一种上袋机器人取袋装置的制作方法
1.本实用新型属于面粉加工领域,具体涉及一种上袋机器人取袋装置。
背景技术:
2.在面粉灌装时,需要将叠落在一起的袋子单个分开输送至下道灌装工序中。现有的取袋装置一般采用粘黏头或者单一采用吸嘴直接在袋子层上进行取袋。粘黏头取袋需要对粘黏层进行频繁更换,费时费力。至单一采用吸嘴直接在多层袋子上吸附时,经常会出现多层袋子吸附粘黏的情况,严重影响生产效率。
技术实现要素:
3.为了解决现有技术的不足,本实用新型旨在提供一种上代机器人取袋装置,取袋准确高效,可有效防止多层袋子吸附粘黏。
4.为了实现上述目的,本实用新型采用的技术方案为:
5.一种上袋机器人取袋装置,包括送袋机构和抓袋机构,所述送袋机构包括移动滑台和拨袋机构,移动滑台安装在底座的左侧,拨袋机构包括通过动作机构垂直向下安装在移动滑台上方的第一刷辊;所述移动滑台右端设有凸台,凸台上的凹口内设有第二刷辊;所述凸台右侧的底座上设有与外部气源相连的吹风平台,与吹风平台右侧平齐的底座上设有与抓袋机构相配合托板,托板内设有检测袋子输送位置的位置传感器;所述抓袋机构包括通过第一伸缩杆向下垂直安装在托板上方的吸盘和夹爪气缸,夹爪气缸通过摆臂开口向左安装在与吸盘对应位置处。
6.优选地,所述动作机构包括动作机构包括垂直向下设置的动作气缸和弹簧,动作气缸的动作端上固定设有连接板,固定在连接板上的弹簧与第一刷辊相连。
7.优选地,所述凸台向上倾斜一定角度。
8.优选地,所述吹风平台上表面向右倾斜设有多个喷气孔。
9.优选地,所述托板右端设有固定设有限位挡板。
10.优选地,所述吸盘固定安装在活动板上,活动板的左侧铰接在第一伸缩杆的输出端上,活动板上方与第一伸缩杆之间设有第二伸缩杆。
11.本实用新型具有的有益效果为:
12.1.本实用新型动作气缸带动第一刷辊向下动作,逆时针转动的第一刷辊与移动滑台上放置的袋子表面相接触,通过第一刷辊的刷动配合弹簧的弹力抵触作用,即可将上层的袋子向右拨动。
13.2. 受第一刷辊拨动袋子向右动作,经过凸台时受凹口内第二刷辊的拨动可以将多余的袋子向左拨动,进而使单次只能有一张袋子送出移动滑台,进而有效解决了现有技术中容易出现多层袋子粘黏的问题。
14.3. 当袋子输送至托板处受限位挡板的限位而停止移动,位置传感器可对到位的袋子进行有效的检测,此时由抓袋机构动作将托板上的袋子抓起输送至下道工序中,通过
吹风平台可对袋子进行快速有效的输送。位置传感器、托板和限位挡板的配合,可对袋子的位置进行有效的定位与检测。
15.4. 通过两个气缸的配合能够带动吸盘向下动作将托板上的袋子吸附抓起,之后由摆臂带动夹爪气缸向左动作,进而将袋子的右侧加紧,即可通过摆臂动作将袋子拉动送向下道工序,整个操作快速高效,大大提高了取袋效率。
附图说明
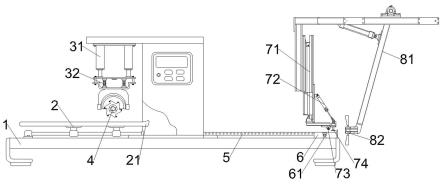
16.图1为本实用新型的结构示意图;
17.图2为本实用新型凸台的内部结构示意图。
具体实施方式
18.如1-2图所示,本实用新型提出了一种上袋机器人取袋装置,包括送袋机构和抓袋机构,送袋机构包括移动滑台2和拨袋机构,移动滑台2安装在底座1的左侧。需要人工补料时,底座1上的移动滑台2可向左滑出,方便工人将叠摞的袋子放置在滑台2上,补料操作十分便捷。
19.拨袋机构包括通过动作机构垂直向下安装在移动滑台2上方的第一刷辊4。动作机构包括动作机构包括垂直向下设置的动作气缸31和弹簧32,动作气缸31的动作端上固定设有连接板,固定在连接板上的弹簧32与第一刷辊4相连。动作气缸31带动第一刷辊4向下动作,逆时针转动的第一刷辊4与移动滑台2上放置的袋子表面相接触,通过第一刷辊4的刷动配合弹簧32的弹力抵触作用,即可将上层的袋子向右拨动。
