用飞行无人机监测储存系统的方法与流程
1.本发明涉及一种用于储存和取出容器的自动储存和取出系统,具体地涉及用于监测这种系统以发现错误的方法,并且更具体地涉及一种用于定位和监测在这种系统上操作的停用的或发生故障的自主容器搬运车辆的方法。
背景技术:
2.图1公开了一种具有框架结构100的典型的现有技术的自动储存和取出系统1,并且图2和图3公开了适合于在这种系统1上操作的两个不同的现有技术容器搬运车辆201、301。
3.框架结构100包括直立构件102、水平构件103以及储存体积,该储存体积包括成行布置在直立构件102与水平构件103之间的储存柱105。在这些储存柱105中,储存容器106(也称为箱)一个堆叠在另一个的顶部上,以形成堆垛107。构件102、103典型地可以由金属(例如挤压铝型材)制成。
4.自动储存和取出系统1的框架结构100包括横跨框架结构100的顶部布置的轨道系统108,在轨道系统108上操作多个容器搬运车辆201、301,以将储存容器106从储存柱105升高和将储存容器降低到储存柱105中,并且还在储存柱105上方运输储存容器106。轨道系统108包括:第一组平行轨道110,布置成引导容器搬运车辆201、301在第一方向x上横跨框架结构100的顶部移动;以及第二组平行轨道111,布置成垂直于第一组轨道110,以引导容器搬运车辆201、301在垂直于第一方向x的第二方向y上的移动。储存在柱105中的容器106通过容器搬运车辆通过轨道系统108中的存取开口/网格单元112存取。容器搬运车辆201、301能够在储存柱105上方横向移动,即在平行于水平x-y平面的平面中。
5.在将容器从柱105中升高和将容器降低到柱105中期间,框架结构100的直立构件102可以用于引导储存容器。容器106的堆垛107典型地是自支撑的。
6.每个现有技术的容器搬运车辆201、301包括车主体201a、301a以及第一组车轮和第二组车轮201b、301b、201c、301c,车轮分别使得容器搬运车辆201、301能够在x方向和y方向上横向移动。在图2和图3中,每组中的两个车轮完全可见。第一组车轮201b、301b布置成与第一组轨道110中的两个相邻的轨道接合,并且第二组车轮201c、301c布置成与第二组轨道111中的两个相邻的轨道接合。至少一组车轮201b、301b、201c、301c能够被提升和降低,使得第一组车轮201b、301b和/或第二组车轮201c、301c能够随时与相应的一组轨道110、111接合。
7.每个现有技术的容器搬运车辆201、301还包括用于竖直运输储存容器106的升降设备(未示出),例如从储存柱105升高储存容器106,以及将储存容器106降低到储存柱105中。升降设备包括适于接合储存容器106的一个或多个夹持/接合设备,并且夹持/接合设备能够从车辆201、301降低,使得能够在与第一方向x和第二方向y正交的第三方向z上调节夹持/接合设备相对于车辆201、301的位置。容器搬运车辆301的夹持设备的部分在图3中示出,利用参考标号304表示。容器搬运设备201的夹持设备位于图2中的车主体301a内。
8.传统地,并且还出于本技术的目的,z=1标识储存容器的最上层,即直接在轨道系统108下方的层,z=2标识轨道系统108下方的第二层,z=3标识第三层等。在图1中公开的示例性现有技术中,z=8标识储存容器的最下部底层。类似地,x=1...n和y=1...n标识每个储存柱105在水平平面中的位置。因此,作为实例,并且使用在图1中指示的笛卡尔坐标系x、y、z,图1中标识为106’的储存容器能够称为占据储存位置x=10、y=2、z=3。容器搬运车辆201、301能够称为在z=0层中行进,并且每个储存柱105能够通过其x坐标和y坐标来标识。
