一种垃圾袋自动打包结构及智能垃圾桶的制作方法
1.本实用新型属于智能家居技术领域,具体涉及一种垃圾袋自动打包结构及智能垃圾桶。
背景技术:
2.垃圾桶是居家生活中的必备用品,通常需要配合垃圾袋使用,传统的垃圾桶在取出垃圾袋时,一般需要人工对垃圾袋进行打包,且通常无法实现良好的收口,取出的打包后的垃圾袋在移动过程中,还会从收口不良的垃圾袋口部漏出,造成垃圾的外漏,因此用户的体验感较差。
技术实现要素:
3.本实用新型的目的在于提供一种垃圾袋自动打包结构及智能垃圾桶,以解决背景技术中提出的技术问题。
4.为了实现上述目的,本实用新型公开了一种垃圾袋自动打包结构,设于垃圾桶的桶盖上,在桶盖的中心位置处设有垃圾投放孔,在桶盖下方围绕垃圾投放孔的四个边角位置处分别依次固定设有第一齿轮箱、第二齿轮箱、第三齿轮箱和第四齿轮箱;
5.在第一齿轮箱中设有电机,在第一齿轮箱与第二齿轮箱之间传动连接有第一同步带,在第二齿轮箱与第三齿轮箱之间传动连接有第二同步带,在第一齿轮箱与第四齿轮箱之间传动连接有第三同步带;
6.在第一同步带上依次垂直啮合连接有第一压杆和第二压杆,第一压杆和第二压杆自第一同步带垂直延伸至与第一同步带相对应的垃圾投放孔的另一侧;
7.在第二同步带和第三同步带之间啮合连接有第三压杆,第三压杆的两端分别与第二同步带和第三同步带连接。
8.进一步地,在设有第一同步带一侧的桶盖下方固定设有加热陶瓷座。优选地,加热陶瓷座固定在桶盖下方的中部。
9.进一步地,在桶盖的下方位于第一同步带的内部固定设有第一导杆,第一压杆和第二压杆滑动穿设在第一导杆上。
10.进一步地,第一压杆与第一同步带上远离垃圾投放孔的一侧啮合,第二压杆与第一同步带上靠近垃圾投放孔的一侧啮合。
11.进一步地,在桶盖的下方位于第二同步带的内部固定设有第二导杆,在桶盖的下方位于第三同步带的内部固定设有第三导杆,第三压杆的一端滑动穿设于第二导杆上,另一端滑动穿设于第三导杆上;滑动穿设于第二导杆上的第三压杆的一端与第二同步带上远离垃圾投放孔的一侧啮合,滑动穿设于第三导杆上的第三压杆的一端与第三同步带上靠近垃圾投放孔的一侧啮合。
12.进一步地,所述第一齿轮箱内设有第一同步轮,第二齿轮箱内设有第二同步轮,第三齿轮箱内设有第三同步轮,第四齿轮箱内设有第四同步轮;所述第一同步轮包括互相啮
合的第一左侧同步轮和第一右侧同步轮,第一左侧同步轮与电机的输出轴啮合;第二同步轮包括互相啮合的第二左侧同步轮和第二右侧同步轮,第一同步带传动连接在第一左侧同步轮和第二左侧同步轮之间,第二同步带传动连接在第二右侧同步轮和第三同步轮之间,第三同步带传动连接在第一右侧同步轮和第四同步轮之间。
13.进一步地,第一左同步轮、第一右同步轮、第二左同步轮和第二右同步轮上的啮合齿轮包括一体成型的上下两部分;其中第一左同步轮的下部与电机的输出轴啮合连接,并与第一右同步轮的下部啮合连接,第二左同步轮的下部与第二右同步轮的下部啮合连接;第一同步带与第一左同步轮的上部和第二左同步轮的上部传动连接,第二同步带与第二右同步轮的上部和第三同步轮传动连接,第三同步带与第一右同步轮的上部和第四同步轮传动连接。
14.本实用新型同时要求保护一种智能垃圾桶,包括所述的垃圾袋自动打包结构,所述智能垃圾桶包括桶体,设有垃圾袋自动打包结构的桶盖铰接在桶体上。
15.本实用新型的智能垃圾桶具有垃圾袋自动打包功能,在使用时,通过垃圾投放孔可向智能垃圾桶的桶体内投放垃圾,当需要对垃圾袋进行打包时,电机启动,驱动第一压杆、第二压杆和第三压杆带动垃圾袋的上边沿向加热陶瓷座的位置移动,然后加热陶瓷座对收紧到其位置处的垃圾袋进行加热熔融粘接,然后打开桶盖,取出即可;随后电机启动反转,带动第一压杆、第二压杆和第三压杆归位。
