一种改进拉袋机构的自动打包垃圾桶的制作方法
1.本实用新型涉及垃圾桶技术领域,尤其是涉及一种改进拉袋机构的自动打包垃圾桶。
背景技术:
2.随着科技的发展,自动化逐渐步入我们的生活中,诸如智能家居等智能化设备,解放人们的双手,给人们的生活带来了诸多的便利;而垃圾桶作为日常临时存放垃圾的生活必需品,自然也少不了面向智能化、自动化的发展。传统的垃圾桶在使用时为方便丢弃垃圾,需要在垃圾桶上套设一次性塑料垃圾袋,因此需要人们反复套设垃圾袋,操作繁琐,且丢弃垃圾时还需手工收拢袋口提起垃圾袋,双手极易触碰到垃圾,污染双手,造成细菌滋生。垃圾桶智能化、自动化后,可实现自动套袋、自动封口打包等功能,无需人工反复套袋,且避免了垃圾与人的接触,卫生干净。现有技术中,为实现上述功能,需在垃圾桶的上方安装特制的环形通体垃圾袋,再配合垃圾桶下方的抽气扇将垃圾袋下拉至垃圾桶内,仅通过抽气扇抽出垃圾袋,抽袋力度小,且在抽袋的过程中容易刮伤垃圾袋,造成垃圾溢出,污染整个垃圾桶;在打包时,通过收口装置将垃圾袋的袋口收拢至封口处,再通过前后移动的封口装置抵压在封口处进行封口、封底以及熔断,封口步骤繁琐,封口效率低,速度慢;需要安装多个驱动机构,结构复杂,成本高,因此有必要予以改进。
技术实现要素:
3.针对现有技术存在的不足,本实用新型的目的是提供一种改进拉袋机构的自动打包垃圾桶,结构简单,成本低,只需一个驱动机构即可完成装袋和打包。
4.为了实现上述目的,本实用新型所采用的技术方案是:一种改进拉袋机构的自动打包垃圾桶,包括桶身和的桶盖,桶身的上部开设有一丢弃口,桶盖活动连接桶身并盖合丢弃口,桶身的内部具有一用于盛装垃圾的桶腔,丢弃口的一侧活动安装有用于储存多个垃圾袋的储袋机构,桶腔的上部设置有拉袋机构,拉袋机构包括拉袋滑座、滑座驱动机构、夹袋装置和开夹装置,拉袋滑座滑动安装于桶盖或桶身的上部,滑座驱动机构传动连接拉袋滑座,拉袋滑座与储袋机构之间作远离或靠近运动配合;
5.夹袋装置包括至少一拉袋夹,拉袋夹固定或滑动安装于拉袋滑座,拉袋夹与储袋机构活动抵顶配合;
6.开夹装置包括触发转柄、开夹顶块、关夹顶块和开夹转柄,开夹顶块和关夹顶块分别固定设置于丢弃口的两个相对侧,开夹顶块位于拉袋滑座的后方,关夹顶块位于储袋机构的后方,开夹转柄旋转安装于拉袋滑座,开夹转柄与拉袋夹活动抵顶配合,触发转柄旋转安装于拉袋滑座,开夹顶块和关夹顶块分别活动抵顶触发转柄,触发转柄传动连接开夹转柄。
7.进一步的技术方案中,拉袋滑座的两端分别开设有拉袋安装口,每个拉袋安装口分别滑动安装有一拉袋夹,每个拉袋夹均活动连接有一开夹装置,拉袋夹与拉袋滑座之间
连接有弹性复位件,以实现对拉袋夹向储袋机构的方向复位。
8.进一步的技术方案中,触发转柄包括触发传动齿轮和触发杆,触发传动齿轮采用扇形齿轮,触发杆的第一端固接或一体成型与扇形齿轮的光滑面,触发杆的第二端活动抵顶开夹顶块和关夹顶块,触发转柄以扇形齿轮的轴心为旋转轴旋转安装在拉袋滑座,扇形齿轮传动连接开夹转柄。
9.进一步的技术方案中,开夹转柄的侧面设置有一开夹传动齿轮,开夹传动齿轮与开夹转柄的旋转轴同轴,扇形齿轮与开夹传动齿轮齿接。
10.进一步的技术方案中,触发杆的第二端旋转安装有触发滚轮,触发滚轮与开夹顶块和关夹顶块活动抵顶配合;开夹转柄的端部旋转安装有开夹滚轮,开夹滚轮与拉袋夹活动抵顶配合。
