集装箱码头自动化场桥的制作方法
1.本实用新型涉及场桥技术领域,特别是涉及一种新型的集装箱码头自动化场桥。
背景技术:
2.场桥作为一种将集装箱在集卡和堆场指定箱位之间装卸搬运的设备,在集装箱码头的生产作业过程中起着极其重要的作用。集装箱码头的堆场通常由多个箱区组成,每个箱区中有多个贝位,奇数贝为20英尺贝,相邻的两个20英尺贝可以放一个40英尺的集装箱,标示为偶数贝。目前,每个箱区的集装箱堆存作业是靠轮胎式龙门起重机(rtgc)或轨道式龙门起重机(rmgc)来完成的。rmgc在箱区两侧的通道上各有一排轮子,它是通过安装在每个箱区的轨道来移动的,其允许建造更多的存储排,来获得更高的存储能力。rtgc跨越一个箱区,靠橡胶轮胎移动,虽然它的空间存储能力比较低,但是rtgc能够在各箱区之间方便行走,调度更加灵活。正因为如此,许多集装箱码头仍然把轮胎吊作为场地机械的首选。一般情况下,使用轮胎吊的箱区有六排,可以堆垛四层集装箱。每个集装箱堆放的箱位用“箱区、贝、排、层”来编码表示。
3.当场桥需要转场,也就是从一个箱区移动到另一个箱区时,要遵循一定的路线。由于场桥的尺寸较大以及移动速度较慢,因此他们的转弯作业移动很可能会长时间占据大量的道路空间,从而导致堆场内交通堵塞以及堆场内其它的作业的耽搁,导致场桥作业效率的下降。在实际的码头堆存作业中,场桥转场次数比较多,经常会碰到两台场桥可能发生碰撞的情况。在箱区作业量很大的情况下,会先后调度两台场桥在同一箱区内同时作业,而在调度的过程中也经常会遇到场桥之间相互碰撞的问题。场桥之间相互碰撞的话,其中一台场桥就必须停下来,在一旁等待,这样就浪费了本应该进行作业的时间,降低了场桥的作业效率。
技术实现要素:
4.本实用新型的目的是针对现有技术中存在的技术缺陷,而提供一种集装箱码头自动化场桥。
5.为实现本实用新型的目的所采用的技术方案是:
6.一种集装箱码头自动化场桥,包括场桥本体,所述场桥本体具有龙门架以及位于两侧的两组轮胎式行走轮,所述龙门架上安装有能水平移动并升降的吊具,每组所述轮胎式行走轮包括两对行走轮,两对所述行轮相对间隔开沿移动方向前后布置,其特征在于,每组所述轮胎式行走轮的前端以及后端分别布置有大车防撞装置,所述大车防撞装置的上方布置有喇叭音频装置,所述龙门架的两侧分别布置有大车行走视频装置,在轮胎式行走轮的每对行走轮上方布置有大车纠偏装置。
7.优选的,在每对行走轮上方外侧布置有大车转场视频装置,以在场桥转场移动过程中采集相关视频。
8.优选的,在场桥的外侧分别布置有大车定位装置。
9.优选的,所述龙门架的横梁的下方在一侧的侧架上设有层高扫描装置,以扫描集装箱的层高。
10.优选的,所述龙门架的横梁的近端部的顶端设置有gps定位装置。
11.优选的,所述龙门架的横梁的端部布置有全景视频采集装置。
12.优选的,所述龙门架的横梁的下方设置有作业扫描视频装置。
13.本实用新型的集装箱码头自动化场桥,通过在设备上布置多种装置,实现对场桥的工作的远程定位及控制,方便远程控制使用,保证了作业的安全。
附图说明
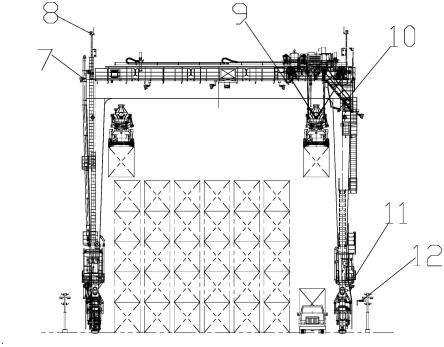
14.图1是本实用新型的集装箱码头自动化场桥的整体主视示意图。
15.图2为图1的局部示意图。
16.图3为本实用新型的集装箱码头自动化场桥的整体侧视示意图。
17.图4为图3的局部放大示意图。
18.图5为图1的局部放大示意图。
19.图6为图3的局部放大示意图。
具体实施方式
20.以下结合附图和具体实施例对本实用新型作进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