16.与现有技术相比,本实用新型的垃圾袋自动打包结构及智能垃圾桶具有如下优点:
17.(1)本实用新型中,垃圾袋自动打包结构设置于桶盖下方,通过电机驱动第一压杆、第二压杆和第三压杆的运动实现垃圾袋的自动打包,打包完成后,第一压杆、第二压杆和第三压杆自动归位,不影响垃圾的正常投放,使用方便。
18.(2)本实用新型中,垃圾袋自动打包结构中还设有加热陶瓷座,可对垃圾袋进行加热熔融粘接,即可对垃圾袋进行良好的收口,在对垃圾袋进行转移的过程中,垃圾不会外漏,用户体验感良好。
19.(3)本实用新型中,智能垃圾桶的桶体结构不受限制,只需要将设有垃圾袋自动打包结构的桶盖铰接在桶体上即可,适用范围广。
附图说明
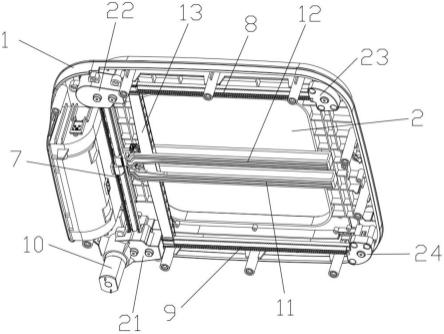
20.图1:实施例1中垃圾袋自动打包结构的立体结构示意图。
21.图2:实施例1中垃圾袋自动打包结构省略齿轮箱箱体外壳的立体结构示意图。
22.图3:实施例1中垃圾袋自动打包结构省略齿轮箱箱体外壳的仰视结构示意图。
23.图4:图2中区域a的局部放大图。
24.图5:图2中区域c的局部放大图。
25.图6:图2中区域b的局部放大图。
26.图7:图3中区域d的局部放大图。
27.图8:图3中区域e的局部放大图。
28.图9:图3中区域f的局部放大图。
29.其中:1、桶盖;2、垃圾投放孔;21、第一齿轮箱;22、第二齿轮箱; 23、第三齿轮箱;
24、第四齿轮箱;3、第一同步轮;4、第二同步轮;5、第三同步轮;6、第四同步轮;7、第一同步带;8、第二同步带;9、第三同步带;10、电机;31、第一左同步轮;32、第一右同步轮;41、第二左同步轮; 42、第二右同步轮;11、第一压杆;12、第二压杆;13、第三压杆;14、第一导杆;15、第二导杆;16、第三导杆;17、加热陶瓷座。
具体实施方式
30.下面通过具体实施例进行详细阐述,说明本实用新型的技术方案。
31.实施例1
32.一种垃圾袋自动打包结构,设于垃圾桶的桶盖1上,垃圾桶的桶盖1为方形结构,桶盖1的中心位置处设有垃圾投放孔2,垃圾投放孔2为通孔。
33.在桶盖1下方围绕垃圾投放孔2的四个边角位置处设有齿轮箱,齿轮箱包括分别依次固定设有第一齿轮箱21、第二齿轮箱22、第三齿轮箱23和第四齿轮箱24。
34.为了更好地展示产品结构,图2给出了省略了齿轮箱箱体外壳的结构示意图,从图2中可看出,在第一齿轮箱21内设有第一同步轮3,第二齿轮箱 22内设有第二同步轮4,第三齿轮箱23内设有第三同步轮5,第四齿轮箱24 内设有第四同步轮6;第一同步轮3包括互相啮合的第一左同步轮31和第一右同步轮32,第二同步轮4包括互相啮合的第二左同步轮41和第二右同步轮42。
35.在桶盖1下方与第一同步轮3相邻的位置处固定设有电机10,电机10 的输出轴与第一左同步轮31啮合,在第一左同步轮31与第二左同步轮41之间传动连接有第一同步带7,在第二右同步轮42与第三同步轮5之间传动连接有第二同步带8,在第一右同步轮32与第四同步轮6之间传动连接有第三同步带9。
36.第一左同步轮31、第一右同步轮32、第二左同步轮41和第二右同步轮 42上的啮合齿轮包括一体成型的上下两部分,其中第一左同步轮31的下部与电机10的输出轴啮合连接,并与第一右同步轮32的下部啮合连接,第二左同步轮41的下部与第二右同步轮42的下部啮合连接。
