山楂木、果丹皮揭片用随动接料装置的制作方法
1.本实用新型涉及山楂木、果丹皮食品生产技术领域,尤其涉及一种山楂木、果丹皮揭片用随动接料装置。
背景技术:
2.山楂木、果丹皮是用山楂等果类制成的食品,深受人民的喜爱,生产过程涉及到洗果、打浆、刮片、烘烤、揭片、晾晒、包装等生产环节,并且其间一般需要将山楂木、果丹皮的中间物多次移动。现有技术中,一般采用自动刮片机进行自动刮片,空置的玻璃料板由输送线输送至刮浆工位,由刮浆机自动刮浆,使得玻璃料板上涂满浆料,涂满的浆料的玻璃料板被输送至输送线的一端,然后由推拉升降装置移动至玻璃料车,进入烤房进行烘烤,烘烤完成后玻璃料板上形成浆片,推拉升降装置将玻璃料板输送至输送线的另一端,然后再通过输送线继续输送至揭片工位进行揭片,揭片完成后空置的玻璃料板继续由输送线输送至刮浆工位,以此循环作业。目前,主要是人工在揭片工位进行揭片,采用此种人工操作,存在着效率低、操作慢等缺点,无法实现快速高效的自动化生产。
3.为了实现山楂木、果丹皮的自动揭片,发明人在揭片工位处设计一种自动揭片装置,该自动揭片装置包括取料输送装置和随动接料装置,其中随动接料装置作为山楂木、果丹皮揭片用随动接料装置,为本实用新型技术问题的发明创造点,取料输送装置夹持携带有浆片的玻璃料板运动至随动接料装置处时,将玻璃料板上的浆片剥离下来并承接。
技术实现要素:
4.本实用新型所要解决的技术问题是提供一种结构简单,效率高,可自动将浆片剥离且承接浆片的山楂木、果丹皮揭片用随动接料装置。
5.为解决上述技术问题,本实用新型的技术方案是:山楂木、果丹皮揭片用随动接料装置,包括对应设置在输送线剥离工位处用于将玻璃料板上携带的浆片剥离掉的浆片剥离装置,所述浆片剥离装置的下方对应设置有随动接料装置,所述随动接料装置包括随动接料安装架,所述随动接料安装架上安装有用于承接剥离后浆片的成品接料托盘。
6.作为优选的技术方案,所述浆片剥离装置包括横跨所述输送线上方的刮刀安装架,所述刮刀安装架上安装有用于将玻璃料板上浆片剥离掉的浆片刮刀。
7.作为优选的技术方案,所述浆片刮刀的刀刃向上倾斜设置且倾斜方向与所述玻璃料板上浆片运动方向相反,所述浆片刮刀与所述刮刀安装架之间还设置有刮刀浮动装置。
8.作为优选的技术方案,所述刮刀浮动装置包括固定在所述浆片刮刀两端的刮刀转轴,所述刮刀转轴转动安装在所述刮刀安装架上,所述浆片刮刀与所述刮刀安装架之间的所述刮刀转轴外套装有浮动扭簧。
9.作为优选的技术方案,所述成品接料托盘的底端设置有在剥离初始位置与剥离结束位置之间运动用于跟随剥离后浆片进行同步接料的托盘行走装置,所述托盘行走装置安装在所述随动接料安装架上,所述成品接料托盘上还安装有驱动所述成品接料托盘在所述
剥离初始位置与剥离结束位置之间进行往复运动的往复驱动装置。
10.作为优选的技术方案,所述往复驱动装置包括安装在所述成品接料托盘上的定位随动装置,所述定位随动装置可使得所述成品接料托盘沿所述托盘行走装置由剥离初始位置运动至剥离结束位置,所述随动接料安装架与所述成品接料托盘之间还设置有托盘复位装置,所述托盘复位装置使得所述成品接料托盘沿所述托盘行走装置由剥离结束位置运动至剥离初始位置。
11.作为优选的技术方案,所述定位随动装置包括安装在所述成品接料托盘上的定位支架,所述定位支架上设置有定位销孔。
12.作为优选的技术方案,所述托盘复位装置为托盘复位气缸,所述托盘复位气缸的缸体固定在所述随动接料安装架上,所述托盘复位气缸的缸杆与所述成品接料托盘的端部配合。
13.作为优选的技术方案,所述托盘行走装置包括固定安装的托盘行走滑轨,所述成品接料托盘的底端安装有沿所述托盘行走滑轨行走的托盘行走轮。
14.由于采用了上述技术方案,山楂木、果丹皮揭片用随动接料装置,包括对应设置在输送线剥离工位处用于将玻璃料板上携带的浆片剥离掉的浆片剥离装置,所述浆片剥离装置的下方对应设置有随动接料装置,所述随动接料装置包括随动接料安装架,所述随动接料安装架上安装有用于承接剥离后浆片的成品接料托盘;
