一种取放盖一体机的制作方法
1.本实用新型涉及锂电池材料生产技术领域,特别涉及一种取放盖一体机。
背景技术:
2.近年来,锂离子电池以其高能量密度、高电压、无污染、长循环寿命、快速充放电等方面的优异性能和日趋降低的制作成本,使得锂离子电池的应用越来越普遍,随着信息产业的不断发展,对锂离子电池的要求也越来越高。锂电池生产工艺是将粉体材料放在匣钵中进行烧结,往往采用多列多层的方式进行,可以提高烧结效率。
3.部分粉体材料处于工艺要求:如气氛、温度等要求,需要在匣钵上加上一个匣钵盖。为实现整套系统的自动化运行,因此需要开发自动取、放匣钵盖的设备。
技术实现要素:
4.本实用新型的目的是克服现有技术存在的缺陷,提供一种实现自动化叠钵加盖、分钵取盖的取放盖一体机。
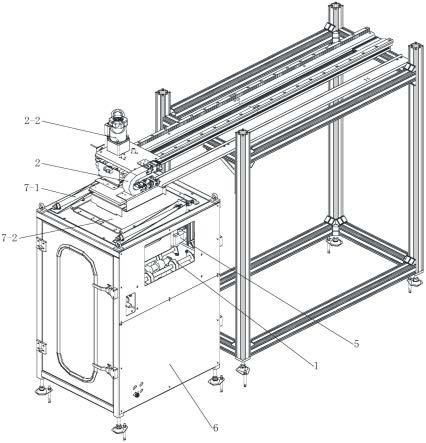
5.实现本实用新型目的的技术方案是:一种取放盖一体机,具有输送机构、移载机构、顶升机构、匣钵盖夹爪机构和夹爪定位夹持机构;所述输送机构安装于机架上;所述顶升机构安装于输送机构的下方;所述夹爪定位夹持机构对应顶升机构位置设置于输送机构的上方;所述匣钵盖夹爪机构对应设置于夹爪定位夹持机构上方,且与移载机构相连。
6.上述技术方案所述机架上端对应夹爪机构位置设有闸门机构。
7.上述技术方案所述闸门机构包括平移气缸和盖板;所述平移气缸安装于机架上,其活塞杆端与滑块相连;所述滑块与盖板相连,且滑块滑动设置于固定在机架上的滑轨上。
8.上述技术方案所述顶升机构包括升降组件、顶升气缸和顶升组件;所述顶升气缸安装于机架上;所述升降组件的平台的下端与顶升气缸的活塞杆相连,上端与顶升组件相连。
9.上述技术方案所述输送机构包括电机和由电机驱动转动的输送辊;所述阻挡气缸对应输送机构上的光电传感器位置设置。
10.上述技术方案所述匣钵盖夹爪机构包括匣钵盖夹持气缸、直线导轨和匣钵盖连杆机构;所述匣钵盖夹持气缸具有两个,且两个匣钵盖夹持气缸的缸体均安装于匣钵盖夹爪机构基座上,其活塞杆与对应匣钵盖连杆机构的一端相连;所述匣钵盖连杆机构的另一端与滑动设置在直线导轨上的夹爪相连。
11.上述技术方案所述夹爪定位夹持机构包括对应的匣钵定位夹持气缸和由匣钵定位夹持气缸驱动控制的匣钵连杆机构;所述匣钵连杆机构的端部包括侧夹持部和底承载部。
12.上述技术方案所述匣钵连杆机构的夹持部设有检测传感器。
13.上述技术方案所述匣钵连杆机构的夹持部连接有胶垫。
14.上述技术方案所述夹爪定位夹持机构具有两组,且两组之间的间距可调。
3相连,顶升机构3可以使用不同的匣钵类型,在不同匣钵类型的生产过程中,无需更换装置。顶升机构3的顶升气缸3-2可以设置为两个,可以分别为长行程气缸和短行程气缸;顶升机构3主要是根据输送机构1检测到到位后,长行程气缸将顶升零件顶起或者短行程气缸将顶升零件顶起,或者两个气缸同时将顶升零件顶起,接触到匣钵将其完成上下移动。
33.见图5,输送机构1包括电机1-2和由电机1-2驱动转动的输送辊1-1,阻挡气缸1-3对应输送机构1上的光电传感器位置设置。输送辊1-1采用积放滚筒的辊轮,在匣钵定位后辊轮也会停下,在保证效率的同时,保护匣钵不磨损;工作时,电机1-2带动输送辊1-1轮将匣钵输送到光电传感器检测到位的地方时,阻挡气缸1-3顶起将匣钵挡住。
34.见图3,匣钵盖夹爪机构4包括匣钵盖夹持气缸4-1、直线导轨4-2和匣钵盖连杆机构4-3;匣钵盖夹持气缸4-1具有两个,且两个匣钵盖夹持气缸4-1的缸体均安装于匣钵盖夹爪机构基座上,其活塞杆与对应匣钵盖连杆机构4-3的一端相连;匣钵盖连杆机构4-3的另一端与滑动设置在直线导轨4-2上的夹爪相连。该机构主要是匣钵盖夹持气缸4-1推动匣钵盖连杆机构4-3将两侧夹爪打开。工作时,首先碰到匣钵盖的是夹爪上面安装的缓冲装置和点接触光电开关,检测到之后匣钵盖夹持气缸4-1回收将匣钵盖连杆机构4-3收回,夹爪收回将匣钵盖夹住。