37.第一同步带7传动连接在第一左同步轮31的上部和第二左同步轮41的上部,第二同步带8传动连接在第二右同步轮42的上部和第三同步轮5上,第三同步带9传动连接在第一右同步轮32的上部和第四同步轮6上。
38.在桶盖1的下方位于第一同步带7的内部固定设有第一导杆14,在第一导杆14上滑动穿设有第一压杆11和第二压杆12,第一压杆11的端部设有啮合槽,第一压杆11端部的啮合槽与第一同步带7上远离垃圾投放孔2的一侧啮合,第二压杆12的端部也设有啮合槽,第二压杆12端部的啮合槽与第一同步带7上靠近垃圾投放孔2的一侧啮合,第一压杆11和第二压杆12均与第一导杆14垂直设置,第一压杆11和第二压杆12自第一同步带7垂直延伸至与第一同步带7相对应的垃圾投放孔2的另一侧。
39.在桶盖1的下方位于第二同步带8的内部固定设有第二导杆15,在桶盖1的下方位于第三同步带9的内部固定设有第三导杆16,在第三导杆16和第四导杆之间垂直滑动连接有第三压杆13,第三压杆13的一端滑动穿设在第二导杆15上,且第三压杆13的本侧端部设有啮合槽,与第二同步带8上远离垃圾投放孔2的一侧啮合;第三压杆13的另一端滑动穿设在第三导杆16 上,且第三压杆13的本侧端部也设有啮合槽,与第三同步带9上靠近垃圾投
放孔2的一侧啮合。
40.在设有第一同步带7一侧的桶盖1下方中部固定设有加热陶瓷座17。
41.实施例2
42.一种智能垃圾桶,使用了实施例1中给出的垃圾袋自动打包结构,设有该垃圾袋自动打包结构的桶盖1铰接在垃圾桶桶体上,即构成了智能垃圾桶,智能垃圾桶在正常使用时,电机10电动第一压杆11位于设有第三同步带9 一侧的桶盖1下方,第二压杆12位于设有第二同步带8一侧的桶盖1下方,第三压盖位于相对于第一同步带7一侧的桶盖1下方,设置在桶盖1中心位置处的垃圾投放孔2与垃圾桶的桶体内侧相连通,用户可正常通过垃圾投放孔2投放垃圾。
43.当需要对智能垃圾桶的垃圾袋进行打包时,按如下步骤进行:
44.(1)启动电机10,电机10输出轴逆时针转动,带动第一左同步轮31 和第一右同步轮32分别顺时针和逆时针转动,
45.(2)第一左同步轮31通过第一同步带7带动第二左同步轮41均顺时针转动,第一同步带7的顺时针转动分别带动第一压杆11和第二压杆12向加热陶瓷座17靠近,同时第一压杆11和第二压杆12带动套设在垃圾桶桶体上的垃圾袋向加热陶瓷座17靠近;
46.(3)第二左同步轮41的顺时针转动带动第二右同步轮42进行逆时针转动,进而带动第二同步带8和第三同步轮5均逆时针转动,同时第一右同步轮32通过第三同步带9带动第四同步轮6均逆时针转动,第二同步带8和第三同步带9的逆时针转动同时带动第三压杆13的两端向加热陶瓷座17的方向靠近,同时第三压杆13带动套设在垃圾桶桶体上的垃圾袋向加热陶瓷座 17靠近;
47.(3)电机10继续工作,直至第一压杆11、第二压杆12和第三压杆13 带动垃圾袋在加热陶瓷座17的位置处停止,电机10停止,加热陶瓷座17工作,对垃圾袋进行加热,使垃圾袋在加热陶瓷座17位置处进行熔融粘接,实现垃圾袋的自动收口;
48.此时,打开垃圾桶的桶盖1,取出自动打包完成的垃圾袋即可;
49.(4)随后电机10反向转动,带动第一压杆11、第二压杆12和第三压杆13向桶盖1的边缘移动,到位后电机10停转,垃圾桶可以正常投放垃圾使用。
50.以上所述仅为本实用新型的较佳实施例,并不用于限制本实用新型,凡在本实用新型的设计构思之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1