一种自动落筒机用的防撞机构的制作方法
1.本实用新型涉及纺纱设备领域,具体涉及一种自动落筒机用的防撞机构。
背景技术:
2.目前,生产区域的自动化落筒机,是通过二维码及编码器定位的方式,运行到需要落筒的卷绕机处,在垂直和平行运行过程中,通过安全装置(激光防撞仪)检测周围环境,当检测到地面凸起部件时落筒机停止运行。而在生产区域中间位置规划有人员行走区和丝车摆放区,激光防撞仪检测范围以丝车摆放区和人员行走区的边界为设定点进行检测,丝车摆放区和人员行走区的边界外没有障碍物即判定安全。
3.然而,由于激光防撞仪是安装在落筒机底部的,其构成的检测面是一个矩形的水平面且距离地面仅40mm,因此其只能检测到地面上的越过边界的障碍物,而对于空中的障碍物,如:轮子位于丝车摆放区的边界内、而框架越过边界的丝车;或行走于行走区内、而手臂或其他部位越过边界的操作人员,这些在空中越过边界的障碍物无法被识别,会导致落筒车撞击丝车和人员,造成设备损坏和人员受伤。
技术实现要素:
4.本实用新型的目的是克服现有技术的不足,提供一种自动落筒机用的防撞机构。
5.为达到上述目的,本实用新型采用的技术方案是:
6.一种自动落筒机用的防撞机构,所述自动落筒机包括落筒机本体、两个分别位于所述落筒机本体两侧的框架,所述防撞机构包括两个分别万向连接于所述的两个框架上的连接件、两根分别可活动的插设于所述的两个连接件中的轴杆、两端分别与所述的两根轴杆相连接的触发杆、设于所述触发杆上的目标模块、设于至少一个所述框架上的用于检测所述目标模块的传感模块。
7.优选地,所述触发杆位于所述的两个框架下方。
8.进一步优选地,所述防撞机构还包括两个分别开设于所述的两个连接件上的第一连接孔,所述的两根轴杆上端分别可活动的穿设于所述的两个第一连接孔中。
9.更进一步优选地,所述防撞机构还包括两个分别一一对应的搭设于所述的两个连接件上的限位件,所述轴杆穿出所述第一连接孔并与所述限位件相连接。
10.更进一步优选地,所述限位件包括与所述轴杆同轴连接的限位杆、设于所述限位杆端部且能够配合的压抵于所述连接件上的限位头,所述限位头的径向截面成圆形且其直径大于所述第一连接孔的孔径。
11.更进一步优选地,所述防撞机构还包括两个分别开设于所述触发杆两端部的第二连接孔,所述的两根轴杆下端分别插设于所述的两个第二连接孔中。
12.优选地,所述目标模块包括设于所述触发杆一端部的距离感应板,所述传感模块包括设于所述的两个框架中靠近所述距离感应板的所述框架上的漫反射传感器,所述漫反射传感器位于所述距离感应板的上方且朝向所述距离感应板设置。
13.进一步优选地,所述目标模块还包括设于所述触发杆另一端部的反射镜片,所述传感模块还包括设于所述的两个框架中靠近所述反射镜片的所述框架上的镜片检测传感器,所述镜片检测传感器位于所述反射镜片的上方且朝向所述反射镜片设置。
14.更进一步优选地,所述防撞机构还包括两个分别设于所述的两个框架上的支架,所述漫反射传感器和所述镜片检测传感器分别安装于所述的两个支架上。
15.更进一步优选地,所述支架包括贴合于所述框架上的固定板、一端连接于所述固定板上的延长板、连接于所述延长板另一端的安装板,所述固定板与所述安装板相平行且与所述延长板相垂直,所述漫反射传感器和所述镜片检测传感器分别连接于两个所述的安装板上。
