水压试验专用自动升降机的制作方法
1.本实用新型属于工业生产装备技术领域,具体涉及一种水压试验专用自动升降机。
背景技术:
2.气瓶在进行水压试验前后,水套盖自动装卸装置配合自动升降动作,可完成水套盖与试验气瓶的连接、连接部位的高压密封工作以及密封解除、连接解除的工作。目前同类设备状况为:其一,均使用人工操作,进行水套盖与测试气瓶的连接及密封操作;其二,使用电动葫芦等吊具实现气瓶的输送和升降操作,也需要人员操作;其三,有部分采用龙门式移载机的方式进行气瓶的输送和升降动作的应用,可实现气瓶输送的自动化,但是水套盖的连接及连接解除仍需要人工操作,且气瓶输送工作的效率偏低;龙门移载机的动作虽实现电气化及部分自动化,但仍需要人为干预进行操作。因此,设计一种专用自动化设备来完成气瓶的水压试验是非常有必要的。
技术实现要素:
3.有鉴于此,本实用新型的目的是提供一种水压试验专用自动升降机,旨在解决气瓶水压试验操作中人工干预多、自动化程度不高的问题。
4.为达到上述目的,本实用新型提供一种水压试验专用自动升降机,包括机架、水套和水套盖及气瓶螺纹接头自动装卸机构,机架上设有导轨,导轨上设有升降台架,升降台架上设置水套盖及气瓶螺纹接头自动装卸机构,机架上还设置有作用于升降台架的升降驱动组件。
5.进一步,升降驱动组件由链轮、链条、油缸、液压动力源组成,油缸固定于机架上,并与液压动力源相连,其伸出端同链轮转动连接;链条一端固定于机架上,另一端绕于链轮上并与升降台架连接。
6.进一步,所述油缸为伺服油缸。
7.进一步,升降驱动组件由丝杆、电机组成,丝杆转动的设于机架上,电机固定于机架上,且电机驱使丝杆旋转,升降台架与丝杆转动连接。
8.进一步,电机为伺服电机。
9.进一步,丝杆为滚珠丝杆。
10.进一步,水套设于下沉地面的水套坑内。
11.进一步,机架为型腔体结构,所述升降驱动组件设于机架的型腔内。
12.进一步,机架的顶部设有位置传感器,所述位置传感器为光电传感器。
13.本实用新型的有益效果在于:本实用新型的水压试验专用自动升降机可与工业机器人相配合来实现气瓶的自动输送,并通过自动升降动作,将气瓶随连同水套盖升降,以将测试气瓶放入(或取出)测试水套从而实现气瓶水压试验的自动化无人操作。并具有结构简单紧凑,操作方便,有效减轻工人的劳动强度,提高工作效率,同时提高操作安全性,减少安
全隐患,且生产节奏快,占地面积小等优点。
14.本实用新型的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本实用新型的实践中得到教导。本实用新型的目标和其他优点可以通过下面的说明书来实现和获得。
附图说明
15.为了使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型作优选的详细描述,其中:
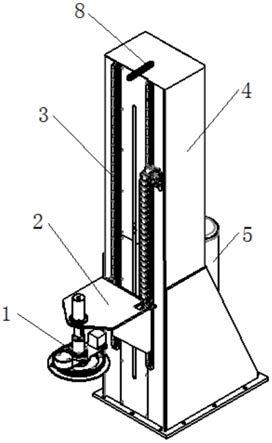
16.图1为本实用新型水压试验专用自动升降机的立体结构示意图;
17.图2为图1的侧面示意图;
18.图3为本实用新型水压试验专用自动升降机的升降驱动组件另一结构示意图;
19.附图标记:水套盖及气瓶螺纹接头自动装卸机构1、升降台架2、导轨3、机架4、升降驱动组件5、水套6、水套坑7、位置传感器8;链轮51、链条52、油缸53、液压动力源54、丝杆55、电机56。
具体实施方式
20.以下通过特定的具体实例说明本实用新型的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本实用新型的其他优点与功效。本实用新型还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本实用新型的精神下进行各种修饰或改变。需要说明的是,以下实施例中所提供的图示仅以示意方式说明本实用新型的基本构想,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
21.其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本实用新型的限制;为了更好地说明本实用新型的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