21.如图1-图6所示,本实用新型实施例的一种集装箱码头自动化场桥,包括场桥本体,所述场桥本体具有龙门架14以及位于两侧的两组轮胎式行走轮14,所述龙门架上安装有能水平移动并升降的吊具16,每组所述轮胎式行走轮包括两对行走轮,两对所述行轮相对间隔开沿移动方向前后布置,每组所述轮胎式行走轮的前端以及后端分别布置有大车防撞装置1,所述大车防撞装置的上方布置有喇叭音频装置2,所述龙门架的两侧分别布置有大车行走视频装置,包括前行走视频装置3以及后行走视频装置5,在轮胎式行走轮的每对行走轮上方布置有大车纠偏装置6。
22.通过大车防撞装置,可以有效防止在车移动行走过程中发生碰撞,通过设置有喇叭音频装置可以发布音频,向周围的人发出大车移动请小心的警告或其它工作用音频,通过所述的大车行走视频装置,可以采集大车行走过程中的两侧的场景的视频,以方便远程的监控中心掌握相关的环境,通过所述在大车纠偏装置,可以实现对大车的移动的纠偏,防止偏离预定的行走路线。
23.每个所述的大车纠偏装置可以采用现有激光纠偏装置或技术来实现。激光纠偏装置为现有技术,具体请参考cn200820141913.5所公开的技术,不再赘述。
24.其中,所述的大车防撞装置包括一个防撞雷达,安装在支架上,支架安装在大车上,通过雷达实现防撞的功能。当大车朝前或后行驶时,防撞雷达可实时检测行驶方向的障碍物,并及时将检测信号传送给本地计算机。根据该检测信号,当检测到预定范围内的障碍物时,本地计算机控制大车减速,当检测到另一个预定范围以内存在障碍物时,则控制大车紧急停车。
25.作为一个可选的实施例,在每对行走轮上方外侧布置有大车转场视频装置11,以
场桥转场移动过程中采集相关视频,以方便通过远程观察大车转场的情况,采集周边视频图像。
26.作为一个可选的实施例,在场地上于场桥的行走路线的外侧分别布置有大车定位装置12,该大车定位装置可以是摄像头,可以是通过采集大车侧面的预定装置的图像,实现对大车的定位。
27.优选的,所述的大车定位装置采用二维码定位相机,安装在大车的取电小车架上,相机镜头距离外侧的排架13水平方向10公分上下,相对于排架居中,排架13上每个贝位贴二维码板,用于相机采集定位。
28.作为一个可选的实施例,所述龙门架的横梁的下方在一侧的侧架上设有层高扫描视频装置10,以扫描集装箱的层高,将扫描视频发送到远程监控中心,以实时掌握集装箱的层高情况。
29.作为一个可选的实施例,所述龙门架的横梁的近端部的顶端设置有gps定位装置8,以对大车的位置进行定位,确定其位置。
30.作为一个可选的实施例,所述龙门架的横梁的端部布置有全景视频采集装置7,用于采集大车周围的全景视频,以供监控中心使用。
31.作为一个可选的实施例,所述龙门架的横梁的下方设置有作业扫描视频装置9,用于在大车进行吊箱作业时采集作业视频,掌握吊箱作业过程。
32.作为一个可选的实施例,在所述龙门架的侧面上还可以设有集卡引导雷达4,用于对作业的集卡进行作业引导。集卡引导雷达4,可以是通过扫描集卡的轮廓,确定集卡的位置,给出集卡需要前进和后退移动的距离,帮助集卡的司机调整集卡位置,引导集卡移动到预定的位置进行作业。
33.本实用新型的集装箱码头自动化场桥,通过在设备上布置多种装置,实现对场桥的工作的远程定位及控制,方便远程控制使用,保证了作业的安全。
34.以上所述仅是本实用新型的优选实施方式,应当指出的是,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1