16.由于上述技术方案的运用,本实用新型与现有技术相比具有下列优点:本实用新型的防撞机构,通过触发杆和传感模块的设置,在自动落筒机下落的过程中,触发杆能够先于自动落筒机接触到障碍物,并通过传感模块向自动落筒机发送急停信号,从而防止自动落筒机撞击障碍物,如此,不仅避免了设备的损坏,而且也提升了落筒效率,保证了人员安全。
附图说明
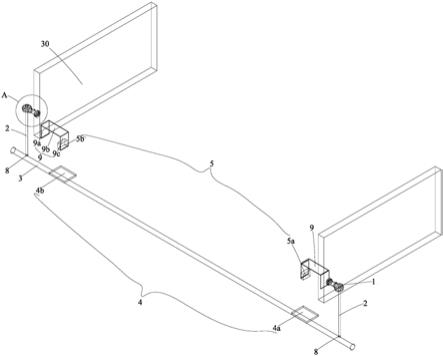
17.附图1为本实用新型的具体实施例中的防撞机构的结构示意图;
18.附图2为附图1中a处放大示意图;
19.附图3为本实用新型的具体实施例中的防撞机构在障碍物位于正下方时的运动状态示意图;
20.附图4为本实用新型的具体实施例中的防撞机构在障碍物位于斜下方时的运动状态示意图。
21.图中:1、连接件;2、轴杆;3、触发杆;4、目标模块;4a、距离感应板;4b、反射镜片;5、传感模块;5a、漫反射传感器;5b、镜片检测传感器;6、第一连接孔;7、限位件;7a、限位杆;7b、限位头;8、第二连接孔;9、支架;9a、固定板;9b、延长板;9c、安装板;
22.30、框架;31、障碍物。
具体实施方式
23.下面结合附图来对本实用新型的技术方案作进一步的阐述。
24.本实用新型涉及对自动落筒机的防撞技术的改进,提出了一种防撞机构,该机构通过触发杆3和传感模块5的设置,在自动落筒机下落的过程中,触发杆3能够先于自动落筒机接触到障碍物31,并通过传感模块5向自动落筒机发送急停信号,从而防止自动落筒机撞击障碍物31。
25.参见图1-4所示,自动落筒机包括落筒机本体(图中未示出)、两个分别位于落筒机本体两侧的框架30,防撞机构包括两个分别万向连接于两个框架30上的连接件1、两根分别可活动的插设于两个连接件1中的轴杆2、两端分别与两根轴杆2相连接的触发杆3、设于触发杆3上的目标模块4、设于至少一个框架30上的用于检测目标模块4的传感模块5。其中,触发杆3位于两个框架30下方。
26.如此,在自动落筒机下落的过程中,触发杆3能够先于自动落筒机接触到障碍物31
并在障碍物31的作用下产生位置偏移,使得设置在触发杆3上的目标模块4产生位置改变,导致传感模块5无法正常检测到目标模块4从而向自动落筒机发送急停信号,随后自动落筒机紧急停止并发出声光报警,待操作人员移除障碍物31后,触发杆3在重力的作用下复位,传感模块5能够正常检测到目标模块4从而实现信号复原,最后操作人员再次启动自动落筒机,使其恢复运行。
27.本例中,连接件1为关节轴承,其安装于框架30上且能万向转动;轴杆2长度为100mm,其插设于关节轴承中且能够沿着竖直方向运动;触发杆3为1260mm长度的pvc材质的弹性软管,可以保证接触撞击后能够利用自身的弹性快速复原,反复使用。
28.进一步地,结合图2所示,防撞机构还包括两个分别开设于两个连接件1上的第一连接孔6、两个分别一一对应的搭设于两个连接件1上的限位件7,两根轴杆2上端分别可活动的穿设于两个第一连接孔6中且其穿出第一连接孔6的一端与限位件7相连接
29.当轴杆2向上运动时,限位件7跟着轴杆2向上运动;而当轴杆2向下运动至相应位置时,限位件7能够抵住连接件1,从而防止轴杆2继续向下运动,避免轴杆2自连接件1中向下掉落。如此,通过限位件7的设置,既能够保证轴杆2能够自由的上下运动,又能够避免轴杆2自连接件1中向下掉落。
