一种衬套柔性取料装置的制作方法
1.本实用新型涉及衬套上料技术领域,更具体地说,涉及一种衬套柔性取料装置。
背景技术:
2.衬套用于在进行打螺丝时与螺丝配合使用,在日常的生活中以及工业生产中存在较多的应用;目前对衬套取料大都直接进行夹持,缺少有效的定位手段,设备受损风险较大。
技术实现要素:
3.本实用新型要解决的技术问题在于,针对现有技术的上述缺陷,提供一种衬套柔性取料装置。
4.本实用新型解决其技术问题所采用的技术方案是:
5.构造一种衬套柔性取料装置,其中,包括气动夹爪、带动所述气动夹爪升降的升降组件、定位组件和带动所述升降组件以及所述定位组件升降的升降单元;所述气动夹爪的夹持端朝下设置,所述定位组件包括定位叉和为所述定位叉提供纵向回弹力的弹性件;所述定位叉与所述气动夹爪的夹持端并排设置,所述定位叉下端设置有定位槽,所述定位槽与所述气动夹爪的两个夹臂打开时的中间间隙相对应。
6.本实用新型所述的衬套柔性取料装置,其中,所述升降组件包括升降气缸,所述升降气缸的活动端通过连接板连接所述气动夹爪。
7.本实用新型所述的衬套柔性取料装置,其中,所述升降气缸为滑台气缸,所述滑台气缸、所述气动夹爪以及所述定位叉均位于所述连接板的同一侧。
8.本实用新型所述的衬套柔性取料装置,其中,所述定位组件包括套设在所述定位叉上的导向套,所述定位叉的上端设置有支杆,所述弹性件为弹簧,且弹簧的一端连接所述支杆,弹簧的另一端连接所述导向套。
9.本实用新型所述的衬套柔性取料装置,其中,所述支杆和所述弹簧构成一组单元,该单元设置有两组且分别位于所述定位叉的两侧。
10.本实用新型所述的衬套柔性取料装置,其中,所述衬套柔性取料装置还包括安装所述导向套和所述升降组件的安装座,所述安装座由所述升降单元带动升降。
11.本实用新型的有益效果在于:加工时,升降组件带动气动夹爪下行一段距离,升降单元带动升降组件以及定位组件下行,定位叉先依靠下端的定位槽与供料设备的定位销配合进行定位,而后对定位销进行压持,弹性件受力形变,当气动夹爪到达夹持位置时,气动夹爪运行夹持衬套,取料运动时采用先柔性定位后夹持取料的方式,能够有效的降低设备受损几率。
附图说明
12.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将结合附图及实
施例对本实用新型作进一步说明,下面描述中的附图仅仅是本发明的部分实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他附图:
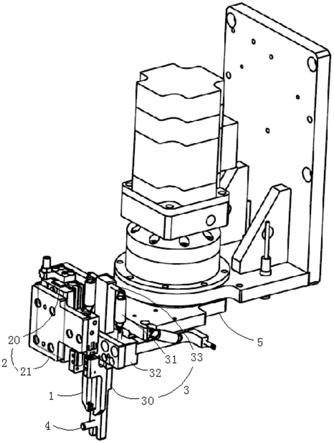
13.图1是本实用新型较佳实施例的衬套柔性取料装置结构示意图。
具体实施方式
14.为了使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本实用新型的部分实施例,而不是全部实施例。基于本发明的实施例,本领域普通技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型的保护范围。
15.本实用新型较佳实施例的衬套柔性取料装置,如图1所示,包括气动夹爪1、带动气动夹爪1升降的升降组件2、定位组件3和带动升降组件2以及定位组件3升降的升降单元(图中未显示);气动夹爪1的夹持端朝下设置,定位组件3包括定位叉30和为定位叉30提供纵向回弹力的弹性件31;定位叉30与气动夹爪1的夹持端并排设置,定位叉30下端设置有定位槽,定位槽与气动夹爪1的两个夹臂打开时的中间间隙相对应;
