一种带制动器和螺旋伞齿传动的新型行星减速机的制作方法
1.本技术涉及绞车制动技术领域,特别涉及一种带制动器和螺旋伞齿传动的新型行星减速机。
背景技术:
2.在面对需要重型拉力的工作中,传动设备是绞车中必不可少的一种关键设备,性能的好坏直接影响钻机的工作质量和工作效率,行星减速机在绞车的传动设备中主要起到减缓转速,以使卷筒转速趋于合适范围值的功能;制动器同样是绞车中必备的设备,可起到快速制动的作用。目前现有技术中,制动器与行星减速机分别不同的动力源,因此在发生紧急情况需要制动时,人们往往会忘记关闭行星减速机的动力源,从而使得制动器的动力源与行星减速机的动力源存在同时开启的状况,这不仅为降低制动器的制动效果,同时也会加剧制动片的磨损,影响其使用寿命。
技术实现要素:
3.为了克服现有技术的不足,本实用新型的目的在于提供一种带制动器和螺旋伞齿传动的新型行星减速机,使得行星齿轮机构与制动器共用一个动力源,且动力源单次可仅驱动行星齿轮机构或制动器工作,从而避免制动器的动力源与行星减速机的动力源存在同时开启的状况。
4.为达到以上目的,本技术提供一种带制动器和螺旋伞齿传动的新型行星减速机,包括机体、卷筒和制动器,所述机体内设有行星齿轮机构和驱动机构;
5.所述行星齿轮机构包括太阳轮和行星轮,所述太阳轮与所述行星轮啮合连接,所述太阳轮同轴连接有卷筒,所述行星轮同轴连接有第一斜齿轮;
6.所述制动器包括制第二斜齿轮,所述驱动机构包括第一电机、由第一电机驱动的第三斜齿轮和第四斜齿轮,所述驱动机构可驱动所述第三斜齿轮与所述第一斜齿轮啮合连接,以使所述卷筒转动,或驱动所述第二斜齿轮与第四斜齿轮啮合连接,以使所述制动器对所述卷筒进行制动。
7.与现有技术相比,本技术的有益效果在于:驱动机构作为行星齿轮机构和制动器的动力源,可选择单次与行星齿轮机构配合连接或与制动器配合连接,以驱使卷筒转动或制止卷筒转动,当用户需要制止卷筒转动时,可通过驱动机构切换配合单位,使得卷筒经历失去动力源,被制动器制动的过程,避免了用户忘记关闭卷筒的动力源,而导致驱动器制动的同时动力源仍然在驱动驱动器状况的发生,可使关闭卷筒的动力源
‑
启动制动器的这一步骤一体化,可有效避免制动器的动力源与行星减速机的动力源存在同时开启的状况,增强制动效果,提高制动器的实用寿命。
8.作为改进,所述制动器还包括第一丝杆和第二斜齿轮,所述第二斜齿轮固定连接在所述第一丝杆上,所述制动片与所述第二斜齿轮配合连接,通过上述改进,第一电机可通过电机的正反转控制制动片与卷筒抵紧配合或分离,不仅操作简单,且安装实施便捷。
9.作为改进,所述制动片的数量为两个,且两个所述制动片分别位于所述卷筒的两侧,所述丝杆转动使得所述两个制动片与所述卷筒抵紧配合,通过上述改进,两个制动片从两侧对卷筒进行制动,制动效果更好,制动片的更换周期更长。
10.作为改进,所述驱动机构还包括第二电机、滑块和由第二电机驱动的第二丝杆,所述第一电机位于所述滑块内,所述第二丝杆与所述滑块配合连接,所述第二电机驱动所述第二丝杆转动以使所述第三斜齿轮与所述第一斜齿轮啮合连接或所述第二斜齿轮与第四斜齿轮啮合连接,通过上述改进,通过滑块使得第一电机、第三斜齿轮和第四斜齿轮移动,从而完成第三斜齿轮与第一斜齿轮啮合连接或第二斜齿轮与第四斜齿轮啮合连接,整个过程可电控和手控制,便于用户操作。
11.作为改进,所述第二电机可被配置为一键模式,即通过特定按钮控制所述第二电机由所述第三斜齿轮与所述第一斜齿轮啮合连接的状态,转变为由所述第二斜齿轮与第四斜齿轮啮合连接的状态,设置一键模式可简化用户的操作,提升工作效率。
附图说明
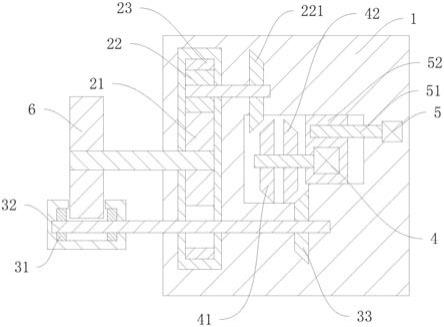
12.图1为本技术中的卷筒与制动器均为启动状态下的整体结构剖视图;
13.图2为本技术中的驱动机构驱使卷筒转动时的整体结构剖视图;