9.框架结构100的储存体积经常称为网格104,其中,网格内的可能的储存位置称为储存单元。每个储存柱可以由x方向和y方向上的位置标识,而每个储存单元可以通过x方向、y方向以及z方向上的容器标号标识。
10.每个现有技术的容器搬运车辆201、301包括用于当运输储存容器106穿过轨道系统108时接收和收起储存容器106的储存隔室或空间。储存空间可以包括居中布置在车主体201a内的腔体,如图2所示,并且例如在wo2015/193278a1中描述的,其内容通过引证结合于本文。
11.图3示出了具有悬臂结构的容器搬运车辆301的可替代的配置。例如在n0317366中详细描述了这种车辆,其内容也通过引证结合于本文。
12.图2所示的中央腔体容器搬运车辆201可以具有沿x方向和y方向覆盖一面积的占据空间,该占据空间的尺寸通常等于储存柱105的横向范围,例如在wo2015/193278a1中描述的,其内容通过引证结合于本文。本文中使用的术语“横向”可以指“水平”。
13.可替代地,中央腔体容器搬运车辆101可以具有大于由储存柱105限定的横向区域的占据空间,例如在wo2014/090684a1中公开的。
14.轨道系统108典型地包括具有凹槽的轨道,车辆的车轮在凹槽中行进。可替代地,轨道可以包括向上突出的元件,其中,车辆的车轮包括凸缘以防止脱轨。这些凹槽和向上突出的元件统称为导轨。每个轨道可以包括一个导轨,或者每个轨道可以包括两个平行的导轨。
15.wo2018146304(其内容通过引证结合于本文)示出了轨道系统108的典型的配置,包括在x方向和y方向上的轨道和平行导轨。
16.在框架结构100中,大部分柱105是储存柱105,即储存容器106以堆垛107储存的柱105。然而,一些柱105可以具有其他目的。在图1中,柱119和120是由容器搬运车辆201、301使用以卸下和/或拾取储存容器106的这种专用柱,使得其能够被运输到存取站(未示出),在存取站处,能够从框架结构100的外部存取储存容器106,或者将储存容器106移出或移入框架结构100。在本领域内,这种位置通常称为“端口”,并且端口所在的柱可以称为“端口柱”119、120。到存取站的运输可以在水平的、倾斜的和/或竖直的任何方向上。例如,储存容器106可以放置在框架结构100内的随机或专用柱105中,然后通过任何容器搬运车辆拾取并且运输到端口柱119、120用于进一步运输到存取站。注意,术语“倾斜”表示储存容器106的运输具有在水平与竖直之间的某个方向的总体运输定向。
17.在图1中,第一端口柱119例如可以是专用卸下端口柱,其中,容器搬运车辆201、301能够卸下待运输到存取站或转移站的储存容器106,并且第二端口柱120可以是专用拾取端口柱,其中,容器搬运车辆201、301能够拾取已经从存取站或转移站运输来的储存容器
106。
18.存取站典型地可以是拾取站或备货站,在该站中将产品物品从储存容器106移除或定位到储存容器106中。在拾取站或备货站中,通常不将储存容器106从自动储存和取出系统1移除,而是一旦存取,就再次返回到框架结构100中。端口还可以用于将储存容器转移到另一个储存设施(例如到另一个框架结构或到另一个自动储存和取出系统)、运输车辆(例如火车或卡车)、或生产设施。
19.通常使用包括传送器的传送器系统在端口柱119、120与存取站之间运输储存容器。
20.如果端口柱119、120和存取站位于不同的高度,则传送器系统可以包括具有竖直部件的升降设备,用于在端口柱119、120与存取站之间竖直运输储存容器106。
21.传送器系统可以布置成在不同的框架结构之间转移储存容器106,例如在wo2014/075937a1中描述的,其内容通过引证结合于本文。