15.本实用新型的有益效果是:本实用新型中设置所述浆片剥离装置,用于将所述料板夹取翻转装置携带的玻璃料板上的浆片剥离,通过两者的相对运动,将浆片自动剥离,结构简单、操作方便、效率高;并设置所述随动接料装置,通过所述定位随动装置来实现随动同步接料的过程,保证浆片可以平整铺满在成品接料托盘上,避免在成品接料托盘上出现堆叠等现象影响到浆片成品质量。
附图说明
16.以下附图仅旨在于对本实用新型做示意性说明和解释,并不限定本实用新型的范围。其中:
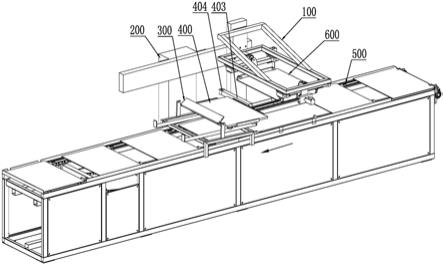
17.图1是本实用新型实施例山楂木、果丹皮自动揭片装置安装在输送线的布置效果图;
18.图2是图1的侧视图;
19.图3是本实用新型实施例的结构示意图;
20.图4是本实用新型实施例另一角度的结构示意图;
21.图中:100
‑
料板夹取翻转装置;101
‑
升降固定框架;102
‑
夹取导向滑轨;103
‑
夹取安装架;104
‑
开合驱动气缸;105
‑
旋转驱动气缸;106
‑
料板卡爪安装座;107
‑
料板夹取卡爪;108
‑
安装座转轴;200
‑
料板往复输送装置;201
‑
料板输送架体;300
‑
浆片剥离装置;301
‑
刮刀安装架;302
‑
浆片刮刀;400
‑
随动接料装置;401
‑
随动接料安装架;402
‑
成品接料托盘;403
‑
定位支架;404
‑
定位销孔;405
‑
定位销柱;406
‑
托盘行走滑轨;407
‑
托盘行走轮;500
‑
输送线;600
‑
玻璃料板。
具体实施方式
22.下面结合附图和实施例,进一步阐述本实用新型。在下面的详细描述中,只通过说明的方式描述了本实用新型的某些示范性实施例。毋庸置疑,本领域的普通技术人员可以认识到,在不偏离本实用新型的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,附图和描述在本质上是说明性的,而不是用于限制权利要求的保护范围。
23.如图1至图4所示,山楂木、果丹皮自动揭片装置,对应设置在输送线500的揭片工位处,所述揭片工位处对应设置有夹取工位与剥离工位,包括山楂木、果丹皮揭片用取料输送装置和山楂木、果丹皮揭片用随动接料装置。山楂木、果丹皮揭片用取料输送装置包括料板夹取翻转装置100和料板往复输送装置200,所述料板夹取翻转装置100对应设置在所述夹取工位,用于将所述输送线500上携带有浆片的玻璃料板600夹取后并水平翻转;所述料板夹取翻转装置100安装在所述料板往复输送装置200上,所述料板往复输送装置200可携带所述料板夹取翻转装置100竖直上升与下降,且可在所述夹取工位与所述剥离工位之间往复水平运动。山楂木、果丹皮揭片用随动接料装置为本实用新型所要保护的技术方案,包括浆片剥离装置300和随动接料装置400,所述浆片剥离装置300对应设置在所述剥离工位,与运动至所述剥离工位处的所述料板夹取翻转装置100配合,用于将所述料板夹取翻转装置100携带的玻璃料板600上的浆片剥离;所述随动接料装置400对应设置在所述浆片剥离装置300的下方,与运动至所述剥离工位处的所述料板夹取翻转装置100配合,用于承接剥离后的浆片。
24.本实施例自动揭片时的工作过程为:
25.携带有烘干后浆片的玻璃料板600被所述输送线500输送至所述夹取工位时停止准备自动揭片时,此时所述料板往复输送装置200动作,水平运动至所述夹取工位,即带动着所述料板夹取翻转装置100水平运动至所述夹取工位,同时所述料板往复输送装置200继续动作,带动所述料板夹取翻转装置100下降,使得所述料板夹取翻转装置100下降刚好位于待夹取的玻璃料板600的上方,然后所述料板夹取翻转装置100开合动作,将位于所述输送线500上待揭片的玻璃料板600夹取,然后所述料板往复输送装置200带动所述料板夹取翻转装置100上升,即待揭片的玻璃料板600上升至一定高度后,此时浆片位于玻璃料板600的上方,当高度达到后,所述料板夹取翻转装置100水平翻转180