20.移动滑台2右端设有向上倾斜一点角度的凸台21,凸台21上的凹口210内设有逆时针转动的第二刷辊22,受第一刷辊4拨动袋子向右动作,经过凸台21时受凹口210内第二刷辊22的拨动可以将多余的袋子向左拨动,进而使单次只能有一张袋子送出移动滑台2,进而有效解决了现有技术中容易出现多层袋子粘黏的问题。
21.凸台21右侧的底座1上设有与外部气源相连的吹风平台5,吹风平台5上表面向右倾斜设有多个喷气孔。经过拨袋机构筛下的袋子通过吹风平台5的鼓风悬浮推动可将袋子向右输送至限位挡板处。其中与吹风平台5右侧平齐的底座1上设有与抓袋机构相配合托板6,托板6内设有检测袋子输送位置的位置传感器61;托板6右端设有固定设有限位挡板。当袋子输送至托板6处受限位挡板的限位而停止移动,位置传感器61可对到位的袋子进行有效的检测,此时由抓袋机构动作将托板6上的袋子抓起输送至下道工序中,通过吹风平台5可对袋子进行快速有效的输送,位置传感器61、托板6和限位挡板的配合,可对袋子的位置进行有效的定位与检测。
22.抓袋机构包括通过第一伸缩杆71向下垂直安装在托板6上方的吸盘74和夹爪气缸82,其中吸盘74固定安装在活动板73上,活动板73的左侧铰接在第一伸缩杆71的输出端上,活动板73上方与第一伸缩杆71之间设有第二伸缩杆72。两个伸缩杆采用气缸结构,夹爪气缸82通过摆臂81开口向左安装在与吸盘74对应位置处。通过两个气缸的配合能够带动吸盘74向下动作将托板6上的袋子吸附抓起,之后由摆臂81带动夹爪气缸82向左动作,进而将袋子的右侧加紧,即可通过摆臂81动作将袋子拉动送向下道工序,整个操作快速高效,大大提高了取袋效率。
技术特征:
1.一种上袋机器人取袋装置,包括送袋机构和抓袋机构,其特征在于:所述送袋机构包括移动滑台和拨袋机构,移动滑台安装在底座的左侧,拨袋机构包括通过动作机构垂直向下安装在移动滑台上方的第一刷辊;所述移动滑台右端设有凸台,凸台上的凹口内设有第二刷辊;所述凸台右侧的底座上设有与外部气源相连的吹风平台,与吹风平台右侧平齐的底座上设有与抓袋机构相配合托板,托板内设有检测袋子输送位置的位置传感器;所述抓袋机构包括通过第一伸缩杆向下垂直安装在托板上方的吸盘和夹爪气缸,夹爪气缸通过摆臂开口向左安装在与吸盘对应位置处。2.根据权利要求1所述的上袋机器人取袋装置,其特征在于:所述动作机构包括动作机构包括垂直向下设置的动作气缸和弹簧,动作气缸的动作端上固定设有连接板,固定在连接板上的弹簧与第一刷辊相连。3.根据权利要求2所述的上袋机器人取袋装置,其特征在于:所述凸台向上倾斜一定角度。4.根据权利要求3所述的上袋机器人取袋装置,其特征在于:所述吹风平台上表面向右倾斜设有多个喷气孔。5.根据权利要求4所述的上袋机器人取袋装置,其特征在于:所述托板右端设有固定设有限位挡板。6.根据权利要求1所述的上袋机器人取袋装置,其特征在于:所述吸盘固定安装在活动板上,活动板的左侧铰接在第一伸缩杆的输出端上,活动板上方与第一伸缩杆之间设有第二伸缩杆。
技术总结
本实用新型公开了一种上袋机器人取袋装置,包括送袋机构和抓袋机构,所述送袋机构包括移动滑台和拨袋机构,移动滑台安装在底座的左侧,拨袋机构包括通过动作机构垂直向下安装在移动滑台上方的第一刷辊;所述移动滑台右端设有凸台,凸台上的凹口内设有第二刷辊;所述凸台右侧的底座上设有与外部气源相连的吹风平台,与吹风平台右侧平齐的底座上设有与抓袋机构相配合托板,托板内设有检测袋子输送位置的位置传感器;所述抓袋机构包括通过第一伸缩杆向下垂直安装在托板上方的吸盘和夹爪气缸,夹爪气缸通过摆臂开口向左安装在与吸盘对应位置处。本装置取袋准确高效,可有效防止多层袋子吸附粘黏。袋子吸附粘黏。袋子吸附粘黏。
技术研发人员:巩利萍 周利民 阮德志 赵显荣 贾真杰 赵立涛 赵立峰 王亚男
受保护的技术使用者:河南济开电器有限公司
技术研发日:2021.03.30
技术公布日:2022/6/30
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1