一种马桶夹抱装箱装置的制作方法
1.本实用新型涉及夹抱装箱装置技术领域,更具体地说,涉及一种马桶夹抱装箱装置。
背景技术:
2.智能马桶流水线生产中,在对马桶盖和陶瓷体对接后,陶瓷体和马桶盖上线接水,接上相应的配件检验冲水和翻盖,检测完后再用吹气管将水排净,后面再进行陶瓷体的抛光步骤,抛光步骤之后就可以对智能马桶进行打包操作。
3.现有的生产线中,通常采用人工操作的方式,通常在一个工位两侧安排两至三个操作工人,等待马桶贴标贴膜等操作完成后,将马桶抬起放入到箱子内进行打包,这种方式不仅浪费人力而且人工成本较高,不仅工作强度高,也大大降低了生产效率,因此本领域的专业人员提供了一种马桶夹抱装箱装置,已解决上述提到的问题。
技术实现要素:
4.针对现有技术中存在的问题,本实用新型的目的在于提供一种马桶夹抱装箱装置,以解决以往马桶装箱效率较慢的问题。
5.为解决上述问题,本实用新型采用如下的技术方案。
6.一种马桶夹抱装箱装置,包括传动装置一与传动装置二,所述传动装置一位于传动装置二的右侧,所述传动装置一与传动装置二之间的顶部固定连接有安装架,所述安装架的顶部开设有通槽,所述通槽的内壁上滑动连接有移动板,所述安装架的右侧固定安装有伺服电机,所述伺服电机的输出轴上固定连接有驱动轴,所述驱动轴的左端贯穿安装架并转动连接在通槽的内壁上,所述移动板螺纹连接在驱动轴上,所述移动板上固定安装有夹持装置。
7.作为上述技术方案的进一步描述:所述传动装置一的正面固定安装有控制面板,所述伺服电机与夹持装置均与控制面板之间电性连接。
8.作为上述技术方案的进一步描述:所述通槽的内壁上开设有两个滑槽,两个所述滑槽的内部均滑动连接有滑条,两个所述滑条相对的一侧均固定连接在移动板上。
9.作为上述技术方案的进一步描述:所述传动装置一上固定连接有限位条,所述限位条位于传动装置二的左侧。
10.作为上述技术方案的进一步描述:所述夹持装置包含有电动推杆,所述电动推杆固定安装在移动板上,所述电动推杆的底端贯穿并延伸至移动板的底部,所述电动推杆的底端固定安装有夹抱机构,所述夹抱机构的右侧固定安装有驱动机构,所述夹抱机构上固定安装有压力传感器,所述安装架的顶部固定安装有中央处理器与蜂鸣器,所述驱动机构、压力传感器与蜂鸣器均与中央处理器之间信号连接。
11.作为上述技术方案的进一步描述:所述夹抱机构上固定连接有两个防滑垫,所述防滑垫由橡胶材料制成。
12.相比于现有技术,本实用新型的优点在于:
13.(1)本方案,当需要对马桶进行装箱时,首先使用人员将马桶间隔放置在传动装置一上,随后在传动装置二上放置包装用纸箱,接着使用人员控制传动装置一将马桶移动到安装架底部,当需要对马桶进行夹抱时,使用人员控制夹持装置工作将马桶夹持,接着控制伺服电机通电工作,伺服电机通电后带动驱动轴同步转动,与驱动轴螺纹连接的移动板开始在通槽内部向左移动,当马桶移动到纸箱顶部后即可控制伺服电机停止工作,随后将夹持装置与马桶分离,即可对马桶进行装箱,此时控制伺服电机反向转动使得夹持装置复位,便可以对下一个马桶进行夹抱,以此来减少人员的投入提高马桶装箱的效率与质量。
14.(2)本方案,控制面板的设置可以使得使用人员更加简单快捷的操控此装置,以此减少人员的投入提高装箱效率。
15.(3)本方案,滑槽与滑条之间的配合使用可以对移动板起到支撑作用,同时还可以减少移动板与通槽内壁之间的摩擦。
16.(4)本方案,限位条的设置可以对传动装置一上的马桶起到限位作用,避免马桶在传动装置一脱落。