°
,即使得玻璃料板600翻转180
°
,此时浆片位于玻璃料板600的下方且粘附在玻璃料板600上,此时玻璃料板600的夹取与水平翻转完成;
26.接着所述料板往复输送装置200朝向所述剥离工位一侧水平运动,即由所述夹取工位运动至所述剥离工位,即带动玻璃料板600由所述夹取工位运动至所述剥离工位,当所述料板夹取翻转装置100运动至所述剥离工位后,所述料板往复输送装置200开始下降运动,直到玻璃料板600接触到位于剥离工位处的所述浆片剥离装置300高度停止,此时所述浆片剥离装置300接触到玻璃料板600的端部边缘准备进行浆片剥离,同时所述料板往复输送装置200继续朝向所述剥离工位一侧水平运动,随着玻璃料板600的不断运动,所述浆片剥离装置300不断将玻璃料板600上的浆片剥离下来,直到浆片全部剥离下时所述料板往复输送装置200停止运动;在浆片剥离下料过程中,所述随动接料装置400承接剥离后的浆片,然后剥离下来的成品由操作人员取下即可;
27.剥离完成后,所述料板往复输送装置200动作带动所述料板往复输送装置200上升至一定高度并朝向所述夹取工位一侧运动,运动至所述夹取工位后,所述料板往复输送装置200反向水平翻转180
°
,使得玻璃料板600的正面朝上,然后所述料板往复输送装置200带动所述料板往复输送装置200下降,并进行开合动作将玻璃料板600放回至所述输送线500的原位置,等待下一待揭片的玻璃料板600到达所述夹取工位,重复上述动作循环作业。
28.自动揭片装置将揭片动作分解成夹取、输送、剥离、接料等多个步骤,多个步骤之间有序、连续进行,实现了自动揭片过程,操作简单,效率高,可实现快速高效的自动化生产,填补了行业内的空白,市场价值较广。
29.所述料板往复输送装置200包括安装在所述输送线500一侧的料板输送架体201,所述料板输送架体201上安装有在所述夹取工位与所述剥离工位之间往复水平运动的水平输送驱动装置,所述水平输送驱动装置上还安装有可竖直上升与下降的竖直升降驱动装置,所述料板夹取翻转装置100安装在所述竖直升降驱动装置上。所述水平输送驱动装置包括安装在所述料板输送架体201上的水平输送滑轨,所述水平输送滑轨上对应安装有水平滑轨座,所述竖直升降驱动装置包括竖直升降立柱,所述竖直升降立柱的底端固定在所述水平滑轨座上,所述料板输送架体201上还安装有水平驱动螺杆,所述水平滑轨座还与所述水平驱动螺杆螺纹连接,所述水平驱动螺杆的一端安装有水平驱动电机,当所述水平驱动电机转动时,带动所述水平驱动螺杆转动,从而使得所述水平滑轨座沿着所述水平输送滑轨水平滑动,即带动所述竖直升降立柱以及安装在所述竖直升降立柱上的部件均实现水平运动;所述竖直升降立柱上设置有竖直升降滑轨,所述竖直升降滑轨上对应设置有竖直升降滑轨座,所述料板夹取翻转装置100安装在所述竖直升降滑轨座上,所述竖直升降立柱上还安装有竖直驱动螺杆,所述竖直升降滑轨座还与所述竖直升降立柱螺纹连接,所述竖直驱动螺栓的顶端安装有竖直驱动电机,当所述竖直驱动电机转动时,带动所述竖直驱动螺杆转动,从而使得所述竖直升降滑轨座沿着所述竖直升降滑轨上升与下降,即带动所述料板夹取翻转装置100实现竖直升降运动。当然所述水平输送驱动装置和所述竖直升降驱动装置还可以通过链条与链轮配合实现驱动,为本领域普通工程技术人员所公知的,在此不再赘述。所述水平输送驱动装置与竖直升降驱动装置的具体结构未在图中示出。