16.加工时,升降组件2带动气动夹爪1下行一段距离,升降单元带动升降组件2以及定位组件3下行,定位叉30先依靠下端的定位槽与供料设备的定位销4配合进行定位,而后对定位销4进行压持,弹性件31受力形变,当气动夹爪1到达夹持位置时,气动夹爪1运行夹持衬套,取料运动时采用先柔性定位后夹持取料的方式,能够有效的降低设备受损几率。
17.优选的,升降组件2包括升降气缸20,升降气缸20的活动端通过连接板21连接气动夹爪1;结构简洁,安装方便。
18.优选的,升降气缸20为滑台气缸,滑台气缸、气动夹爪1以及定位叉30均位于连接板21的同一侧;结构合理且极为紧凑,整体体积可以做到较小,有益于节约加工空间。
19.优选的,定位组件3包括套设在定位叉30上的导向套32,定位叉30的上端设置有支杆33,弹性件为弹簧,且弹簧的一端连接支杆33,弹簧的另一端连接导向套32;结构简洁,体积小,且弹簧的装配十分方便。
20.优选的,支杆33和弹簧构成一组单元,该单元设置有两组且分别位于定位叉30的两侧;便于保障受力的平衡,避免因侧向力带来的滑动卡死情况。
21.优选的,衬套柔性取料装置还包括安装导向套和升降组件的安装座5,安装座5由升降单元带动升降;整体性好,装配方便。
22.应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本实用新型所附权利要求的保护范围。
技术特征:
1.一种衬套柔性取料装置,其特征在于,包括气动夹爪、带动所述气动夹爪升降的升降组件、定位组件,和带动所述升降组件以及所述定位组件升降的升降单元;所述气动夹爪的夹持端朝下设置,所述定位组件包括定位叉和为所述定位叉提供纵向回弹力的弹性件;所述定位叉与所述气动夹爪的夹持端并排设置,所述定位叉下端设置有定位槽,所述定位槽与所述气动夹爪的两个夹臂打开时的中间间隙相对应。2.根据权利要求1所述的衬套柔性取料装置,其特征在于,所述升降组件包括升降气缸,所述升降气缸的活动端通过连接板连接所述气动夹爪。3.根据权利要求2所述的衬套柔性取料装置,其特征在于,所述升降气缸为滑台气缸,所述滑台气缸、所述气动夹爪以及所述定位叉均位于所述连接板的同一侧。4.根据权利要求1-3任一所述的衬套柔性取料装置,其特征在于,所述定位组件包括套设在所述定位叉上的导向套,所述定位叉的上端设置有支杆,所述弹性件为弹簧,且弹簧的一端连接所述支杆,弹簧的另一端连接所述导向套。5.根据权利要求4所述的衬套柔性取料装置,其特征在于,所述支杆和所述弹簧构成一组单元,该单元设置有两组且分别位于所述定位叉的两侧。6.根据权利要求4所述的衬套柔性取料装置,其特征在于,所述衬套柔性取料装置还包括安装所述导向套和所述升降组件的安装座,所述安装座由所述升降单元带动升降。
技术总结
本实用新型涉及衬套柔性取料装置,包括气动夹爪、带动气动夹爪升降的升降组件、定位组件和带动升降组件以及定位组件升降的升降单元;气动夹爪的夹持端朝下设置,定位组件包括定位叉和为定位叉提供纵向回弹力的弹性件;定位叉与气动夹爪的夹持端并排设置,定位叉下端设置有定位槽,定位槽与气动夹爪的两个夹臂打开时的中间间隙相对应;升降组件带动气动夹爪下行一段距离,升降单元带动升降组件以及定位组件下行,定位叉先依靠下端的定位槽与供料设备的定位销配合进行定位,而后对定位销进行压持,弹性件受力形变,当气动夹爪到达夹持位置时,气动夹爪运行夹持衬套,取料运动时采用先柔性定位后夹持取料的方式,能够有效的降低设备受损几率。备受损几率。备受损几率。
技术研发人员:谭竣文 周华国 廖建勇
受保护的技术使用者:深圳市合力士机电设备有限公司
技术研发日:2021.10.28
技术公布日:2022/4/13
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1