一种结合BIM技术的群塔工作协调器的制作方法
一种结合bim技术的群塔工作协调器
技术领域
1.本实用新型涉及建筑施工技术领域,具体涉及一种结合bim技术的群塔工作协调器。
背景技术:
2.塔式起重机,亦称塔吊,在世界各地的建筑工程中得到了广泛的应用。塔吊的布置是平面布置规划的一项重要任务,其位置的优化取决于许多相互关联的因素,包括场地约束、建筑物的形状和尺寸、所需材料的类型和数量、塔吊的配置、塔吊的类型和施工现场的布局等。这些因素也因项目而异,特别在一些大型的施工环境下,所需的塔吊数量较多,不仅布置方案更为复杂,而且在工作中也会发生因各个塔吊之间协调不畅,导致塔吊臂旋转过程中相互碰撞,或者与相邻的建筑物以及外脚手架碰撞,甚至在顶升阶段与相邻的塔吊碰撞的问题。不仅会极大地影响工期,而且还会对塔吊造成损伤,严重时会对施工区域下的工人们造成极大的安全威胁。
3.现有的操作方式是,白天施工时,相邻两塔间依靠可视系统和限位报警系统以及指挥信号工指挥相互提示,以错开材料吊放区域和错开吊放时间。夜晚施工时,在每台塔吊吊臂前端、塔身塔尖、吊臂后端各安装一个警示灯,以提高夜间作业各塔之间安全系数。除每个塔吊配备专职指挥员外,并在多个区域各配备一名总协调员,统筹监管各个塔吊的吊放区域,以保证相邻两塔间满足安全距离。此种方式虽然安全性高,但是用人成本以及设备使用成本也较高,而且通过人眼判断有时也有错误判断的可能,虽然不会造成安全事故,但是会影响工程进度和施工效率。
技术实现要素:
4.本实用新型要解决的技术问题是提供一种群塔工作协调器,通过简单的安装结构以及成本较低的传感器,能够做到实时监测多个塔吊的运行,以避免多个塔吊在工作时出现碰撞。
5.基于上述问题,本实用新型提出的技术方案是提供一种结合bim技术的群塔工作协调器,包括固定在塔吊臂悬臂头一端的连接架、固定在连接架上的gps传感器和激光测距仪,所述gps和激光测距仪外侧均连接保护罩。
6.还包括控制单元,所述控制单元为电脑和可编程控制器,所述gps传感器和激光测距仪与控制单元电性连接。
7.其中,所述连接架包括插架和支板,插架为倒u形结构,所述支板垂直固接在所述插架一侧,所述支板与插架一体铣削制成。
8.进一步的,所述插架长度大于塔吊臂底部杆件竖直方向长度,插架插接在塔吊臂上,插架伸出塔吊臂的两端插接有紧固螺钉并通过紧定螺母固定。
9.进一步的,gps传感器外侧固接gps罩,所述gps罩固定在所述插架顶部,激光测距仪外侧固接测距仪罩,激光测距仪通过螺栓固定在所述支板上,测距仪罩覆盖在所述支板
的顶部、侧壁和底部。
10.进一步的,所述插架与支板相接处铣削有圆角槽,测距仪罩与插架相接端也铣削有相配合得圆角槽,所述圆角槽半径为10~30mm。
11.进一步的,测距仪罩底部开设有圆形信号孔,所述信号孔内镶嵌有平面镜。
12.进一步的,gps罩一侧和测距仪罩顶部均固连有线管,线管内穿有电源线和数据线,所述电源线和数据线均与gps传感器和激光测距仪电性连接。
13.进一步的,所述线管外端口处固连有弯角为120
°
的弯头,所述弯头出口端指向塔吊臂底部。
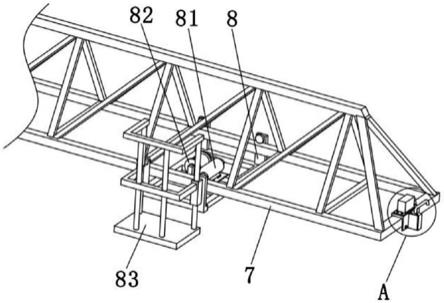
14.其中,塔吊臂上滑动连接有行车,所述行车上设有电机81和绞盘82,所述绞盘上固连有编码器,编码器与电脑电性连接。
15.其中,所述激光测距仪选用tf350型激光测距模块,最大检测距离为350m,检测精度为10m。
16.本实用新型的优点和有益效果:
