一种码垛机械手可伸缩手臂的制作方法
1.本实用新型涉及码垛机械手技术领域,具体为一种码垛机械手可伸缩手臂。
背景技术:
2.码垛机械手能将不同外形尺寸的包装货物,整齐、自动地码〈或拆〉在托盘上〈或生产线上等),为充分利用托盘的面积和码堆物料的稳定性,机器人具有物料码垛顺序、排列设定器,可满足从低速到高速,从包装袋到纸箱,从码垛一种产品到码垛多种不同产品,应用于产品搬运、码垛等,广泛应用于汽车、物流、家电、医药、食品饮料等不同领域;现有的码垛机器手基本都是只能够旋转不能够伸缩,导致只能够对机器手周边的货物进行码垛,工作效率不是很高;因此需要一种能够伸缩的码垛机器手臂。
技术实现要素:
3.本实用新型的目的在于提供了一种码垛机械手可伸缩手臂,达到解决上述背景技术中提出的问题的目的。
4.为实现上述目的,本实用新型提供如下技术方案:一种码垛机械手可伸缩手臂,包括固定杆、伸缩机构、夹紧机构,所述伸缩机构包括电机、转动杆一、圆盘、拉绳、固定板、支撑板、弹簧、支撑杆一,所述转动杆一的一端通过联轴器与电机的输出端连接,所述转动杆一远离电机的一侧外壁与圆盘的外壁连接,所述圆盘的外壁与拉绳的一端连接,所述拉绳的另一端与固定板的外壁连接,所述固定板的外壁与支撑板的内壁连接,所述固定板的外壁与弹簧的一端连接,所述固定板的外壁与支撑杆一的外壁连接。
5.优选的,所述支撑板的外壁与固定杆的外壁连接,电机的外壁与电机箱的内壁连接,电机箱的外壁与固定杆的外壁连接,所述转动杆一的外壁与电机箱的内壁连接,所述转动杆一的一端贯穿电机箱的内壁延伸至电机箱的外部,使得转动杆一能够获得支撑力。
6.优选的,固定板的一端贯穿支撑板的外壁延伸至支撑板的外部,所述支撑板的内壁与弹簧的一端连接,使得弹簧能够给固定板提供弹力。
7.优选的,所述支撑板的外部设置夹紧机构,所述夹紧机构包括马达、转动杆二、齿轮、齿条、定位杆、定位板,所述转动杆二的一端通过联轴器与马达的输出端连接,所述转动杆二远离马达的一侧外壁与齿轮的内壁连接,使得转动杆二能够带动齿轮转动。
8.优选的,所述马达的外壁与马达箱的内壁连接,所述马达箱的外壁与定位板的外壁连接,所述转动杆二的外壁与马达箱的内壁连接,所述转动杆二的一端贯穿马达箱的外壁延伸至马达箱的外部,所述转动杆二的一端贯穿定位板的外壁延伸至定位板的内部,所述转动杆二的外壁与定位板的内壁连接,使得转动杆二能够获得支撑力。
9.优选的,所述转动杆二的一端贯穿齿轮的外壁延伸至齿轮的外部,所述齿轮与齿条啮合,所述齿条的内壁与定位杆的外壁连接,使得齿条能够获得支撑力。
10.优选的,所述定位杆的一端贯穿齿条的外壁延伸至齿条的外部,所述定位杆的外壁与定位板的内壁连接,所述齿条的外壁与挡板的外壁连接,所述挡板的外壁与定位板的
内壁连接,所述挡板的一端贯穿定位板的内壁延伸至定位板的外部,使得齿条能够带动挡板移动。
11.本实用新型提供了一种码垛机械手可伸缩手臂。具备以下有益效果:
12.(1)、本实用新型通过设置伸缩机构,通过电机带动转动杆一转动,弹簧给固定板一个向右的弹力,达到了使得机械手臂能够伸缩,可以根据使用需要对机械手臂的长度进行调节,从而增加机械手臂的作业范围的目的。
13.(2)、本实用新型通过设置夹紧机构,通过马达带动转动杆一转动,齿条带动挡板移动,达到了通过信号控制马达开启和关闭,从而对货物进行夹起和放下,从而实现了对货物进行码垛的目的。
附图说明
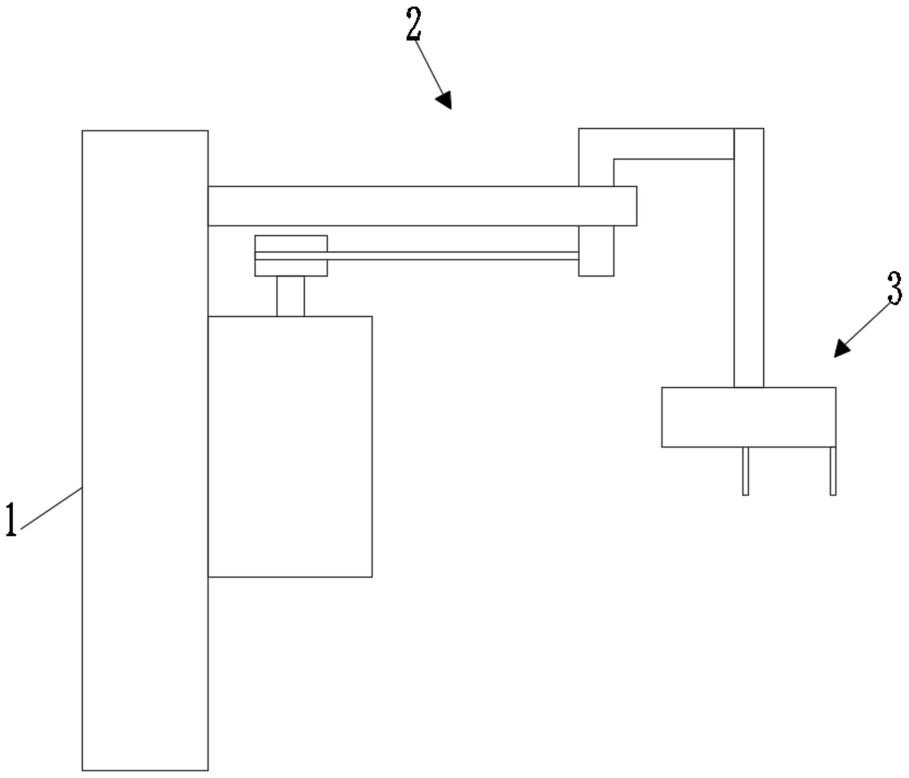
14.图1为本实用新型的正视图;
15.图2为本实用新型的正面剖视图;
16.图3为本实用新型马达的结构图;
17.图4为本实用新型弹簧的结构图。
18.图中:1固定杆、2伸缩机构、3夹紧机构、201电机、202转动杆一、203圆盘、204拉绳、205固定板、206支撑板、207弹簧、208支撑杆一、301马达、302转动杆二、303齿轮、304齿条、305定位杆。
具体实施方式