30.所述料板夹取翻转装置100包括安装在所述料板往复输送装置200上的升降固定框架101,所述升降固定框架101作为所述料板夹取翻转装置100的安装基体,具体为水平设置的框架结构,一侧固定在所述料板往复输送装置200上,可以随着所述料板往复输送装置200水平运动与竖直升降,所述升降固定框架101上位于所述输送线500的两侧分别安装有相互配合夹持所述玻璃料板600的料板卡爪装置,两所述料板卡爪装置与所述升降固定框架101之间分别设置有卡爪开合装置,所述卡爪开合装置上还设置有与所述料板卡爪装置连接用于驱动所述料板卡爪装置水平翻转的料板翻转装置。本实施例中设置有两所述料板卡爪装置,分别设置在所述输送线500的两侧,用于分别夹持玻璃料板600的两侧,两所述料板卡爪装置分别设置有一卡爪开合装置,两所述卡爪开合装置的结构相同且对称设置,用于同步动作,配合实现两所述料板卡爪装置的同步张开与同步合并,同时设置有两所述料板翻转装置,两所述料板翻转装置的结构相同且对称设置,用于同步动作,一起配合实现所述料板卡爪装置的水平翻转。
31.所述卡爪开合装置包括安装在所述升降固定框架101上的夹取导向滑轨102,所述
夹取导向滑轨102设置在所述升降固定框架101的底端,且设置有两根,所述夹取导向滑轨102的滑动方向与所述输送线500的输送方向垂直,所述夹取导向滑轨102上滑动安装有夹取安装架103,所述料板翻转装置和所述料板卡爪装置均安装在所述夹取安装架103上,所述升降固定框架101与所述夹取安装架103之间安装有驱动所述夹取安装架103沿所述夹取导向滑轨102滑动的开合驱动装置。所述开合驱动装置为开合驱动气缸104,所述开合驱动气缸104的缸体端固定在所述升降固定框架101上,所述夹取安装架103固定连接在所述开合驱动气缸104的缸杆端。所述开合驱动气缸104的缸杆端伸出或缩短时,推动所述夹取安装架103,使得所述夹取安装架103沿着所述夹取导向滑轨102滑动,从而使得安装在其上的所述料板翻转装置以及所述料板卡爪装置滑动,实现所述料板卡爪装置的张开与合并。
32.所述料板翻转装置包括缸体固定在所述夹取安装架103上的旋转驱动气缸105,所述旋转驱动气缸105的转轴端与所述料板夹取装置固定连接。所述旋转驱动气缸105安装在所述夹取安装架103上,因此可以随着所述夹取安装架103滑动实现张开与合并,当所述夹取安装架103张开与合并时,带动所述料板翻转装置一起张开与合并。由于所述料板夹取装置的端部固定在所述旋转驱动气缸105的转轴端,因此当所述旋转驱动气缸105的转轴端旋转时,会带动所述料板夹取装置跟随旋转,实现所述料板夹取装置水平翻转180
°
的过程。所述旋转驱动气缸105为现有设计中的旋转气缸,属于本领域普通工程技术人员所公知的,其具体结构在此不再赘述。在本实施例中,所述旋转驱动气缸105的转动角度是0
‑
180
°
,即正转180
°
和反转180
°
,实现水平翻转和复位。
33.所述料板卡爪装置包括固定安装在所述料板翻转装置上的料板卡爪安装座106,所述料板卡爪安装座106上布置有用于夹取所述玻璃料板600的料板夹取卡爪107,所述料板夹取卡爪107上设置用用于卡放玻璃料板600的v型槽结构。所述料板卡爪安装座106的外侧表面的中部固定安装有安装座转轴108,所述安装座转轴108与所述旋转驱动气缸105的转轴端固定连接,即当所述旋转驱动气缸105的转轴端转动时,带动所述安装座转轴108转动,从而使得所述料板卡爪安装座106转动,实现所述料板卡爪安装座106的水平翻转。
34.所述料板往复输送装置200用于携带所述料板夹取翻转装置100升降与水平运动,来实现玻璃料板600的夹取、输送;所述料板夹取翻转装置100中包括料板卡爪装置、卡爪开合装置和料板翻转装置,所述料板卡爪装置在所述卡爪开合装置的控制下,可自动实现同步张开与合并,用于完成玻璃料板600的自动夹取与松开过程,操作简单、工作效果高,同时通过所述料板翻转装置可以实现玻璃料板600的水平翻转,使得浆片位于玻璃料板600的下方,用于与所述浆片剥离装置300配合,方便所述浆片剥离装置300将浆片由玻璃料板600剥离下来。