17.本实用新型通过在塔吊臂的头部安装协调器,仅利用两三个传感器结合bim技术即可对多个塔吊的工作过程进行实时监测,并能对塔吊臂的运行过程进行预判,一旦发现有碰撞风险,立即向塔吊司机报警,改变塔吊当前的工作模式或者直接停机等待调配,避免事故的发生。
18.结合bim技术能够将塔吊臂的运行位置具象化,还可将实时测量的点位图生成轨迹图,连同施工区域的以及周围环境的平面图通过无线信息传输至塔吊司机处以及监管部门处,无需过多的监测人员在现场即可实现监管。
19.相比现有的调配方式,采用的人力大大减少,而且通过程序进行调配准确性高,此外还能通过程序调配各个塔吊的工作流程,降低塔吊因防碰撞而停机的次数以及时间,使施工效率有所提升。
附图说明
20.图1是本实用新型的安装位置图;
21.图2是图1中a的放大图;
22.图3是本实用新型的侧视图;
23.图4是本实用新型的仰视图;
24.图5是本实用新型的编码器安装位置图;
25.图6是本实用新型的测距仪罩截面图;
26.图7是本实用新型的激光测距仪安装位置图。
27.其中:1、连接架;11、插架;12、支板;13、紧固螺钉;2、gps罩;3、测距仪罩;31、信号孔;4、激光测距仪;5、编码器;6、线管;61、弯头;7、塔吊臂;8、行车;81、电机;82、绞盘;83、检修座。
具体实施方式
28.下面结合附图对本实用新型的具体实施方式作详细说明。
29.如图1
‑
图7所示,本实用新型提供了一种群塔工作协调器,包括固定在塔吊臂7悬
臂头一端的连接架1、固定在连接架1上的gps传感器和激光测距仪4,所述gps和激光测距仪4外侧均连接保护罩,还包括控制单元,所述控制单元为电脑和基于电脑的可编程控制器,所述gps传感器和激光测距仪4与控制单元电性连接。
30.其中,连接架1通过紧固螺钉13固定在塔吊臂7上,利用过盈配合使连接架1稳定固定在塔吊臂7上,避免在塔吊臂7上钻孔对塔吊造成损伤,保持塔吊臂7的完整性。其中,所述连接架1包括插架11和支板12,插架11为倒u形结构,所述支板12垂直固接在所述插架11一侧,所述支板12与插架11一体铣削制成。支板12为方形铝块,支板12长度方向与插架11侧面垂直,支板12一端固连在插架11一侧,优选地,插架11和支板12使用同一铝块一体铣削制成,使用数控机床进行铣削,可保证支板12端面与插架11侧面保持垂直,同时保证支板12端面与插架11顶部端面垂直,有效避免将支板12焊接在插架11上时的定位误差。
31.gps传感器外侧固接gps罩2,所述gps罩2固定在所述插架11顶部,激光测距仪4外侧固接测距仪罩3,激光测距仪4通过螺栓固定在所述支板12上,测距仪罩3覆盖在所述支板12的顶部、侧壁和底部。所述插架11与支板12相接处铣削有圆角槽,测距仪罩3与插架11相接端也铣削有相配合得圆角槽,所述圆角槽半径为10~30mm。因铣刀旋转切削导致插架11与支架相接端会出现加工圆角,忽略该圆角则会使测距仪罩3不能完全盖合支架。如果要使插架11与支架相接端保持垂直,则需要调整连接架1方位或者使用更高自由度的铣床,但调整方位费工时,使用高自由度的铣床成本较高,因此直接设计更大角度的圆角槽,既能使测距仪罩3与支架完全贴合,也不用移动连接架1,更不用使用高自由度的铣床,使得连接架1的加工成本大大降低。
32.gps罩2可为环氧树脂壳体或其他带有法兰的塑料壳体,插架11顶端面开设有螺纹孔,gps传感器可选用zw08
‑
obd型gps定位器,其定位精度可达1m。gps传感器通过螺栓固定在插架1111或gps罩上,gps罩2通过螺栓固定在插架11上,设置gps罩2避免gps传感器收到雨水或风力侵蚀,保障gps传感器能够长时间正常工作。gps罩选用非金属材料制成,可减少金属材料对信号的干扰。