19.如图1-4所示,本实用新型提供一种技术方案:一种码垛机械手可伸缩手臂,包括固定杆1、伸缩机构2、夹紧机构3,伸缩机构2包括电机201、转动杆一202、圆盘203、拉绳204、固定板205、支撑板206、弹簧207、支撑杆一208,转动杆一202的一端通过联轴器与电机201的输出端固定连接,转动杆一202远离电机201的一侧外壁与圆盘203的外壁固定连接,圆盘203的外壁与拉绳204的一端固定连接,拉绳204的另一端与固定板205的外壁固定连接,固定板205的外壁与支撑板206的内壁滑动连接,固定板205的外壁与弹簧207的一端固定连接,固定板205的外壁与支撑杆一208的外壁固定连接,支撑板206的外壁与固定杆1的外壁固定连接,电机201的外壁与电机箱的内壁固定连接,电机箱的外壁与固定杆1的外壁固定连接,转动杆一202的外壁与电机箱的内壁通过轴承一活动连接,转动杆一202的一端贯穿电机箱的内壁延伸至电机箱的外部,固定板205的一端贯穿支撑板206的外壁延伸至支撑板206的外部,支撑板206的内壁与弹簧207的一端固定连接,通过设置伸缩机构2,通过电机201带动转动杆一202转动,转动杆一202带动圆盘203转动,圆盘203带动拉绳204移动,使得拉绳204绕在圆盘203上,拉绳204带动固定板205移动,固定板205带动支撑杆一208移动,弹簧207给固定板205一个向右的弹力,达到了使得机械手臂能够伸缩,可以根据使用需要对机械手臂的长度进行调节,从而增加机械手臂的作业范围的目的。
20.支撑板206的外部设置夹紧机构3,夹紧机构3包括马达301、转动杆二302、齿轮303、齿条304、定位杆305、定位板306,转动杆二302的一端通过联轴器与马达301的输出端固定连接,转动杆二302远离马达301的一侧外壁与齿轮303的内壁固定连接,马达301的外壁与马达箱的内壁固定连接,马达箱的外壁与定位板306的外壁固定连接,转动杆二302的
外壁与马达箱的内壁通过轴承二活动连接,转动杆二302的一端贯穿马达箱的外壁延伸至马达箱的外部,转动杆二302的一端贯穿定位板306的外壁延伸至定位板306的内部,转动杆二302的外壁与定位板306的内壁通过轴承三活动连接,转动杆二302的一端贯穿齿轮303的外壁延伸至齿轮303的外部,齿轮303与齿条304啮合,齿条304的内壁与定位杆305的外壁滑动连接,定位杆305的一端贯穿齿条304的外壁延伸至齿条304的外部,定位杆305的外壁与定位板306的内壁固定连接,齿条304的外壁与挡板的外壁固定连接,挡板的外壁与定位板306的内壁滑动连接,挡板的一端贯穿定位板306的内壁延伸至定位板的外部,通过设置夹紧机构3,通过马达301带动转动杆一302转动,转动杆一302带动齿轮303转动,齿轮303带动齿条304移动,定位杆305给齿条304提供支撑力的同时对齿条304进行限位,齿条304带动挡板移动,达到了通过信号控制马达301开启和关闭,从而对货物进行夹起和放下,从而实现了对货物进行码垛的目的。
21.在使用时,通过设置伸缩机构2,通过电机201带动转动杆一202转动,转动杆一202带动圆盘203转动,圆盘203带动拉绳204移动,使得拉绳204绕在圆盘203上,拉绳204带动固定板205移动,固定板205带动支撑杆一208移动,弹簧207给固定板205一个向右的弹力,达到了使得机械手臂能够伸缩,可以根据使用需要对机械手臂的长度进行调节,从而增加机械手臂的作业范围的目的,通过设置夹紧机构3,通过马达301带动转动杆一302转动,转动杆一302带动齿轮303转动,齿轮303带动齿条304移动,定位杆305给齿条304提供支撑力的同时对齿条304进行限位,齿条304带动挡板移动,达到了通过信号控制马达301开启和关闭,从而对货物进行夹起和放下,从而实现了对货物进行码垛的目的。
22.综上可得,尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1