30.进一步地,限位件7包括与轴杆2同轴连接的限位杆7a、设于限位杆7a端部且能够配合的压抵于连接件1上的限位头7b,限位头7b的径向截面成圆形且其直径大于第一连接孔6的孔径。本例中,限位件7为螺帽且其帽头的直径大于第一连接孔6的孔径。
31.防撞机构还包括两个分别开设于触发杆3两端部的第二连接孔8,两根轴杆2下端分别插设于两个第二连接孔8中。这里,第二连接孔8的孔径为9mm,分别开设于触发杆3上距离两端边缘20mm处,将轴杆2下端插入第二连接孔8后可通过常规的紧固件固定,在此不赘述。
32.在本实施例中,目标模块4包括设于触发杆3一端部的距离感应板4a、设于触发杆3另一端部的反射镜片4b,传感模块5包括设于两个框架30中靠近距离感应板4a的框架30上的漫反射传感器5a、设于两个框架30中靠近反射镜片4b的框架30上的镜片检测传感器5b,漫反射传感器5a位于距离感应板4a的上方且朝向距离感应板4a设置,镜片检测传感器5b位于反射镜片4b的上方且朝向反射镜片4b设置。这里的距离感应板4a和反射镜片4b均为外购,具体材质不赘述,可根据需要灵活选用。
33.如此,结合图3所示,当障碍物31位于触发杆3正下方时,触发杆3与障碍物31正面撞击,此时触发杆3和两根轴杆2在撞击力的作用下同步向上运动,使得距离感应板4a与漫反射传感器5a之间的距离减小,触发杆3上升一定距离后,距离感应板4a与漫反射传感器5a之间的距离达到报警距离,此时漫反射传感器5a发出控制信号,经中间继电器中转后向自动落筒机发出急停报警信号,自动落筒机紧急停止;
34.结合图4所示,而当障碍物31位于触发杆3斜下方时,触发杆3与障碍物31斜向撞击,此时基于关节轴承的万向原理,触发杆3和两根轴杆2在撞击力的左右下同步倾斜上升,倾斜一定角度后,反射镜片4b脱离镜片检测传感器5b的检测范围,使得镜片检测传感器5b和反射镜片4b无法对射,此时镜片检测传感器5b发出控制信号,经中间继电器中转后向自动落筒机发出急停报警信号,自动落筒机紧急停止。
35.在本实施例中,防撞机构还包括两个分别设于两个框架30上的支架9,漫反射传感
器5a和镜片检测传感器5b分别安装于两个支架9上。
36.进一步地,支架9包括贴合于框架30上的固定板9a、一端连接于固定板9a上的延长板9b、连接于延长板9b另一端的安装板9c,固定板9a与安装板9c相平行且与延长板9b相垂直,漫反射传感器5a和镜片检测传感器5b分别连接于两个安装板9c上。
37.以下具体阐述下本实施例的工作过程:
38.在自动落筒机下落的过程中,触发杆3能够先于自动落筒机接触到障碍物31并在障碍物31的作用下产生位置偏移,使得设置在触发杆3上的目标模块4产生位置改变,导致传感模块5无法正常检测到目标模块4从而向自动落筒机发送急停信号,随后自动落筒机紧急停止并发出声光报警,待操作人员移除障碍物31后,触发杆3在重力的作用下复位,传感模块5能够正常检测到目标模块4从而实现信号复原,最后操作人员再次启动自动落筒机,使其恢复运行。
39.上述实施例只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本实用新型的内容并据以实施,并不能以此限制本实用新型的保护范围。凡根据本实用新型精神实质所作的等效变化或修饰,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1