11.进一步的技术方案中,拉袋滑座具有夹袋位置、停止位置和开夹位置,
12.拉袋滑座位于夹袋位置时,拉袋滑座的前侧面抵顶储袋机构,拉袋夹相对拉袋滑座向后滑动,拉袋夹的前端部抵顶垃圾袋,触发转柄与关夹顶块抵顶配合,以实现在夹袋位置时闭合拉袋夹并夹持垃圾袋;
13.拉袋滑座位于停止位置时,拉袋滑座从夹袋位置滑动至临近开夹顶块的丢弃口的一侧,以实现将垃圾袋的袋口撑开并通过两个拉袋夹在丢弃口的下方形成一矩形的垃圾袋开口;
14.拉袋滑座位于开夹位置时,拉袋滑座从停止位置向后滑动至开夹顶块的下方,开夹顶块与触发转柄抵顶配合,以实现在开夹位置时打开拉袋夹。
15.进一步的技术方案中,弹性复位件采用复位扭簧和/或复位拉簧,复位扭簧的一端抵顶拉袋夹的后端部、另一端抵顶拉袋滑座的后侧,复位拉簧的一端连接拉袋滑座的前侧、另一端连接拉袋夹的后端部,以实现对拉袋夹向前复位。
16.进一步的技术方案中,拉袋机构还设置有封口机构,封口机构包括发热条和橡胶垫,发热条安装于储袋机构的下方或拉袋滑座相对储袋机构的一侧,相应的,橡胶垫安装于拉袋滑座相对储袋机构的一侧或储袋机构的下方,发热条与橡胶垫活动抵顶配合,以实现对垃圾袋热熔封口。
17.进一步的技术方案中,自动打包垃圾桶还设置有触发装置,触发装置包括若干个触发开关,夹袋位置、停止位置和开夹位置分别安装有一触发开关,各触发开关分别电性连接滑座驱动机构,拉袋滑座与各个触发开关触发配合,以实现改变拉袋滑座的移动方向。
18.进一步的技术方案中,储袋机构包括储袋盒和挂袋架,储袋盒活动安装于丢弃口的一侧,挂袋架和储袋盒卡扣连接,挂袋架和储袋盒的内部形成一储袋腔室,挂袋架的左右两端分别向储袋盒延伸出一挂袋柱,挂袋柱与储袋盒抵顶配合,挂袋架相对于拉袋滑座的一侧开设有出袋口,多个垃圾袋的上部的左右两端分别逐个挂设在挂袋柱上,多个垃圾袋的下部折叠或收卷至储袋腔室,拉袋时拉袋夹插入出袋口与垃圾袋的一侧抵顶配合,以实现将垃圾袋经出袋口从储袋腔室拉出。
19.采用上述结构后,本实用新型和现有技术相比所具有的优点是:通过拉袋滑座前后移动使触发转柄分别抵顶开夹顶块和关夹顶块,从而在拉袋滑座前后移动的同时驱动触发转柄和开夹转柄旋转打开拉袋夹,无需独立的驱动机构驱动打开拉袋夹,仅需一个滑座驱动机构即可完成自动打包和装袋,结构简单,成本低;拉袋夹夹持固定垃圾袋并随拉袋滑
座移动将垃圾袋的一侧拉出,拉袋夹夹持力大,使用电机或手动驱动拉袋滑座,拉袋力度大,装袋成功率高;垃圾袋一侧固定在拉袋滑座、另一侧固定在储袋机构上,在丢弃口下方形成矩形的袋口,防止垃圾掉落至垃圾袋外面,干净卫生;封口机构设置在拉袋滑座上,在拉袋夹夹持垃圾袋的同时完成封口,打包效率高,进一步简化了结构,降低了制造成本。
附图说明
20.下面结合附图和实施例对本实用新型进一步说明。
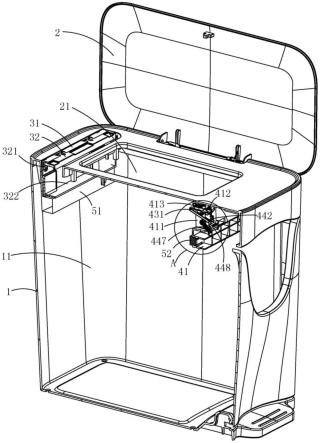
21.图1是本实用新型的结构示意图;
22.图2是本实用新型的图1的a部放大图;
23.图3是本实用新型的拉袋滑座位于夹袋位置时的状态图;
24.图4是本实用新型的拉袋滑座位于停止位置时的状态图;
25.图5是本实用新型的拉袋滑座位于开夹位置时的状态图;
26.图6是本实用新型的拉袋滑座的结构示意图;
27.图7是本实用新型的拉袋夹、触发转柄和开夹转柄的连接示意图。
28.图中:
29.1桶身、11桶腔;
30.2桶盖、21丢弃口;
31.31储袋盒、32挂袋架、321挂袋柱、322出袋口;
32.41拉袋滑座、411拉袋安装口、412复位扭簧、413复位拉簧、431拉袋夹、441触发转柄、442扇形齿轮、443触发杆、444触发滚轮、445开夹顶块、446关夹顶块、447开夹转柄、448开夹传动齿轮、449开夹滚轮;
33.51发热条、52橡胶垫。
具体实施方式
34.以下仅为本实用新型的较佳实施例,并不因此而限定本实用新型的保护范围。
35.一种改进拉袋机构的自动打包垃圾桶,如图1至图7所示,包括桶身1和的桶盖2,桶身1的上部开设有一丢弃口21,桶盖2活动连接桶身1并盖合丢弃口21,桶身1的内部具有一用于盛装垃圾的桶腔11,丢弃口21的一侧活动安装有用于储存多个垃圾袋的储袋机构,其特征在于:桶腔11的上部设置有拉袋机构,拉袋机构包括拉袋滑座41、滑座驱动机构、夹袋装置和开夹装置,拉袋滑座41滑动安装于桶盖2或桶身1的上部,滑座驱动机构传动连接拉袋滑座41,拉袋滑座41与储袋机构之间作远离或靠近运动配合;
36.夹袋装置包括至少一拉袋夹431,拉袋夹431固定或滑动安装于拉袋滑座41,拉袋夹431与储袋机构活动抵顶配合;
37.开夹装置包括触发转柄441、开夹顶块445、关夹顶块446和开夹转柄447,开夹顶块445和关夹顶块446分别固定设置于丢弃口21的两个相对侧,开夹顶块445位于拉袋滑座41的后方,关夹顶块446位于储袋机构的后方,开夹转柄447旋转安装于拉袋滑座41,开夹转柄447与拉袋夹431活动抵顶配合,触发转柄441旋转安装于拉袋滑座41,开夹顶块445和关夹顶块446分别活动抵顶触发转柄441,触发转柄441传动连接开夹转柄447。
38.传统的自动打包垃圾桶大多采用特制的环形通体的垃圾袋,通过桶身1下部的抽
气扇对桶腔11抽气,从而产生负压将垃圾袋从储袋机构中从上至下的拉出,并配合封口机构进行封口、封底和熔断等操作,结构复杂,打包和装袋步骤繁琐,打包效率低;而本实用新型通过拉袋滑座41前后移动使触发转柄441分别抵顶开夹顶块445和关夹顶块446,从而在拉袋滑座41前后移动的同时驱动触发转柄441和开夹转柄447旋转打开拉袋夹431,无需独立的驱动机构驱动打开拉袋夹431,仅需一个滑座驱动机构即可完成自动打包和装袋,结构简单,成本低;拉袋夹431夹持固定垃圾袋并随拉袋滑座41移动将垃圾袋的一侧拉出,拉袋夹431夹持力大,使用电机或手动驱动拉袋滑座41,拉袋力度大,装袋成功率高。
39.具体地,拉袋滑座41的两端分别开设有拉袋安装口411,每个拉袋安装口411分别滑动安装有一拉袋夹431,每个拉袋夹431均活动连接有一开夹装置,拉袋夹431与拉袋滑座41之间连接有弹性复位件,以实现对拉袋夹431向储袋机构的方向复位。两个拉袋夹431夹持垃圾袋一侧后将垃圾袋拉出,垃圾袋的一侧固定在拉袋滑座41、另一侧固定在储袋机构上,在丢弃口21下方形成矩形的袋口,防止垃圾掉落至垃圾袋外面,干净卫生;拉袋夹431相对拉袋滑座41滑动,在夹持垃圾袋时,拉袋夹431率先触碰垃圾袋,拉袋滑座41继续移动,拉袋夹431相对拉袋滑座41滑动,从而使拉袋夹431抵压住垃圾袋的一侧,防止垃圾袋位移导致无法夹持垃圾袋,且储袋机构中的垃圾袋随使用次数不断减少,需拉袋夹431相对弹性伸缩,从而将储袋机构中的垃圾袋全数依次拉出。