22.当待存取储存在图1中公开的柱105中的一个柱中的储存容器106时,容器搬运车辆201、301中的一个车辆被指示从其位置取出目标储存容器106,并且将该储存容器运输到卸下端口柱119。操作涉及将容器搬运车辆201、301移动到目标储存容器106定位在其中的储存柱105上方的位置,使用容器搬运车辆201、301的升降设备(未示出)从储存柱105取出储存容器106,并且将储存容器106运输到卸下端口柱119。如果目标储存容器106位于堆垛107内的深处,即,一个或多个其他储存容器106定位在目标储存容器106上方,则操作还涉及从储存柱105提升目标储存容器106之前,临时移动定位在上方的储存容器。这个步骤(在本领域内有时称为“挖掘”)可以利用随后用于将目标储存容器运输到卸下端口柱119的同一容器搬运车辆、或者利用一个或多个其他协作的容器搬运车辆来执行。可替代地或此外,自动储存和取出系统1可以具有专门用于从储存柱105临时移除储存容器的任务的容器搬运车辆。一旦目标储存容器106已经从储存柱105移除,临时移除的储存容器能够重新定位到原始储存柱105。然而,移除的储存容器可以可替代地重新定位到其他储存柱。
23.当储存容器106待储存在柱105中的一个柱时,容器搬运车辆201、301中的一个车辆被指示从拾取端口柱120拾取储存容器106,并且将该储存容器运输到待储存该储存容器的储存柱105上方的位置。在已经移除定位在储存柱堆垛107内的目标位置处或目标位置上方的所有储存容器之后,容器搬运车辆201、301将储存容器106定位在期望的位置处。然后移除的储存容器可以降低回到储存柱105中,或者重新定位到其他储存柱。
24.为了监测和控制自动储存和取出系统1,例如监测和控制框架结构100内的各个储存容器106的位置,每个储存容器106的内容物以及容器搬运车辆201、301的移动,使得期望的储存容器106能够在期望的时间递送到期望的位置而容器搬运车辆201、301彼此不碰撞,自动储存和取出系统1包括控制系统500,该控制系统典型地计算机化并且典型地包括用于保持跟踪储存容器106的数据库。
25.在现有技术中的监测储存系统中的错误的方法
26.如能够理解的,如以上描述的现有技术的储存和取出系统是高度自动化的。系统的复杂物流和自主容器搬运车辆(也称为“机器人”)的操作由计算机化的控制系统管理。这种系统以及机器人本身不可避免地易于出错和发生故障。
27.在这种现有技术的储存系统中,控制系统通常包括多个软件程序或模块,每个软
件程序或模块负责系统的整体控制的不同方面。一个这种模块是所谓的“异常处理程序”模块501,负责标识、监测以及维修容器搬运车辆的错误或故障。
28.在许多情况下,异常处理程序模块能够在没有用户干预的情况下执行以下动作:
29.·
在没有中断系统操作的情况下,自动修复》97%的可修复机器人错误
30.·
当机器人报告错误时,异常处理程序模块接管特定机器人的控制,而其他机器人照常操作
31.·
如果发生故障的机器人不能100%确定其自身的位置,则异常模块可以封锁该机器人周围的单元区域。系统可以在封锁区域的边界外部正常操作。
32.·
异常模块可以使用机器人的升降设备以搜索封锁区域内的容器深度(在储存柱中)的独特图案,从而检测该机器人的位置。
33.·
如果需要,则能够命令另一机器人创建容器深度的独特图案,以帮助标识发生故障的机器人的位置。
34.在一些情况下,标识发生故障的机器人位于的具体单元(或者车辆可能在单元之间)或者其他类型异常的精确位置是一个挑战。后一个问题在具有低天花板高度的非常大的储存系统的情况下尤其困难。在具有低天花板高度的情况下,当从上方观看时在非常大的表面区域内的所有点看起来相似,使得对机器人位置的视觉确认(例如利用固定相机)变得困难。因此,经常需要人工检查员手动检查储存系统框架结构的上部表面。然而,这是危险的操作,通常需要关闭系统,这代价高昂。因此,存在对于确认错误、确定停用车辆的精确位置或以其他方式执行对储存系统的视觉检查的附加或可替代设备的需要。
35.飞行无人机
