一种串联式轨上行走预制件吊运系统的制作方法
1.本实用新型涉及盾构吊运设备技术领域,特别是指一种串联式轨上行走预制件吊运系统。
背景技术:
2.大直径盾构施工为提高施工效率,逐渐使用预制构件(管片和箱涵)进行同步施工,实现管片和箱涵的快速高效的吊运拼装往往在盾构上配置专用的吊机系统。以往的吊运系统由上下并联多套吊机系统组成,不仅对结构空间要求高,操作复杂,且成本高昂。如公开号为cn111963219的一种大直径盾构机物料吊运系统及其吊运方法,采用双管片吊机和箱涵吊机配合单管片吊机,通过自动化传感控制系统实现双管片吊机、单管片吊机、箱涵件吊机的安全联锁,且实现管片、箱涵件及其他物料的同步吊运。上述结构采用上下轨道设置,占用拖车内部空间,吊运效率受限。
技术实现要素:
3.针对上述背景技术中的不足,本实用新型提出一种串联式轨上行走预制件吊运系统,解决了现有技术中盾构预制件吊运系统结构复杂、吊运效率低的问题。
4.本实用新型的技术方案是这样实现的:一种串联式轨上行走预制件吊运系统,包括管片运输装置、箱涵件运输装置和设置在拖车顶部的行走轨道,行走轨道上串联设有单管片吊机和箱涵件吊机,单管片吊机位于箱涵件吊机的前方,行走轨道的卸料端的下方设有管片转运装置。
5.行走轨道为两道且左右对称设置在拖车上,单管片吊机和箱涵件吊机通过行走机构沿行走轨道运动。
6.小坡度隧道时,行走轨道为方钢轨道;行走机构为电机带动的钢轮,钢轮与方钢轨道配合。大坡度隧道时,行走轨道为齿条轨道;行走机构为电机带动的齿轮,齿轮与齿条轨道啮合。或者,大坡度隧道时,行走轨道为方钢轨道+齿条轨道;行走机构为电机带动的钢轮和齿轮,齿轮与齿条轨道啮合,钢轮与方钢轨道配合。
7.单管片吊机的前部设有前防护感应开关、尾部设有后防护感应开关,单管片吊机的中部设有落料感应开关,落料感应开关与设置在拖车上的落料点触发装置相对应。
8.单管片吊机为钢丝绳葫芦或环链葫芦,钢丝绳葫芦或环链葫芦的下部设有管片夹具。优选地,箱涵件吊机的前部设有第一防护感应开关,第一防护感应开关与单管片吊机相对应。
9.箱涵件吊机为钢丝绳葫芦或环链葫芦,钢丝绳葫芦或环链葫芦的下部设有箱涵件夹具。优选地,管片运输装置为自驱式管片运输小车,箱涵件运输装置为自驱式箱涵件运输小车。
10.本实用新型能够实现隧道施工中管片和箱涵的快速抓取以及吊运。前后串联布置,安全联锁控制简单;结构布置简单,通用性好。较以往大直径吊运系统,成本较低,经济
性好,解决大直径带箱涵隧道工程中预制件的成本高、效率低的吊运问题。本实用新型较以往3套吊机空间布置,不存在交叉作业风险,更为安全,且成本大幅下降;较以往吊机轨下悬挂式行走,结构更加安全,行走速度更高,施工更加高效。
附图说明
11.为了更清楚地说明本实用新型实施例,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
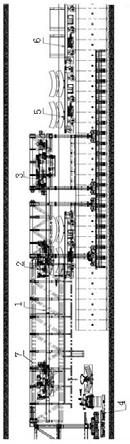
12.图1为本实用新型整体结构示意图。
13.图2为本实用新型单管片吊机结构示意图。
14.图3为本实用新型箱涵件吊机结构示意图。
15.图4为单管片吊机吊具下降抓取管片状态示意图。
16.图5为单管片吊机下放管片至管片转运装置上状态示意图。
17.图6为管片转运装置将管片送至拼装机下状态示意图。
18.图7为箱涵件吊机抓取整块箱涵件状态示意图。
19.图8为箱涵件水平拼装状态示意图。
20.图9为箱涵件翻身拼装状态示意图。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.如图1所示,实施例1,一种串联式轨上行走预制件吊运系统,包括管片运输装置5、箱涵件运输装置6和设置在拖车7顶部的行走轨道1,行走轨道1上串联设有单管片吊机2和箱涵件吊机3,单管片吊机2位于箱涵件吊机3的前方,单管片吊机和箱涵吊机均在拖车中间的同一轨道上行走,两套吊机前后串联布置,节省吊运空间,提高隧道施工的经济性。行走轨道1的卸料端的下方设有管片转运装置4,便于管片的转运。优选地,管片运输装置5为自驱式管片运输小车,箱涵件运输装置6为自驱式箱涵件运输小车,分别用于向单管片吊机、箱涵件吊机提供管片和箱涵件,实现连续快速吊运。