35.所述浆片剥离装置300包括横跨所述输送线500上方的刮刀安装架301,所述刮刀安装架301上安装有用于将玻璃料板600上浆片剥离掉的浆片刮刀302,所述浆片刮刀302的宽度大于或等于玻璃料板600上浆片的宽度,且所述浆片刮刀302的位置与玻璃料板600的位置对应,即当玻璃料板600运动至所述浆片刮刀302的上方与所述浆片刮刀302接触后,当玻璃料板600继续运动时,所述浆片刮刀302可以将玻璃料板600上浆片一次清除掉。当刮浆机向玻璃料板600上涂覆浆料时,四周边缘留有空隙,使得浆片四周与玻璃料板600的四周边缘之间留有空隙,一方面方便所述料板夹取卡爪107的夹持,避免所述料板夹取卡爪107夹持时触碰到浆片,影响浆片质量;另一方面揭片时,使得所述浆片刮刀302首先接触到玻
璃料板600与浆片之间的空隙处,然后随着玻璃料板600的不断运动,所述浆片刮刀302可以首先接触到浆片的边缘,然后伸入至浆片与玻璃料板600之间的接触面上,因此随着玻璃料板600的不断继续运动,所述浆片刮刀302始终会接触到浆片与玻璃料板600之间的接触面,迫使浆片与玻璃料板600之间分离,实现浆片的自动剥离过程。
36.所述浆片刮刀302的刀刃向上倾斜设置且倾斜方向与所述玻璃料板600上浆片运动方向相反,所述浆片刮刀302与所述刮刀安装架301之间还设置有刮刀浮动装置。所述浆片刮刀302的刀刃为将浆片与玻璃料板600分离的作用部,为了保证浆片随着玻璃料板600运动时,所述浆片刮刀302的刀刃可以更加方便的将浆片剥离掉,因此使得所述浆片刮刀302的刀刃向上倾斜,并且倾斜方向与所述玻璃料板600上浆片运动方向相反,这样可以保证刀刃可以更加方便的伸入至浆片与玻璃料板600之间的接触面,剥离效果更好。
37.为了保证所述浆片刮刀302的刀刃可以与玻璃料板600之间紧密接触,因此设置有刮刀浮动装置,所述刮刀浮动装置包括固定在所述浆片刮刀302两端的刮刀转轴,所述刮刀转轴转动安装在所述刮刀安装架301上,所述浆片刮刀302与所述刮刀安装架301之间的所述刮刀转轴外套装有浮动扭簧。当玻璃料板600与浆片刮刀302之间未接触时,所述浮动扭簧使得所述浆片刮刀302向上摆动一个角度,当玻璃料板600下降逐渐接触到所述浆片刮刀302时,会克服所述浮动扭簧的弹性作用,使得所述浆片刮刀302向下摆动,而此时所述浆片刮刀302在所述浮动扭簧的作用下,会始终紧密抵靠到玻璃料板600的表面,避免在玻璃料板600运动过程中,所述浆片刮刀302脱离玻璃料板600而无法实现良好的剥离效果,当浆片剥离完成后玻璃料板600上升后,此时所述浆片刮刀302不再受到玻璃料板600的压力,在所述浮动扭簧的作用下向上摆动一个角度。在此所述浆片刮刀302向上摆动的角度较小,向上摆动后还仍然处于倾斜状态,方便刀刃伸入至浆片与玻璃料板600之间的接触面。
38.所述随动接料装置400包括随动接料安装架401,所述随动接料安装架401上安装有用于承接剥离后浆片的成品接料托盘402,所述成品接料托盘402的尺寸大于浆片的尺寸,保证可以铺满浆片,所述成品接料托盘402对应设置在所述浆片刮刀302的下方,且与玻璃料板600对应。所述成品接料托盘402的底端设置有在剥离初始位置与剥离结束位置之间运动用于跟随剥离后浆片进行同步接料的托盘行走装置,所述托盘行走装置安装在所述随动接料安装架401上,所述成品接料托盘402上还安装有驱动所述成品接料托盘402在所述剥离初始位置与剥离结束位置之间进行往复运动的往复驱动装置。
39.所述往复驱动装置包括安装在所述成品接料托盘402上的定位随动装置,所述定位随动装置可使得所述成品接料托盘402沿所述托盘行走装置由剥离初始位置运动至剥离结束位置,所述随动接料安装架401与所述成品接料托盘402之间还设置有托盘复位装置,所述托盘复位装置使得所述成品接料托盘402沿所述托盘行走装置由剥离结束位置运动至剥离初始位置。
40.所述定位随动装置包括安装在所述成品接料托盘402上的定位支架403,所述定位支架403上设置有定位销孔404,所述料板夹取翻转装置100上安装有与所述定位销孔404对应配合插接的定位销柱405。