17.(5)本方案,当需要对传动装置一上的马桶进行夹持时,首先使用人员控制驱动机构通电工作,驱动机构通电后带动夹抱机构张开,接着使用人员控制电动推杆通电工作,电动推杆通电后带动夹抱机构向下移动直至马桶处于夹抱机构的内部,接着控制夹抱机构向马桶移动,当夹抱机构接触到马桶时压力传感器同时接触,压力传感器监测夹抱机构对马桶产生的力,当压力传感器监测到数值达到设定值后便会将信号传递给中央处理器,中央处理器接收后控制蜂鸣器发出提示声,此时夹抱机构将马桶夹紧并不会对马桶造成损坏,使用人员即可控制驱动机构停止工作并通过电动推杆将马桶提起,若使用人员没作出反应驱动机构继续对马桶加压,压力传感器监测到压力值达到峰值并将信号传递给中央处理器,中央处理器便会控制驱动机构断电,以此来完成对马桶的夹抱,加快装箱的效率与质量。
18.(6)本方案,防滑垫的设置可以增大夹抱机构与马桶之间的摩擦力,同时还可以避免夹抱机构与马桶之间直接接触对其造成磨损。
附图说明
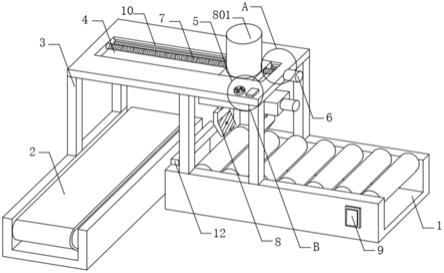
19.图1为本实用新型的立体结构示意图;
20.图2为本实用新型的图1中a处放大结构示意图;
21.图3为本实用新型的图1中b处放大结构示意图;
22.图4为本实用新型的夹抱机构立体结构示意图。
23.图中标号说明:
24.1、传动装置一;2、传动装置二;3、安装架;4、通槽;5、移动板;6、伺服电机;7、驱动轴;8、夹持装置;801、电动推杆;802、夹抱机构;803、驱动机构;804、压力传感器;805、中央处理器;806、蜂鸣器;9、控制面板;10、滑槽;11、滑条;12、限位条;13、防滑垫。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行
清楚、完整地描述;
26.请参阅图1~4,本实用新型中,一种马桶夹抱装箱装置,包括传动装置一1与传动装置二2,传动装置一1位于传动装置二2的右侧,传动装置一1与传动装置二2之间的顶部固定连接有安装架3,安装架3的顶部开设有通槽4,通槽4的内壁上滑动连接有移动板5,安装架3的右侧固定安装有伺服电机6,伺服电机6的输出轴上固定连接有驱动轴7,驱动轴7的左端贯穿安装架3并转动连接在通槽4的内壁上,移动板5螺纹连接在驱动轴7上,移动板5上固定安装有夹持装置8。
27.本实用新型中,当需要对马桶进行装箱时,首先使用人员将马桶间隔放置在传动装置一1上,随后在传动装置二2上放置包装用纸箱,接着使用人员控制传动装置一1将马桶移动到安装架3底部,当需要对马桶进行夹抱时,使用人员控制夹持装置8工作将马桶夹持,接着控制伺服电机6通电工作,伺服电机6通电后带动驱动轴7同步转动,与驱动轴7螺纹连接的移动板5开始在通槽4内部向左移动,当马桶移动到纸箱顶部后即可控制伺服电机6停止工作,随后将夹持装置8与马桶分离,即可对马桶进行装箱,此时控制伺服电机6反向转动使得夹持装置8复位,便可以对下一个马桶进行夹抱,以此来减少人员的投入提高马桶装箱的效率与质量。
28.请参阅图1,其中:传动装置一1的正面固定安装有控制面板9,伺服电机6与夹持装置8均与控制面板9之间电性连接。
29.本实用新型中,控制面板9的设置可以使得使用人员更加简单快捷的操控此装置,以此减少人员的投入提高装箱效率。
30.请参阅图1与图2,其中:通槽4的内壁上开设有两个滑槽10,两个滑槽10的内部均滑动连接有滑条11,两个滑条11相对的一侧均固定连接在移动板5上。
31.本实用新型中,滑槽10与滑条11之间的配合使用可以对移动板5起到支撑作用,同时还可以减少移动板5与通槽4内壁之间的摩擦。
32.请参阅图1,其中:传动装置一1上固定连接有限位条12,限位条12位于传动装置二2的左侧。
33.本实用新型中,限位条12的设置可以对传动装置一1上的马桶起到限位作用,避免马桶在传动装置一1脱落。
