一种干湿垃圾分离收集装置的制作方法
1.本实用新型涉及干湿垃圾分类收集技术领域,具体来说是一种干湿垃圾分离收集装置。
背景技术:
2.目前我国正推行的居民生活垃圾干湿垃圾分类投弃,根据分类投弃的要求居民需要对干湿垃圾分类打包后再投入专用垃圾桶。由于包装湿垃圾的垃圾袋本身属于干垃圾的范畴,为解决袋装的湿垃圾料袋分离自动化的需求,市场上陆续出现的一些湿垃圾料袋分离装置,但这些装置大多数是以破袋方式来实现湿垃圾的料袋分离的。如中国专利“cn201921860021.5
”ꢀ
提供的一种袋物自动分离的垃圾收集装置,通过破袋装置的刀片将垃圾袋切割开,使得垃圾袋中的湿垃圾掉落至湿垃圾桶中,这种破袋式的湿垃圾分离装置主要针对居民喜欢将垃圾袋袋口打结扎紧的使用习惯而设计的,以实现湿垃圾料袋分离。但这种方式具备以下缺陷:
3.对于一些不将垃圾袋袋口扎紧的居民,这种处理方式容易造成湿垃圾的飞溅;受到垃圾污染的刀片在使用和维修的过程中,容易划伤维修人员和投放垃圾的居民,会造成人体的感染风险;投放垃圾需要的时间较长,给居民造成不便,且投放垃圾的位置较为深入,会给用户带来不好的用户体验;破袋刀具和夹袋装置的结构较为复杂,可靠性相对降低。
技术实现要素:
4.本实用新型的目的在于解决现有技术的不足,提供一种对湿垃圾袋进行倾倒使湿垃圾从垃圾袋中脱离出来,将湿垃圾和垃圾袋分别投入湿垃圾桶和干垃圾桶,各自收集的智能化装置。
5.为了实现上述目的,设计一种干湿垃圾分离收集装置,包括机箱壳体,所述机箱壳体上方设有至少两个投料口,所述机箱壳体内部下方与所述投料口对应设有至少两个垃圾桶,所述垃圾桶上方设有一夹袋机构,包括一翻转夹袋料斗,所述翻转夹袋料斗底部设有至少一对相对设置的夹袋爪,所述夹袋爪下方设有用于驱动夹袋爪放开收拢的滑动模组;一翻转机构,包括传动机构和移动翻斗支架,所述传动机构安装在移动翻斗支架上,所述翻转夹袋料斗上设有轴承,连接传动机构进行翻转。
6.本实用新型还具有如下优选的技术方案:
7.在一些实施例中,所述夹袋机构的翻转夹袋料斗底部设有至少一个通孔或槽口,所述通孔或槽口的两侧设有所述夹袋爪。
8.在一些实施例中,所述翻转夹袋料斗的轴承安装在左右或前后两侧,所述传动机构为同步齿形带传动机构,连接所述轴承使所述翻转夹袋料斗可前后翻转或水平翻转。
9.在一些实施例中,还包括一水平位移机构,包括驱动部和导向部。
10.在一些实施例中,所述驱动部包括一安装于所述机箱壳体内部后侧壁上的齿条,
所述翻转机构还包括一电机,电机设有与所述齿条配合的齿轮。
11.在一些实施例中,所述导向部包括至少一根位于所述移动翻斗支架侧面的支架滑轨,所述支架滑轨两端与所述机箱壳体左右两侧壁固定。
12.在一些实施例中,所述水平位移机构还包括一安装在所述支架滑轨上与所述齿条连接的空袋夹爪,所述空袋夹爪位于所述翻转机构上方。
13.如上述任一实施例中,所述投料口处设有门框机构,包括门板和用于移动门板的滑动轨道。
14.进一步的,所述机箱壳体外侧设有显示屏、读卡器和第二摄像头,内侧设有面对垃圾桶的第一摄像头,所述垃圾桶的底部设有称重传感器。
15.进一步的,所述机箱壳体下部设有与所述垃圾桶对应的卸料门。
16.实用新型的有益效果