41.所述托盘复位装置为托盘复位气缸,所述托盘复位气缸的缸体固定在所述随动接料安装架401上,所述托盘复位气缸的缸杆与所述成品接料托盘402的端部配合。所述托盘复位气缸并未在图中示出,其安装在剥离结束位置一侧,保证所述托盘复位气缸的缸杆伸
出时,可以接触到所述成品接料托盘402的端部并且将所述成品接料托盘402由剥离结束位置拖动至剥离初始位置。所述托盘复位气缸的缸体端部可以安装有用于推动所述成品接料托盘402的推板。所述托盘复位气缸未在图中示出。
42.所述托盘行走装置包括固定安装的托盘行走滑轨406,所述托盘行走滑轨406的方向与所述输送线500的方向平行,所述成品接料托盘402的底端安装有沿所述托盘行走滑轨406行走的托盘行走轮407。所述托盘行走轮407固定在所述成品接料托盘402的底端,与所述托盘行走滑轨406配合,实现所述成品接料托盘402行走移动。
43.所述随动接料装置400的工作原理为:
44.当所述料板夹取翻转装置100运动至所述剥离工位后,此时所述料板夹取翻转装置100上的所述定位销柱405正好位于所述定位销孔404的正上方,然后随着所述料板夹取翻转装置100的逐渐下降,使得玻璃料板600与所述浆片刮刀302正好配合后等待揭片,此处为剥离初始位置,此时所述定位销柱405正好插入至所述定位销孔404内,当所述料板夹取翻转装置100继续水平运动时,此时所述成品接料托盘402受到所述定位销柱405与定位销孔404配合关系的影响,此时所述成品接料托盘402会被所述料板夹取翻转装置100限制,从而使得所述托盘行走轮407沿着所述托盘行走滑轨406运动,即所述成品接料托盘402会随着所述料板夹取翻转装置100水平运动,实现了所述成品接料托盘402与玻璃料板600之间的同步运动,随着玻璃料板600的不断运动,浆片逐渐被所述浆片刮刀302剥离下来时,并逐渐落入至所述成品接料托盘402上,而随着所述成品接料托盘402运动至所述剥离结束位置时,此时玻璃料板600上的浆片被完全剥离掉,并且完全落入至所述成品接料托盘402上,由于所述成品接料托盘402与玻璃料板600之间同步运动,可以保证剥离下来的浆片正好平整的铺满所述成品接料托盘402上,如果所述成品接料托盘402不跟随玻璃料板600同步运动,即为静止的固定托盘时,随着浆片的逐渐剥离,会始终落在所述浆片刮刀302的下方,浆片会堆叠,无法形成一个平整的浆片,而本装置中由于使得所述成品接料托盘402与玻璃料板600同步运动,实现了同步接料的过程,即剥离下料的浆片会逐渐由所述成品接料托盘402的一端平铺至另一端,完成了浆片的随动接料过程;
45.当浆片被完全剥离完成后,所述料板夹取翻转装置100上升,使得所述定位销柱405从所述定位销孔404内脱离,所述料板夹取翻转装置100反向水平运动复位,此时操作人员将所述成品接料托盘402上的浆片取下,然后所述托盘复位气缸的缸杆伸出,推动所述成品接料托盘402的端部,使得所述成品接料托盘402由剥离结束位置滑动至剥离初始位置,等待下一次接料,然后所述托盘复位气缸的缸杆缩回。
46.本实用新型中设置所述浆片剥离装置,用于将所述料板夹取翻转装置100携带的玻璃料板600上的浆片剥离,通过两者的相对运动,将浆片自动剥离,结构简单、操作方便、效率高;并设置所述随动接料装置400,通过所述定位随动装置来实现随动同步接料的过程,保证浆片可以平整铺满在成品接料托盘402上,避免在成品接料托盘402上出现堆叠等现象影响到浆片成品质量。
47.以上显示和描述了本实用新型的基本原理、主要特征及本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型
要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1