23.管片运输车可以是双头橡胶轮机车,也可以是钢轨行走编组列。将管片料垛运至位于前方的单管片吊机抓取位置,单管片吊机下放吊具每次仅夹紧一块管片起升并前行至管片转运装置上方,随后下放管片并旋转90
°
,使管片呈拼装姿态释放于管片转运装置上。管片转运装置再步进式行走将管片运至管片拼装机位置,管片拼装对管片进行整圆拼装。
24.箱涵件运输装置可以是双头橡胶轮机车,也可以是钢轨行走编组列车,将箱涵运至位于后方的箱涵吊机抓取位置,箱涵吊机下放吊具夹紧整个箱涵起升并前行至前方箱涵拼装区域,随后下放箱涵进行拼装。单管片吊机吊运一环管片(一环为9块或10块不等,依不同隧道而定),箱涵吊机吊运一次箱涵件。
25.进一步,如图2所示,单管片吊机2的前部设有前防护感应开关、尾部设有后防护感应开关。前防护感应开关,感应到前部设备时,单管片吊停止运动,避免与盾构机上设备干涉。后防护感应开关,在距箱涵吊机一定安全距离时触发,随后停机,达到与箱涵吊机的防撞联锁。单管片吊机2的中部设有落料感应开关,落料感应开关与设置在拖车上的落料点触发装置相对应,单管片吊机到达落料点时,单管片吊机开始下放管片到固定位置,达到精准落料的目的。单管片吊机2为钢丝绳葫芦或环链葫芦,钢丝绳葫芦或环链葫芦的下部设有管片夹具8,即管片夹具为配置的专用夹具,对管片进行安全稳定夹取。
26.进一步,如图3所示,箱涵件吊机3的前部设有第一防护感应开关,第一防护感应开关与单管片吊机2相对应。第一防护感应开关在距单管片吊机一定安全距离时触发,随后停机,达到与管片吊机的防撞联锁。箱涵件吊机3为钢丝绳葫芦或环链葫芦,钢丝绳葫芦或环链葫芦的下部设有箱涵件夹具9。箱涵件夹具为配置的专用夹具,对箱涵件进行安全稳定夹取。
27.实施例2,一种串联式轨上行走预制件吊运系统,行走轨道1为两道且左右对称设置在拖车7上,单管片吊机2和箱涵件吊机3通过行走机构沿行走轨道1运动。小坡度隧道时,行走轨道1为方钢轨道;行走机构为电机带动的钢轮,钢轮与方钢轨道配合。即小坡度时,采用摩擦钢轮驱动,配合夹轨器进行驻车制动,确保单管片吊机2和箱涵件吊机3的安全、顺利移动。其他结构与实施例1相同。
28.实施例3,一种串联式轨上行走预制件吊运系统,大坡度隧道时,行走轨道1为齿条轨道;行走机构为电机带动的齿轮,齿轮与齿条轨道啮合。采用齿条齿轮啮合形式,使单管片吊机2和箱涵件吊机3具有自锁功能,防止出现溜车现象,提高吊运安全性。其他结构与实施例1相同。
29.实施例4,一种串联式轨上行走预制件吊运系统,大坡度隧道时,行走轨道1为方钢轨道+齿条轨道;行走机构为电机带动的钢轮和齿轮,齿轮与齿条轨道啮合,钢轮与方钢轨道配合。采用齿条齿轮啮合形式,使单管片吊机2和箱涵件吊机3具有自锁功能,防止出现溜车现象,提高吊运安全性;钢轮与方钢轨道配合,提供稳定支撑。其他结构与实施例1相同。
30.串联式轨上行走预制件吊运系统的工作流程如下:
31.第一步:双梁式的行走轨道固定于盾构拖车结构上,将单管片吊机和箱涵吊机前后布置在该轨道上。
32.第二步:管片运输车运输多个管片至单管片吊机区域内,单管片吊机吊具下降抓取单个管片起升(图4)。
33.第三步:单管片吊机携带管片在轨道上前行至前方落料点位置,下放吊具及管片至管片转运装置上(图5)。
34.第四步:管片转运装置通过步进方式将管片前送至拼装机10下,拼装机拼装管片(图6)。
35.第五步:重复上述步骤,直至一环管片吊运和拼装完成。
36.第六步:箱涵运输车运输箱涵至箱涵吊机区域内,吊机吊具下降抓取整块箱涵后起升至高位(图7)。
37.第七步:箱涵件吊机携带箱涵在轨道上前行至拼装区域,下放箱涵后,与上一环箱涵对齐拼装。其中拼装方式分为水平拼装和翻身拼装两种(图8、图9)。
38.上述串联式轨上行走预制件吊运系统,空间布置简单,较以往3套吊机空间布置,不存在交叉作业风险,更为安全,且成本大幅下降。较以往吊机轨下悬挂式行走,结构更加安全,行走速度更高,施工更加高效。随着大断面隧道工程越来越多,本发明的应用范围也越来越广泛。
39.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1