17.本实用新型所提供的一种干湿垃圾分离收集装置的优点包括但不限于:本实用新型通过翻转夹袋料斗夹住垃圾袋,将垃圾袋翻转后翻动,将垃圾袋内的湿垃圾倒入和抖入垃圾桶中,在避免了刀具切割垃圾袋可能发生事故的同时,能够将垃圾袋和湿垃圾分离,是一种快捷安全有效的干湿垃圾分离收集装置。
附图说明
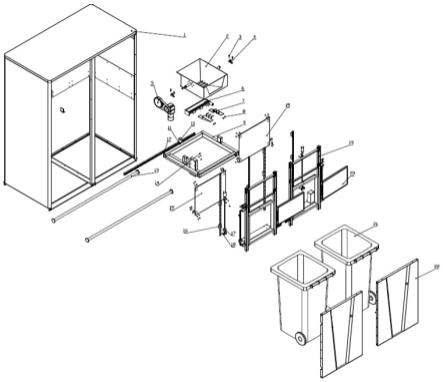
18.图1示例性示出了本实用新型的整体结构爆炸图;
19.图2示例性示出了本实用新型的工作流程步骤一;
20.图3示例性示出了本实用新型的工作流程步骤二;
21.图4示例性示出了本实用新型的工作流程步骤三;
22.图5示例性示出了本实用新型的工作流程步骤四;
23.图6示例性示出了本实用新型的工作流程步骤五;
24.图7示例性示出了本实用新型的工作流程步骤六;
25.图8示例性示出了本实用新型的工作流程步骤七;
26.图9示例性示出了本实用新型的工作流程步骤八;
27.图10示例性示出了本实用新型的夹袋爪的结构示意图;
28.图11示例性示出了具备空袋夹爪的本实用新型的结构示意图;
29.图12示例性示出了本实用新型水平位移机构导向部的一种实施例的结构示意图;
30.图13示例性示出了本实用新型水平位移机构导向部的另一种实施例的结构示意图;
31.图中:1.机箱壳体2.翻转夹袋料斗3.连接螺钉4.轴承5.传动机构6.滑动模组7.夹袋爪8.固定螺钉9.移动翻斗支架10.电机11.齿轮12.齿条13.支架滑轨14.安装螺钉15.门板16.滑动轨道17.电动丝杆滑块机构18.紧定螺钉19.门框机构20.显示屏21.垃圾桶22.卸料门23.空袋夹爪。
具体实施方式
32.下面结合附图和实施例,对本实用新型采用的技术方案做进一步说明。本实用新型的结构和原理对本专业的人来说是非常清楚的。应当理解,此处所描述的具体实施例仅
仅用以解释本实用新型,并不用于限定本实用新型。
33.参见图1,为本实用新型提供的一种干湿垃圾分离收集装置的具体实施例,在本实施例中,所述干湿垃圾分离收集装置包括机箱壳体,所述机箱壳体上方设有至少两个投料口,所述机箱壳体内部下方与所述投料口对应设有至少两个垃圾桶,所述垃圾桶上方设有一夹袋机构,包括一翻转夹袋料斗,所述翻转夹袋料斗底部设有至少一对相对设置的夹袋爪,所述夹袋爪下方设有用于驱动夹袋爪放开收拢的滑动模组;一翻转机构,包括传动机构和移动翻斗支架,所述传动机构安装在移动翻斗支架上,所述翻转夹袋料斗上设有轴承,所述传动机构为同步齿形带传动机构,通过与同步齿形带传动机构连接进行翻转。所述翻转夹袋料斗的轴承安装在左右两侧,使所述翻转夹袋料斗可前后翻转。还包括一水平位移机构,包括驱动部和导向部,所述驱动部包括一安装于所述机箱壳体内部后侧壁上的齿条,所述导向部包括一对安装在所述机箱壳体侧壁上的支架滑轨。所述翻转机构还包括一电机,电机设有与所述齿条配合的齿轮,所述导向部包括两根位于翻斗支架外部的支架滑轨,所述支架滑轨与机箱壳体侧壁固定。所述移动翻斗支架安装在所述支架滑轨上。
34.所述投料口处设有门框机构,包括门板和用于移动门板的滑动轨道。所述机箱壳体外侧设有显示屏、读卡器和第二摄像头,内侧设有面对垃圾桶的第一摄像头,所述垃圾桶的底部设有称重传感器。所述机箱壳体下部设有与所述垃圾桶对应的卸料门。
35.本实施例的具体安装方式包括以下步骤:
36.1、 将滑动模组6用其安装座上自带的螺钉吊挂安装在翻转夹袋料斗2的下底部。用固定螺钉8将夹袋爪7安装在翻转夹袋料斗2的滑块侧面上,两夹袋爪7是左右对称件,爪指要对向安装,以利靠紧时交叉互插嵌入,能够有效夹持投放到翻转夹袋料斗2上的湿垃圾袋。将完成上述安装的翻转夹袋料斗2的两端轴头与两个轴承4配合,再用4个连接螺钉3分别联结2个轴承4到移动翻斗支架9的两个安装台面的对应螺孔上。这样以翻转夹袋料斗2、滑动模组6、夹袋爪7为主体的夹袋机构安装到移动翻斗支架9上,并可通过轴承实现绕水平轴的自由翻转。
37.2、 将传动机构5安装到翻转夹袋料斗2和移动翻斗支架9上,电动机传动机构5的从动皮带轮安装在翻转夹袋料斗2的一侧伸出的轴头上,其带驱动皮带轮的电动机,通过4个安装螺钉14安装在移动翻斗支架9的电动机安装部位的平台侧端面上。其同步齿形带联结着驱、从动轮,在电机驱动下可以带动翻转夹袋料斗2绕其轴做翻转运动。
38.3、 将电机10通过随附的法兰螺钉安装联结在移动翻斗支架9的一边梁侧面的电机法兰上,齿轮11同轴安装装到电机10轴端,并用电机10的轴端锁紧螺丝锁紧。电机转动,齿轮转动。
39.4、 将齿条12侧卧水平安装到机箱壳体1内部后侧壁上;两个支架滑轨13通过两个安装螺钉14,水平横向安装到机箱壳体1内部左右两侧壁上,两根支架滑轨13保持必要的平行度。
40.5、 将移动翻斗支架9挂到两支架滑轨13上,并锁好移动翻斗支架9的滑动防逃脱机构,保证在电机10驱动下,齿轮11转动和齿条12啮合,使移动翻斗支架9,在支架滑轨3上来回行走滑动自如。
41.6、 将四根滑动轨道16,两根一组,通过紧定螺钉18分别安装到两个门框机构19上,两个电动丝杆滑块机构17通过紧定螺钉18分别安装到两个门框机构19上,两个门板15
分别安装到两个门框机构19上,通过螺钉与滑动轨道16和电动丝杆滑块机构17上的安装块的螺孔联结。电动丝杆滑块机构17驱动拖动门板15在滑动轨道16上可以自如的上下移动。
42.7、 将两个显示屏20分别装到两个门框机构19上。
43.8、 将装好门板15、显示屏20的门框机构19整体安装到机箱壳体1的前部竖直面上。
44.9、 两个卸料门22装到门框机构19上,铰链安装,旋转对开布置。
45.10、 完成上述机械结构安装后,进行电线、插头、开关、摄像头、触点开关、电路板等电控设备的安装。
46.11、 将两个垃圾桶21推入机箱壳体1,有对准卡槽机构保证两个垃圾桶21就位准确到位,并导入程序,联机,调试。
47.具体使用方法:
48.根据上述实施例,参见图2~9,对该实施例的使用方法做进一步说明,具体的干湿垃圾分离收集步骤如下:
49.s1、 用户将从打开的门板处将未扎紧的湿垃圾袋直接放入翻转夹袋料斗上,夹袋爪张开;
50.s2、 门板关闭,同时翻转夹袋料斗的夹袋爪收拢,将湿垃圾袋夹住;
51.s3、 传动机构通过轴承使翻转夹袋料斗翻转180
°
,使大部分的湿垃圾掉入翻转夹袋料斗下方正对的垃圾桶中;之后翻转夹袋料斗绕轴做正负30
°
的翻转,使湿垃圾袋中的湿垃圾完全进入右侧垃圾桶;
52.s4、 通过水平位移装置将翻转夹袋料斗移动至左侧垃圾桶上方;
53.s5、 翻转夹袋料斗移动至左侧垃圾桶上方到位;
54.s6、 松开夹袋爪,使垃圾袋落入左侧垃圾桶中;
55.s7、 将翻转夹袋料斗翻转180
°
,使其开口向上,并开始移动至右侧垃圾桶上方;