14.图3为本技术中的驱动机构驱使制动器制动时的整体结构剖视图。
15.图中:1、机体;21、太阳轮;22、行星轮;221、第一斜齿轮;23、行星架;31、制动片;32、第一丝杆;33、第二斜齿轮;4、第一电机;41、第三斜齿轮;42、第四斜齿轮;5、第二电机;51、第二丝杆;52、滑块;6、卷筒。
具体实施方式
16.下面,结合具体实施方式,对本技术做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
17.在本技术的描述中,需要说明的是,对于方位词,如有术语“中心”、“上”、“下”、“前”、“后”、“竖直”、“水平”、“内”、“外”等指示方位和位置关系为基于附图所示的方位或位置关系,仅是为了便于叙述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定方位构造和操作,不能理解为限制本技术的具体保护范围。
18.需要说明的是,本技术的说明书和权利要求书中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。
19.本技术的说明书和权利要求书中的术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
20.本技术提供一种带制动器和螺旋伞齿传动的新型行星减速机,如图1
‑
3所示,包括机体1、卷筒6和制动器,机体1内设有行星齿轮机构和驱动机构;
21.行星齿轮机构包括太阳轮21、行星轮22和行星架23,行星轮22转动带动行星架23和太阳轮21转动,行星轮22始终在原地转动,太阳轮21与行星轮22啮合连接,太阳轮21同轴连接有卷筒6,行星轮22同轴连接有第一斜齿轮221;
22.制动器包括制第二斜齿轮33,驱动机构包括第一电机4、由第一电机4驱动的第三斜齿轮41和第四斜齿轮42,驱动机构可驱动第三斜齿轮41与第一斜齿轮221啮合连接,以使卷筒6转动,或驱动第二斜齿轮33与第四斜齿轮42啮合连接,以使制动器对卷筒6进行制动。
23.优选地,第三斜齿轮41的直径大于第一斜齿轮221的直径,因此卷筒6通过太阳轮21与行星轮22的啮合连接、第一斜齿轮221与第三斜齿轮41的啮合连接的两次降速传动,从而进一步控制卷筒6转动的速度,节省机体1内的空间,使得其结构更加紧凑,降低成本。
24.具体的,制动器还包括第一丝杆32和第二斜齿轮33,第二斜齿轮33固定连接在第一丝杆32上,制动片31与第二斜齿轮33配合连接。
25.具体的,制动片31的数量为两个,且两个制动片31分别位于卷筒6的两侧,丝杆转动使得两个制动片31与卷筒6抵紧配合。
26.具体的,驱动机构还包括第二电机5、滑块52和由第二电机5驱动的第二丝杆51,第一电机4位于滑块52内,第二丝杆51与滑块52配合连接,第二电机5驱动第二丝杆51转动以使第三斜齿轮41与第一斜齿轮221啮合连接或第二斜齿轮33与第四斜齿轮42啮合连接。
27.需要说明的是,滑块52可通过第二电机5驱动也可通过用户手动操作平移,可根据不同实际情况灵活运用。
28.具体的,第二电机5可被配置为一键模式,即通过特定按钮控制第二电机5由第三斜齿轮41与第一斜齿轮221啮合连接的状态,转变为由第二斜齿轮33与第四斜齿轮42啮合连接的状态。
29.需要说明的,第二电机5的一键模式可根据客户需求任意更改。
30.以上描述了本技术的基本原理、主要特征和本技术的优点。本行业的技术人员应该了解,本技术不受上述实施例的限制,上述实施例和说明书中描述的只是本技术的原理,在不脱离本技术精神和范围的前提下本技术还会有各种变化和改进,这些变化和改进都落入要求保护的本技术的范围内。本技术要求的保护范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1