40.具体地,触发转柄441包括触发传动齿轮和触发杆443,触发传动齿轮采用扇形齿轮442,触发杆443的第一端固接或一体成型与扇形齿轮442的光滑面,触发杆443的第二端活动抵顶开夹顶块445和关夹顶块446,触发转柄441以扇形齿轮442的轴心为旋转轴旋转安装在拉袋滑座41,扇形齿轮442传动连接开夹转柄447。
41.具体地,开夹转柄447的侧面设置有一开夹传动齿轮448,开夹传动齿轮448与开夹转柄447的旋转轴同轴,扇形齿轮442与开夹传动齿轮448齿接。
42.在开夹和关夹时,触发杆443分别抵顶开夹顶块445和关夹顶块446,同时拉袋滑座41前后移动,从而驱动触发转柄441旋转,扇形齿轮442则旋转驱动开夹传动齿轮448旋转,因此开夹转柄447抵顶或远离拉袋夹431,完成开夹和关夹,传动机构简单,可靠性和稳定性高,成本低。
43.具体地,触发杆443的第二端旋转安装有触发滚轮444,触发滚轮444与开夹顶块445和关夹顶块446活动抵顶配合;开夹转柄447的端部旋转安装有开夹滚轮449,开夹滚轮449与拉袋夹431活动抵顶配合。触发滚轮444降低了触发杆443分别与开夹顶块445和关夹顶块446的摩擦力,开夹滚轮449降低了开夹转柄447与拉袋夹431的摩擦力;从而降低了触发杆443和开夹转柄447的磨损,延长了触发杆443和开夹转柄447的使用寿命,防止在开夹时出现卡涩等现象,且降低了拉袋滑座41的驱动力。
44.具体地,拉袋滑座41具有夹袋位置、停止位置和开夹位置,
45.在装袋时,拉袋滑座41向储袋机构移动,如图3所示,拉袋滑座41位于夹袋位置时,拉袋滑座41的前侧面抵顶储袋机构,拉袋夹431相对拉袋滑座41向后滑动,拉袋夹431的前端部抵顶垃圾袋,触发转柄441与关夹顶块446抵顶配合,以实现在夹袋位置时闭合拉袋夹431并夹持垃圾袋;与此同时,触发滚轮444接触并抵顶关夹顶块446,拉袋滑座41继续向储袋机构移动,从而驱动触发转柄441旋转带动开夹转柄447向下旋转,开夹转柄447逐渐向下旋转,拉袋夹431在其自身的弹簧作用下逐渐闭合,从而夹持住垃圾袋。
46.在拉袋时,拉袋夹431夹持住垃圾袋一侧后,如图4所示,拉袋滑座41位于停止位置时,拉袋滑座41从夹袋位置滑动至临近开夹顶块445的丢弃口21的一侧,以实现将垃圾袋的袋口撑开并通过两个拉袋夹431在丢弃口21的下方形成一矩形的垃圾袋开口;在使用垃圾桶时,拉袋滑座41始终保持在停止位置。
47.当垃圾袋盛装满后,打包并更换垃圾袋时,如图5所示,拉袋滑座41位于开夹位置时,拉袋滑座41从停止位置向后滑动至开夹顶块445的下方,开夹顶块445与触发转柄441抵顶配合,以实现在开夹位置时打开拉袋夹431。与此同时,触发滚轮444接触并抵顶开夹顶块445,拉袋滑座41继续向后移动,从而驱动触发转柄441旋转带动开夹转柄447向上旋转,开夹滚轮449抵顶拉袋夹431从而打开拉袋夹431。
