一种机械臂式液压起重机的制作方法
1.本实用新型涉及起重机械领域的一种机械臂式液压起重机。
背景技术:
2.桥式起重机是现代工业生产和起重运输中实现生产过程自动化的重要工具和设备。现有的桥式起重机均为电力驱动,其起重钢缆为不可操控的钢索起重设备,卷扬机式的电力驱动的起重机能耗高,且钢索起重设备的可操控性和稳定性差,存在作业和运行时安全稳定性问题。
技术实现要素:
3.本实用新型发明的目的是提供一种液压驱动的、具有可操控机械臂的起重设备,一种机械臂式液压起重机,
4.本实用新型发明是通过以下技术方案实现的:
5.一种机械臂式液压起重机,包括桥式起重机基座、小车、旋转轴承和旋转轴承连接器、机械臂,其特征在于:所述桥式起重机基座由箱梁和端梁组成,箱梁连接在两端的端梁上,安装在端梁上的行走主动轮驱动箱梁沿厂房两侧的固定轨道作南北行走,小车轨道安装在箱梁上,小车包括小车主动轮、旋转轴承和旋转轴承连接器在小车主动轮驱动下沿箱梁轨道作东西移动,机械臂通过旋转轴成连接器连接在小车上;所述行走主动轮、小车主动轮和机械臂均有液压执行系统驱动;对上述技术方案做进一步的说明:所述的机械臂包括大臂主销、大臂、大臂防护裙、大臂液压缸连接销、大小臂与机械手臂连接销、小臂液压缸连接销、小臂、小臂防护裙、机械手臂、小臂伸缩导轨、机械手臂销、机械手销和机械手,大臂液压缸、小臂液压缸、机械手臂液压缸和机械手液压缸分别控制大臂、小臂、机械手臂和机械手动作;对上述技术方案做进一步的说明:所述大臂液压缸和小臂液压缸均采用双液压缸控制;对上述技术方案做进一步的说明:所述液压执行系统通过三根高压软管沿坦克链、三个三通阀和高压油管连接到端梁的液压马达上,由液压马达驱动行走主动轮沿厂房两侧的固定轨道作南北行走,液压控制系统包括液压泵、循环泵、两个南北行走液压马达、换向阀、高压油污过滤继电器、液位超低报警器、温控开关和冷却风机、液位传感器、旋转轴承液压马达、小车液压马达、两个并联的大臂液压缸、两个并联的小臂液压缸、机械手臂液压缸、两个机械手液压缸和液压总分配器;对上述技术方案做进一步的说明:所述液压系统上设有液压总分配器,液压马达驱动旋转轴承的外齿圈实现三百六十度旋转;对上述技术方案做进一步的说明:所述液压执行系统的电气操控系统采用电气遥控操作;对上述技术方案做进一步的说明:所述电气操控系统中设有超低液位自动停机检测传感器和高低压滤油继电器,高压和低压回路压力超高报警提醒更换滤芯;对上述技术方案做进一步的说明:所述电气操控系统中设有保护机械联动机构的电气互锁和限位,保护机械联动机构和检修人员安全的包括平台门限位、南行走限位、北行走限位、小车左行限位和小车右行限位。
6.本实用新型具有降低能耗、改善现有的仓储物流和重工业生产中的设备安全性和
可靠性等特点。
附图说明
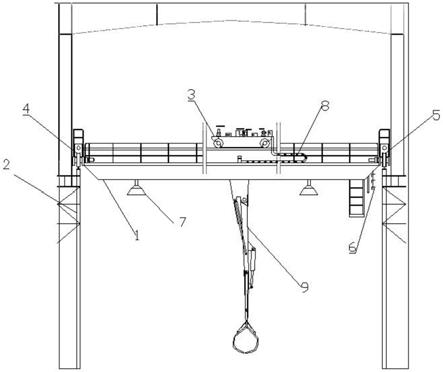
7.图1为机械臂式液压起重机结构原理图。
8.图2为箱梁俯视图。
9.图3小车主动轮左视图。
10.图4为l型机械臂主视图。
11.图5为油路总分配器结构图。
12.图6为液压控制原理图。
13.图7为主电路控制原理图。
14.图8为电气控制原理图一。
15.图9为遥控器控制原理图。
16.图10为电气控制原理图二。
17.图11为电气控制原理图三。
18.图12为电气控制原理图四。