33.测距仪罩3为铝块铣削而成的方形金属盖,测距仪罩3的大小与支板12大小相同,以使测距仪罩3可扣接在支板12上,激光测距仪4选用tf350型激光测距模块,其最大检测距离为350m,检测精度为10m,可对多数建筑高度进行检测。激光测距仪4通过螺栓固连在支板12上,测距仪罩3套接在激光测距仪4外,测距仪罩3覆盖在支板12顶部侧壁和底部,可避免激光测距仪4收到雨水或风力侵蚀。测距仪罩3顶部覆盖在支板12顶部,测距仪罩3顶部通过螺栓与支板12固连,安全方便快捷,且能使测距仪罩3与支板12稳定固定。测距仪罩3底部开设有圆形的信号孔31,信号孔31内镶嵌有平面镜,能使激光信号透过测距仪罩3发射以及接收。
34.进一步的,gps罩2一侧和测距仪罩3顶部均固连有线管6,线管6内穿有电源线和数据线,所述电源线和数据线均与gps传感器和激光测距仪4电性连接。设置线管6既能避免gps罩2和测距仪罩3内进水,又能起到引导电线的作用,避免线束散乱的问题。所述线管6外端口处固连有弯角为120
°
的弯头61,所述弯头61出口端指向塔吊臂7底部。以进一步引导线束至塔吊臂7上,并通过束带将线束绑缚在塔吊臂7上,避免线束在风力作用来来回摇摆而被扯断的风险,同时减少线束在风力摆动下与线管6端口的摩擦,相比不添加弯头61的线管6,更不易将管口将线束磨断,提高线束使用寿命。
35.其中,gps传感器可选用zw08
‑
obd型gps定位器,其定位精度可达1m,所述激光测距仪4选用tf350型激光测距模块,最大检测距离为350m,检测精度为10m。实时将塔吊臂7运动位置的数据进行记录,通过可编程控制器计算塔吊臂7相较于前段时间是否有伸长或缩短,同时结合bim技术,能够得知塔吊臂7是否运动到了和其他塔吊重合的工作区域,同时能根据其他塔吊臂7的运动轨迹对其他塔吊的运动位置进行预判。如果多个塔吊均向重合的工作区域移动,则通过电脑向尚未进入工作区域的塔吊报警,减缓移动速度或直接停机,等待先行进入的塔吊在工作并离开后再行进入,相比肉眼的判断,其监测精度更高更准确。设置激光测距仪4能够辅助gps传感器判断是否已进入施工区域,因激光测距仪4检测精度在10m左右,而且在建筑高度在10m以下时,完全可凭肉眼进行判断,无需打开激光测距仪4,待建筑高度与地面之间差值超过10m之后,则开启激光测距仪4对gps传感器进行辅助判断,弥补因信号传输时间或传感器检测精度的问题导致塔吊臂7已进入施工区域但是图像上还未显示的问题,此时激光测距仪4可通过当下检测距离的差值明确塔吊臂7以进入施工区域,通过程序立刻对图像轨迹以及点位进行调整,确保运输安全。
36.塔吊臂7上滑动连接有行车8,所述行车8上设有电机81和绞盘82,所述绞盘82上固连有编码器5,编码器5与控制单元电性连接,用于控制行车8在塔吊臂7上的运动,编码器5用于收集绞盘82的转动圈数,结合缆绳围绕绞盘82一圈的长度,即可计算出行车8的移动距离,进而可明确了解货物运送位置。行车8一侧还焊接有检修座83,用于工人能够安全的站立在行车8一侧,当连接架1上的各个电学部件出现故障时,可通过行车8和检修座83将工人送至连接架1处进行更换。以上对本实用新型的一个实施例进行了详细说明,但所述内容仅为本实用新型的较佳实施例,不能被认为用于限定本实用新型的实施范围。凡依本实用新型申请范围所作的均等变化与改进等,均应仍归属于本实用新型的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1