48.具体地,弹性复位件采用复位扭簧412和/或复位拉簧413,复位扭簧412的一端抵顶拉袋夹431的后端部、另一端抵顶拉袋滑座41的后侧,复位拉簧413的一端连接拉袋滑座41的前侧、另一端连接拉袋夹431的后端部,以实现对拉袋夹431向前复位。在拉袋滑座41位于夹袋位置时,拉袋夹431相对拉袋滑座41滑动,当弹性复位件采用复位扭簧412时,拉袋夹431的后端部抵压复位扭簧412,当拉袋滑座41向后移动时,拉袋夹431在复位扭簧412的作用下向前复位;当弹性复位件采用复位拉簧413时,拉袋滑座41位于夹袋位置后拉扯复位拉簧413,拉袋滑座41向后移动,拉袋夹431在复位拉簧413的作用下向前复位;复位扭簧412和复位拉簧413任选其一或同时使用复位扭簧412和复位拉簧413,加强拉袋夹431复位力度和抵压垃圾袋的压力。
49.具体地,拉袋机构还设置有封口机构,封口机构包括发热条51和橡胶垫52,发热条51安装于储袋机构的下方或拉袋滑座41相对储袋机构的一侧,相应的,橡胶垫52安装于拉袋滑座41相对储袋机构的一侧或储袋机构的下方,发热条51与橡胶垫52活动抵顶配合,以实现对垃圾袋热熔封口。
50.当盛装满垃圾后,拉袋滑座41从停止位置移动至夹袋位置,此时垃圾袋的袋口夹持在发热条51和橡胶垫52之间,发热条51通电发热对垃圾袋袋口进行热熔封口,封口完成后,拉袋滑座41再从停止位置移动至开夹位置打开拉袋夹431进行重新装袋操作;封口机构设置在装袋机构上,结构简单,成本低,利用拉袋滑座41前后移动的同时完成封口,封口效率高。
51.具体地,自动打包垃圾桶还设置有触发装置,触发装置包括若干个触发开关,夹袋位置、停止位置和开夹位置分别安装有一触发开关,各触发开关分别电性连接滑座驱动机构,拉袋滑座41与各个触发开关触发配合,以实现改变拉袋滑座41的移动方向。较佳地,滑座驱动机构采用电机驱动,触发开关分别电性连接电机,通过拉袋滑座41触发不同位置的触发开关控制电机的正转和反转以及停机动作,操作方便。
52.具体地,储袋机构包括储袋盒31和挂袋架32,储袋盒31活动安装于丢弃口21的一侧,挂袋架32和储袋盒31卡扣连接,挂袋架32的左右两端分别向储袋盒31延伸出一挂袋柱321,挂袋柱321与储袋盒31抵顶配合,挂袋架32相对于拉袋滑座41的一侧开设有出袋口322,拉袋时拉袋夹431插入出袋口322与垃圾袋的一侧抵顶配合,以实现将垃圾袋从出袋口322拉出。
53.具体地,储袋机构包括储袋盒31和挂袋架32,储袋盒31活动安装于丢弃口21的一侧,挂袋架32和储袋盒31卡扣连接,挂袋架32和储袋盒31的内部形成一储袋腔室,挂袋架32
的左右两端分别向储袋盒31延伸出一挂袋柱321,挂袋柱321与储袋盒31抵顶配合,挂袋架32相对于拉袋滑座41的一侧开设有出袋口322,多个垃圾袋的上部的左右两端分别逐个挂设在挂袋柱321上,多个垃圾袋的下部折叠或收卷至储袋腔室,拉袋时拉袋夹431插入出袋口322与垃圾袋的一侧抵顶配合,以实现将垃圾袋经出袋口322从储袋腔室拉出。储袋盒31活动安装在桶身1,便于更换垃圾袋,使用方便;当需要添加垃圾袋时,分离挂袋架32和储袋盒31,仅需更换新的挂袋架32即可,无需更换整个储袋机构,降低了耗材成本和使用成本的同时,无需人手工挂设垃圾袋和手工收卷或折叠垃圾袋,使用更加方便。
54.以上内容仅为本实用新型的较佳实施例,对于本领域的普通技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处,本说明书内容不应理解为对本实用新型的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1