35.见图6,夹爪定位夹持机构5包括对应的匣钵定位夹持气缸5-1和由匣钵定位夹持气缸5-1驱动控制的匣钵连杆机构5-2;匣钵连杆机构5-2的端部包括侧夹持部5-3和底承载部5-4;匣钵连杆机构的侧夹持部5-3设有检测传感器;匣钵连杆机构5-2的夹持部连接有胶垫。一般夹爪定位夹持机构5由一对气缸和四对连杆机构组成,工作时在检测传感器检测到匣钵到位的时候两边匣钵定位夹持气缸5-1伸出,匣钵连杆机构5-2在接触到匣钵的时候,将匣钵上下两层紧紧的抱住完成定位和阻挡的作用。
36.夹爪定位夹持机构5具有两组,且两组之间的上下间距可调,可以一组固定安装在支架5-5上,另一组通过调节机构进行间距调节,比如支架5-5上设有一个腰形孔或者若干调节孔,通过拆装紧固件来调节;可以适应90~120cm高度的匣钵,不用每种匣钵都要换一种气缸。
37.见图7,移载机构2主要是由铝型材搭建,v型导轨做滑轨2-1,匣钵盖夹爪机构4与移载机构2之间通过调节板相连,该调节板上具有腰形孔,通过拆装紧固件来调节匣钵盖夹爪机构4的位置,在保证了轻便的同时,还能兼顾上下调节夹爪的高度,同时还可以非常有效的避免粉尘的堆积。移载机构2通过升降气缸2-2将固定在升降气缸2-2上面的匣钵盖夹爪机构4把匣钵夹起来,将其抓出机架6的舱体,然后单机带动带轮将匣钵通过v型导轨平移到配速链条上方,然后升降气缸2-2将将匣钵盖放到倍速链输送机上。
38.机架6主要是由刚型材焊接搭建,在框架上装两个维修门和封板,将整个机体密封起来。
39.本实用新型的一共有两种模式可以选择。
40.叠钵加盖:第一个匣钵在进入到工位前的时候,对射光电传感器会检测到匣钵,检测到位之后阻挡气缸1-3会抬起,将匣钵阻挡在工位上,下方的匣钵定位夹持气缸5-1伸出将匣钵定位,过1秒定位之后匣钵定位夹持气缸5-1再收回,底部顶升机构3的长行程气缸再将匣钵顶起,气缸的行程到极限之后,上方的匣钵定位夹持气缸5-1伸出将匣钵夹持在上方,然后闸门机构7将闸门盖板7-2打开,固定在闸门盖板7-2上方的匣钵盖夹爪机构4通过
升降气缸2-2行程下降到极限位,控制夹爪开合的匣钵盖夹持气缸4-1伸出将匣钵盖连杆机构4-3打开,将夹爪撑开将匣钵盖放在匣钵的上方,经过1到2秒的停顿以后控制夹爪升降的升降气缸2-2将夹爪收回,闸门盖板7-2关闭。这时底部的顶升机构3的气缸收回;第二个匣钵再输送进入,到达阻挡气缸1-3阻挡的点之后,底部顶升机构3中的短行程气缸将第二个匣钵抬起,顶升到第一个匣钵的下方;上方的匣钵定位夹持气缸5-1收回,让上方第一个匣钵底部靠在第二个匣钵上方,底下顶升机构3收回将双层匣钵重新放回输送上面。
41.分钵取盖:双层匣钵进入到框体前的时候,光电传感器检测到匣钵之后阻挡气缸1-3升起,将匣钵阻挡住在工位上,然后匣钵定位夹持气缸5-1将双层匣钵抱住定位,过2到3秒之后闸门机构7将闸门盖板7-2打开,固定在闸门机构7上的匣钵盖夹爪机构4通过升降气缸2-2下降到接触匣钵盖的时候,点接触光电开关检测到匣钵盖的时候,匣钵盖夹持气缸4-1伸出带动匣钵盖连杆机构4-3将夹爪夹紧匣钵盖,经过1到2秒的停顿以后控制升降气缸2-2将夹爪收回并拿出框体,通过横送机构将匣钵盖送到倍速链上。框体里面底下的顶升机构3中短行程气缸将双层匣钵顶起,上层匣钵定位夹持气缸5-1伸出将最上层的匣钵先夹持住,然后底部的顶升机构3收回,将最下层的匣钵先放到输送辊轮上,线体上的阻挡气缸1-3收回,先将下方的匣钵先输送出去,下方顶升机构3中的长行程气缸伸出托住上方夹持住的匣钵底部,上方匣钵定位夹持气缸5-1气缸收回,然后下方顶升机构3收回将匣钵送到输送上面,将最后一个匣钵送出框体。
42.以上所述的具体实施例,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1