输入轴所转动的角度并发送信号给工控机4,由工控机4控制驱动电机203转动相应的转矩,使货物标码朝向读码装置3。
76.读码装置3的激光测距传感器304对目标货物的二维码位置进行测距,由工控机4计算得出扫码器到达能够清晰扫码的位置需要移动的空间距离,分别输出前后、左右、上下的移动控制信号给第一步进电机307、第二步进电机313和第三步进电机319;然后,第一步进电机307通过同步带308带动前后移动机构的滑动架306沿滑动轴305滑动到指定距离,第二步进电机313带动上下移动机构的竖直直线导轨312的滑台317滑动,从而带动左右移动机构在竖直方向运动到指定高度,第三步进电机319带动左右移动机构的水平直线导轨318的滑台317滑动,从而带动扫码器固定板320运动到最终位置,实现扫码器321的自动定位;最后,扫码器321对货物二维码进行拍摄扫描,完成扫码工作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1