34.请参阅图1~4,其中:夹持装置8包含有电动推杆801,电动推杆801固定安装在移动板5上,电动推杆801的底端贯穿并延伸至移动板5的底部,电动推杆801的底端固定安装有夹抱机构802,夹抱机构802的右侧固定安装有驱动机构803,夹抱机构802上固定安装有压力传感器804,安装架3的顶部固定安装有中央处理器805与蜂鸣器806,驱动机构803、压力传感器804与蜂鸣器806均与中央处理器805之间信号连接。
35.本实用新型中,当需要对传动装置一1上的马桶进行夹持时,首先使用人员控制驱动机构803通电工作,驱动机构803通电后带动夹抱机构802张开,接着使用人员控制电动推杆801通电工作,电动推杆801通电后带动夹抱机构802向下移动直至马桶处于夹抱机构802的内部,接着控制夹抱机构802向马桶移动,当夹抱机构802接触到马桶时压力传感器804同时接触,压力传感器804监测夹抱机构802对马桶产生的力,当压力传感器804监测到数值达到设定值后便会将信号传递给中央处理器805,中央处理器805接收后控制蜂鸣器806发出提示声,此时夹抱机构802将马桶夹紧并不会对马桶造成损坏,使用人员即可控制驱动机构
803停止工作并通过电动推杆801将马桶提起,若使用人员没作出反应驱动机构803继续对马桶加压,压力传感器804监测到压力值达到峰值并将信号传递给中央处理器805,中央处理器805便会控制驱动机构803断电,以此来完成对马桶的夹抱,加快装箱的效率与质量。
36.请参阅图1与图4,其中:夹抱机构802上固定连接有两个防滑垫13,防滑垫13由橡胶材料制成。
37.本实用新型中,防滑垫13的设置可以增大夹抱机构802与马桶之间的摩擦力,同时还可以避免夹抱机构802与马桶之间直接接触对其造成磨损。
38.本方案中,伺服电机6的型号可为110st
‑
m04030;电动推杆801的型号可为dytp
‑
3000;中央处理器805的型号可为e5
‑
2690。
39.工作原理:当需要对马桶进行装箱时,首先使用人员将马桶间隔放置在传动装置一1上,随后在传动装置二2上放置包装用纸箱,接着使用人员控制传动装置一1将马桶移动到安装架3底部,当需要对传动装置一1上的马桶进行夹持时,首先使用人员控制驱动机构803通电工作,驱动机构803通电后带动夹抱机构802张开,接着使用人员控制电动推杆801通电工作,电动推杆801通电后带动夹抱机构802向下移动直至马桶处于夹抱机构802的内部,接着控制夹抱机构802向马桶移动,当夹抱机构802接触到马桶时压力传感器804同时接触,压力传感器804监测夹抱机构802对马桶产生的力,当压力传感器804监测到数值达到设定值后便会将信号传递给中央处理器805,中央处理器805接收后控制蜂鸣器806发出提示声,此时夹抱机构802将马桶夹紧并不会对马桶造成损坏,使用人员即可控制驱动机构803停止工作并通过电动推杆801将马桶提起,若使用人员没作出反应驱动机构803继续对马桶加压,压力传感器804监测到压力值达到峰值并将信号传递给中央处理器805,中央处理器805便会控制驱动机构803断电,以此来完成对马桶的夹抱,加快装箱的效率与质量,接着控制伺服电机6通电工作,伺服电机6通电后带动驱动轴7同步转动,与驱动轴7螺纹连接的移动板5开始在通槽4内部向左移动,当马桶移动到纸箱顶部后即可控制伺服电机6停止工作,随后将夹持装置8与马桶分离,即可对马桶进行装箱,此时控制伺服电机6反向转动使得夹持装置8复位,便可以对下一个马桶进行夹抱,以此来减少人员的投入提高马桶装箱的效率与质量。
40.以上所述,仅为本实用新型较佳的具体实施方式;但本实用新型的保护范围并不局限于此。任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其改进构思加以等同替换或改变,都应涵盖在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1