56.s8、 移动至右侧垃圾桶上方后,打开门板,等待下一次湿垃圾投放。
57.本实用新型还包括以下技术效果
58.1. 湿垃圾脱袋分离收集的功能
59.专门适用于收集不打结扎紧垃圾袋袋口的袋装湿垃圾,采用脱袋分离,无需破袋,并将湿垃圾统一收集,清空的垃圾袋作为废塑料垃圾单独收集回收。
60.2. 快速投递的功能
61.由于投放采用可接料的翻转夹袋料斗,投递者只要在投放口打开后,直接将垃圾袋放入翻转夹袋料斗即可转身离去,其余交给设备后续完成。不似破袋机要有个夹住垃圾袋才可放手离开的过程时间。因此具备快速投递的功能优势。
62.3. 便于投递的功能表现在以下几方面:
63.3.1 采用的翻转夹袋料斗,投放交接的手高度位置布置离下方接受掉落的湿垃圾桶的最高位置相对破袋式近很多。以往破袋式机构需要将湿垃圾袋吊起来从底部破割袋来的投放交接手位置的高度空间,在本发明的脱袋式结构中可以节省下来。使用者投递时手不需要平举到、甚至抬高过肩高来交接投放,可以做到手是在肘部高度就可以完成投放交接动作。对敞口的湿垃圾袋,用户交投体验好,没有担心垃圾渗滤液顺手臂倒流的心理压力。
64.3.2 在手可以在肘部高度投放的设计,使用者操作时是俯斜视角度观察视角,心理感受优于平举甚至高过肩部的视角操作。
65.3.3 从人体工学的分布看,可以照顾到95%的使用者的操作舒适感,并对未成年人、矮小病症者是友好的度高,解决这类人群的日常生活垃圾投放的生活必须需求。
66.4. 消除使用者恐惧心理的功能
67.解决了投递口的高度问题,带来便于使用便利的功能优势。在投放口纵深方向。以往的设备结构需要投放将手伸入投放口较多深度,需要在280~350mm的深度位置。这样的“黑洞”空间,加上机械结构,即使有很多重的机械、电控的保护措施,但使用者会有恐惧心理。本实用新型设计的干湿垃圾分离收集装置,翻转夹袋料斗,是一个斗状平台,除斗底部夹袋机构外,四周是斗壁,呈斜面状布置。使用者只要在投放口打开是将湿垃圾袋刚刚送过投放口位置,松手放下,湿垃圾袋就会顺漏斗壁的斜面自动滑落到斗底部。手只在投放口边缘处瞬间活动,不需要将手臂手肘送入机器内,没有“黑洞”效应带来的心理恐惧负担。
68.5. 减少投入时接触污染的功能
69.5.1手臂不深入,手在投放口边缘处就能将垃圾袋投放到位,可以做到投放者的衣袖不被投放口的侧壁剐蹭弄脏,避免以往设备容易将衣袖弄脏的不良体验。
70.5.2投放口深度、高度的改善,还使人的身体不至于接近机箱外壳过近,避免身体部位衣物和机箱壳体的不必要接触带来的弄脏、污染和损坏。
71.5.3上述优点除不污损投放者衣物,还避免接近闻到垃圾桶装置内的湿垃圾的腐败酸臭味道引发的不适感。
72.6. 便于安全维护功能
73.本实用新型不需要破袋机构,没有破袋刀,使用者、维修者绝无被接触破袋刀的机会,不存在被长期污染的破袋刀误划伤的机会,不会有细菌感染伤口的风险,维修人员维修环卫机械时对脏、臭、险设备的排斥度降低,工作环境改善。
74.7. 同时接受干湿两种袋装垃圾的功能
75.本实用新型设计的干湿垃圾分离收集装置,在湿垃圾桶和干垃圾桶设的上方分别设有两个投放口。除了袋装湿垃圾的脱袋分离收集过程外,干垃圾可直接在干垃圾桶上方的投放口投入,相对于单一的湿垃圾分离收集装置,效率更高,避免只有一个投放口的情况下,干垃圾只有从湿垃圾桶上方投入,再位移到干垃圾桶上方释放的多余步骤,或者是人工给予程序一个选择确认信号以跳过的脱袋和破袋的流程时对设备的不必要触摸。可以做到投放时,真正的人与装置的零触摸。