22.如图1、2所示,本实施例提及的一种水压试验专用自动升降机,用于气瓶进行外测法水压试验的水压试验装置专用设备,包括有水套盖及气瓶螺纹接头自动装卸机构1、升降台架2、导轨3、机架4、升降驱动组件5和水套6,其中,机架4上设有导轨3,导轨3上设有升降台架2,水套盖及气瓶螺纹接头自动装卸机构1设置在升降台架2,机架4上还设置有作用于升降台架2的升降驱动组件5,升降驱动组件5则由链轮51、链条52、油缸53、液压动力源54组成,油缸53固定于机架4上,并与液压动力源54相连,其伸出端同链轮51转动连接;链条52一端固定于机架4上,另一端绕于链轮51上并与升降台架2连接。采用上述方案,本水压试验专用自动升降机可与工业机器人相配合来实现气瓶的自动输送,并通过自动升降动作,将气瓶随连同水套盖升降,以将测试气瓶放入(或取出)测试水套从而实现气瓶水压试验的自动化无人操作。
23.在本实施例中的导轨3为双轨式直线滑轨结构。能够使得升降台架2运动平稳。
24.具体的,两条导轨3平行固定在机架4上,升降台架2与导轨3上的滑块(未画出)固
定连接,使升降台架2可沿导轨3移动。水套盖及气瓶螺纹接头自动装卸机构1,是本技术人之前申请的发明专利,申请号为zl200910028177.1,这里就不在赘述来,其固定安装在升降台架2上,可随升降台架2一起移动,水套盖及气瓶螺纹接头自动装卸机构1可在其中的减速电机的驱动下,进行正反向旋转,使其下端与气瓶瓶口螺纹配合的接头拧入(或拧出)气瓶的瓶口螺纹。拧入时,达到一定扭矩自动停止;螺纹全部拧出时,自动停止。可在需要时,完成和气瓶瓶口螺纹连接处的密封(或密封解除)工作。升降驱动组件5可采用液压式。即由油缸53、轴端的链轮51、链条52及液压动力源54组成,其链轮51上的滑轮接头一端与油缸的轴通过螺纹固定连接,一端与滑轮通过销轴、轴承铰接,而链条饶过滑轮,一端与升降台架2连接,一端与机架4连接,当油缸伸缩动作时,可通过链条52传动,使升降台架2沿导轨3升降,由液压动力源54提供动力,实现油缸53的伸缩动作,该油缸采用伺服油缸,易于实现电气控制。另外,还设置有升降台架2的位置测量装置,如位置传感器8或激光测距仪器等,可实时获取升降台架2所处高度位置,并通过升降动作的上、下限位置设定进行动作的自动控制。
25.如图3所示,在不同示例中,升降驱动组件5可以不局限于采用液压式的,还可以是采用电机56、丝杆55传动实现升降动作也是可行的,同样可以达到驱使升降台架2上下运动的目的。该电机56可以采用伺服电机,易于电气控制;该丝杆55可以采用滚珠丝杆,使得升降台架2的升降运动更加平顺。
26.在本实施例中的水套6设于下沉地面的水套坑7内。有效保证升降台架的起升高度。
27.在本实施例中的机架4为型腔体结构,升降驱动组件5设于机架4的型腔内。以保证升降驱动组件的工作顺畅。
28.简单的说明下本水压试验专用自动升降机的动作说明:首先,工业机器人将测试气瓶(垂直且瓶口朝上状态)输送至本设备下方;接着,升降驱动组件5动作,油缸53复位,升降台架2连同水套盖及气瓶螺纹接头自动装卸机构1下降,至水套盖及气瓶螺纹接头自动装卸机构1下端的接头插入气瓶瓶口螺纹内(有传感器获取信号)时,升降驱动组件5停止工作;然后,水套盖及气瓶螺纹接头自动装卸机构1的减速电机启动,水套盖旋转,将其下端的接头拧入气瓶瓶口螺纹,至达到一定扭矩后停止旋转;然后,工业机器人松开气瓶;接着,水套盖及气瓶螺纹接头自动装卸机构1内部的密封用气缸复位,进行气瓶瓶口螺纹连接处密封;同时,升降驱动组件5动作,油缸53复位,升降台架2连同水套盖及气瓶螺纹接头自动装卸机构1、气瓶一起继续下降,将气瓶放置到本产品下方的试验用的水套坑7的水套6中,完成水套盖与水套连接部位的密封后,可以进行气瓶的外测法水压试验;然后,在外测法水压试验完成后,解除水套盖与水套连接部位的密封,解除气瓶瓶口螺纹连接处密封,升降驱动组件5动作,油缸顶升,升降台架2连同水套盖及气瓶螺纹接头自动装卸机构1、气瓶一起上升,到位后停止;然后,工业机器人运动至本设备下方,将气瓶夹紧;接着,水套盖及气瓶螺纹接头自动装卸机构1的减速电机启动,水套盖旋转,将其下端的接头拧出气瓶瓶口螺纹后停止;最后,升降驱动组件5动作,油缸顶升,升降台架2连同水套盖及气瓶螺纹接头自动装卸机构1上升少许后可等待后续气瓶进入进行试验;工业机器人将完成试验的气瓶输送至后续设备进行其它工作。
29.最后说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本
实用新型的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,其均应涵盖在本实用新型的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1