19.图中:箱梁1、端梁2、小车3、小车主动轮4、南北行走主动轮5、导电拖板6、照明灯7、坦克链8、机械臂9、旋转轴承10、小车行走轨道11、小车主动轮12、缓冲器13、旋转轴承连接器14、大臂主销15、大臂防护裙16、大臂液压缸连接销17、小臂防护裙18、大小臂和机械手臂连接销19、小臂液压缸连接销20、小臂伸缩导轨21、机械手臂22、机械手臂销23、机械手销24、机械手25、大臂左右液压缸26、小臂左右液压缸27、机械手伸缩液压缸28、机械手液压缸29、机械手30、缓冲环31、进回油管接口32、密封圈33、抗磨环34、总分配器内腔35、防尘圈36、分配器内腔37和内腔固定座38。
具体实施方式
20.下面结合附图对本实用新型的内容做进一步的说明:
21.本设计有三部分组成:1.机械部分;2.液压执行系统;3.电气控制单元。1.机械部分包括:箱梁、端梁、缓冲器、两个南北行走主动轮及两个从动轮、旋转轴承、小车主动轮两个及两个从动轮、小车行走轨道、旋转轴承、旋转轴承连接器、黄油嘴、大臂主销、大臂、大臂防护裙、大臂液压缸销、大小臂与机械手臂连接销、小臂、小臂防护裙、小臂伸缩导轨、机械手臂、机械手臂销、机械手(机械手每侧有三个机械手指并联);
22.2.液压执行系统包括:油箱、油窗、磁铁、放油阀、过滤器、油温表、液位继电器、冷却器、油泵、循环泵、压力表、各路电磁换向阀、调节阀(节流阀)、溢流阀、软硬油管、顺序阀、旋转轴承液压马达、小车液压马达、大臂液压缸两个并联、小臂液压缸两个并联、机械手臂液压缸一个、机械手小液压缸两个、进油管路、进油过滤油污继电器、回油管路、回油过滤油污继电器、液压总分配器、南北行走液压马达两个,
23.3.电气控制单元包括:导电板、软连接网线、电源进线、电源总开关箱、总控制配电柜、隔离接触器、遥控接收器、塑料壳式断路器、微型断路器、交流接触器、温控器、超低液位报警器、超载限位器、中间继电器、灯、各路控制电磁阀、24v开关电源、散热风扇、油泵电机、循环油泵电机;
24.本机械臂式液压起重机的机械臂有z型臂和l型臂两款形式,用户可根据自己的需要来选择,本说明及控制电路为z型臂的控制方式和说明,l型臂的控制方式与z型臂的控制方式的主要区别是大臂升降,小臂不动,可独立操作。设计提升重量分三个级别,分别是5吨,10吨,16吨。两款机械臂的大小臂均采用双液压缸控制,在作业和运行时的安全稳定性好,具有故障率低,无摆动,无噪音,维护成本小的特点,只要按要求定期对相关连接轴套上的加油嘴加注润滑油保养润滑清理,生产运行时的性能会非常稳定,用户可根据现场的材料及物体的形状来更换机械钩、重力夹或液压长夹。
25.操控说明:
26.关好控制台门,合上电源开关,按下遥控器启动按钮,ka1得电自锁,隔离接触器吸合,ka1常开触点闭合,ka2得电自锁,循环泵启动,ka2常开触点闭合,液压泵得电运行,按下大臂上升键,小臂也升,按下大臂下降键,小臂也降,按下小臂升降键,大臂不动作。根据物料存放的位置,按下机械手臂伸或缩,对准要搬运的物体,按下机械手打开键,按下大臂下降键,机械手放在物料可抓的位置按下机械手合键,抓紧后,按下大臂上升键,上升到一定高度,按下向南行键,ka16得电,yv13电磁换向阀得电,同时ka19得电,yv15打开溢流阀,液压马达正转向南行走,运行到物体的存放点,按下左旋转键或右旋转键ka12或ka13得电常开触点闭合电磁换向阀得电,同时ka19得电yv15溢流阀打开放下物体,完成一个工作流程。
27.上述为本实用新型发明的原理说明,本发明不以任何方式限于上述实施例。相反,本发明的修改的许多可能性对本领域普通技术人员将显而易见,不脱离所附权利要求中限定的本发明的基本概念的情况下的修改均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1