76.8. 简化机构复杂程度
77.夹紧、翻转、位移、释放一系列动作都由可在轨道上移动行走的翻转夹袋料斗机构去执行完成,不需要设立夹紧机构、转移机构、破袋机构、震荡机构等一系列机构去完成,机械机构复杂系数低,可靠性高,可维护性和使用成本都低。
78.9. 物理稳定性好
79.本实用新型设计的干湿垃圾分离收集装置,没有破袋式同类产品的高度方向方向过多的机构布局,重心可以做得低矮,运输、安放、工作时,物理稳定性较以往的产品更好,不易倾覆翻到。在小区内布放安全性更高,更加适用大风气象条件下迎风面载荷较大工况的使用场合。
80.在其他的一些实施例中,本实用新型还可能具有如下优选的技术改进:
81.1、 夹袋机构的改进
82.如图10所示,翻转夹袋料斗底部有槽口或通孔,槽口、通孔处背面藏有一对夹袋爪。通过夹袋爪的夹紧,爪刺插进并啮入垃圾袋底部,起到夹紧抱住湿垃圾袋的作用。这种底部槽孔可以使垃圾袋底部部分陷入以保证夹袋爪可以夹到足够的垃圾袋袋体底部;夹袋爪也可以是平面式、齿条式、齿轮式的其他夹紧面设计,只需将垃圾袋夹紧即可;翻转夹袋料斗的轴承也可安装在后侧,使料斗以水平方向翻转;翻转夹袋料斗可以是斗型的,也可以是无盖盒型的,甚至就是采用平板型的,其具体结构不做限制。
83.2、 水平位移机构的改进
84.如图11所示,所述水平位移机构还包括一安装在所述支架滑轨上与所述齿条连接的空袋夹爪,所述空袋夹爪位于所述翻转机构上方,来夹住再次翻转过来后的翻转夹袋料斗中的空垃圾袋,将其送往干垃圾桶上方释放、收集。
85.3、 夹袋机构中滑动模组的改进
86.在上述实施例中使用的是对向运动向的双滑块的滚珠丝杆滑动模组,在一些实施例中,也可以采用电动推杆驱动、或齿轮齿条的滑块小车驱动、油缸、气缸(杆)等其他平动执行机构来实现。
87.4、 水平位移机构驱动部的改进
88.在上述实施例中采用电机齿轮齿条啮合驱动的结构。在一些实施例中还可以采用其他形式的驱动机构,如滚珠丝杆模块、钢丝绳牵引滑动块、电动推杆机构、油缸、气缸(杆)等机构来实现。
89.5、 水平位移机构导向部的改进
90.在上述实施例中采用支架滑轨的形式进行导向,在本实施例中,参见图12和图13,是通过在移动翻斗支架底部和侧面分别设置一个支架滑轨进行导向,或是在移动翻斗支架侧面设置两个支架滑轨进行导向,在一些其他的实施例中还可以采用其他的导向结构布置形式进行导向。
91.6、 门框结构的布局设计的改进
92.在上述实施例中采用了双门双屏的布局设计,本实用新型还可以采用双门单屏、双门无屏甚至是单门单屏、单门无屏的多种可能的布局结构。
93.7、 翻转机构的改进
94.除了在上述实施例中采用了同步齿形带传动机构外,还可以选用其他的减速传动机构。
95.以上所述,仅为此实用新型的具体实施方式,但本实用新型的保护范围不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案和新型的构思加于等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1