36.小型飞行无人机是可商购的。这种可商购的无人机的实例包括可从中国深圳的无人机制造商购得的小型四轴飞行器机群。这种无人机已经变得相当复杂,先进的定位系统和避障系统使无人机的操作相对简单且可靠。
37.无人机可以在室内和室外操作。当在室外时,无人机使用gps来确定位置。无人机使用gps信息悬停在固定位置中,以导航到期望的位置,并且在与飞行员的通信失去联系的情况下返回家中。无人机还具有各种其他传感器:前部、后部、顶部以及底部碰撞检测器。还使用气压传感器确定高度等。
38.当在室内飞行时,gps信号通常不可用。在这种情况下,无人机通常使用面向下的光学传感器来标识地板上的图案,以便悬停在固定位置中。
技术实现要素:
39.在独立权利要求中阐述并且表征了本发明,同时从属权利要求描述了本发明的其他特征。
40.在一个方面中,本发明涉及一种使用飞行无人机来对储存系统进行视觉检查的方法,具体地,来定位、标识以及检查以上描述类型的自动储存和取出系统中的发生故障的容器搬运车辆或其他错误。
41.在第二方面中,本发明涉及一种在自动储存和取出系统中定位和解决错误的方法,其中,控制系统的异常处理程序模块与飞行无人机通信,并且控制飞行无人机定位和检查系统中的可疑错误(例如发生故障的自主容器搬运车辆)。
42.在第三方面中,人类操作员根据该方法引导(pilot)飞行无人机以定位和检查可能的错误。
43.以下是根据本发明的方法中的步骤的示例性实施方式:
44.将系统的车辆停用或以其他方式报告错误。
45.控制系统的异常处理程序模块知悉停用车辆的大致位置。异常处理程序模块封锁包围假定位置的大的网格区段。
46.异常处理程序模块向无人机飞行控制模块发出命令以部署飞行无人机。
47.无人机飞行控制模块使得无人机启动自动起飞顺序,上升到高于储存系统的框架结构但低于框架布置在其中的仓库设施的天花板的高度的预定高度。
48.无人机可以具有界定上部高度和下部高度的高度限制器功能,使得无人机能够在框架的上部水平上操作的车辆上方且在天花板下方的空间中安全地飞行。
49.基于停用车辆的假定位置,无人机控制模块使无人机启动搜索图案。
50.在一个实施方式中,无人机使用机载光学传感器将框架的网格图案导航到由异常处理程序模块标识的大致位置。无人机可以通过多个装置在网格上方导航。例如,无人机使用光学传感器可以简单地对其沿x方向和y方向在上方经过时的单元的数量进行计数,以导航到由异常处理程序模块指定的给定坐标。可替代地,固定的定位装置可以帮助无人机在网格上方导航,例如信标、位置标识符或附接在已知位置处(例如在天花板上或在框架结构本身上)的其他装置。这种装置可以具有由无人机识别的独特视觉标识符、rfd信号等。同样地,无人机能够识别异常处理程序模块知悉精确位置的一个机器人或多个机器人,或者可以标识关于车辆位置或容器深度的图案。
51.一旦到达停用车辆的大致位置,无人机可以执行预编程的搜索图案以标识和精确地定位停用车辆或以其他方式标识停用车辆(例如通过机器人上的独特标识符)。可替代地或此外,人类操作员可以承担无人机的控制,使用无人机上的相机定位停用车辆或其他错误和/或执行对停用车辆或其他错误的视觉检查。
52.在另一方面,指示停用车辆发送短程遇险信号,例如可由从无人机或其他装置发送的信号激发的rfid信号。
53.在已经标识停用车辆的精确位置之后,异常处理程序模块然后能够重新限定较小的封锁区域,以允许储存系统的更大的部分继续正常操作。
54.无人机在完成其任务之后能够启动返回顺序,例如使用网格图案或其他导航装置以找到其回到其基地和地面的路线。
55.应当理解,以上描述的方法可以用于需要视觉检查的任何类型的错误,包括例如对系统中的可疑火灾或其他异常的检查或者甚至常规视觉检查。
附图说明
56.附上下列附图以便于理解本发明。附图示出了本发明的实施方式,现在将仅通过实例的方式描述本发明的实施方式,在附图中:
57.图1是用于储存和取出容器的现有技术的自动储存和取出系统的立体图。
58.图2和图3是示出了现有技术的容器搬运车辆的立体图。
59.图4是现有技术的自动储存和取出系统的框架结构的立体图,示出了从发射台起
飞并且悬停在天花板与框架结构的上部表面之间的飞行无人机。
60.图5是布置在具有梁或其他障碍物的天花板下方的框架结构的立体图,并且示出了人类无人机操作员和无人机操作站的示意性表示。
61.图6是示出了无人机使用传感器以避免与天花板/梁和框架结构接触的侧视图。
62.图7是示出了在没有容器搬运车辆的网格区段上方以相对低的高度飞行的无人机的立体图;
63.图8是框架结构的立体图,示出了以可识别图案布置的多个容器搬运车辆。
64.图9是示出了执行搜索图案的无人机以及由异常处理程序模块封锁的网格区段的顶视图。
65.图10是示出了无人机通过检测短程遇险信号来定位容器搬运车辆的顶视图。
具体实施方式
66.在下文中,将参考附图更详细地讨论本发明的实施方式。然而,应当理解,附图并不旨在将本发明限制于附图中描绘的主题。
67.本发明包括自动储存和取出系统1,包括根据以上描述的现有技术构造的并且在图1到图3中示出的框架结构100(即多个直立构件102和多个水平构件103),该框架结构由直立构件102支撑,并且此外,框架结构100包括在x方向和y方向上的第一上部轨道系统108,在容器搬运车辆201/302该第一上部轨道系统上操作。
68.框架结构100能够具有任何尺寸。具体地,应当理解,框架结构能够比图1中公开的框架结构更宽和/或更长和/或更深。例如,框架结构100可以具有大于700
×
700列的水平范围和大于12个容器的储存深度。
69.自动储存和取出系统的操作由计算机化的控制系统500指导和监测,该计算机化的控制系统包括如在图1中概念性地示出的异常处理程序模块501,并且该异常处理程序模块尤其负责检测和校正容器搬运车辆运行中的异常或错误,诸如,例如限定包围停用车辆的网格的封锁区域。
70.现在将参考图4到图10更详细地讨论根据本发明的自动储存和取出系统的一个实施方式和监测这种系统的方法。
71.本发明包括利用飞行无人机400来监测储存系统的操作以及系统的各个方面的定位和视觉检查,例如定位和检查停用的容器搬运车辆201a/301a。如本文使用的,术语“飞行无人机”是指无人驾驶的、远程操作的旋翼飞行器(诸如直升机或四轴飞行器),其通过围绕竖直轴线旋转的提升表面(旋翼)部分或全部地保持在空中。无人机400能够由人工类行员402(例如图5所示在飞行控制站404工作)手动远程操作。在另一方面,无人机的飞行可以是自动的,例如由控制系统500的飞行控制模块502控制,该飞行控制模块例如与异常处理程序模块501通信。
72.将结合监测系统的一个说明性实例描述本发明,即发生故障的容器搬运车辆201a/301a的定位和视觉检查。然而,应当理解,无人机还能够用于定位和检查许多其他类型的错误和状况,例如检查框架结构中的可疑缺陷、定位可疑火灾或者系统的常规视觉检查。
73.如图4所示,无人机400从发射台406启动。无人机可以由飞行控制模块502控制或
者可以由人类飞行员402控制。无人机400在位于框架结构的上部表面410与安装有储存系统的建筑物的天花板412之间的空域408中的高度内飞行。如图5所示,空域408还可以是上部表面410与附接到天花板412(例如梁414)的障碍物之间的高度。
74.如图6所示,无人机400可以包括相机415(未示出)以及布置成将无人机的高度保持在空域408内的避障传感器416。无人机还可以具有预编程的高度限制,例如由飞行控制模块502控制。
75.向无人机发送飞行任务以定位停用车辆201a/301a。如能够从图7理解的,框架结构的上部表面可能具有不含操作车辆或其他视觉提示的大的区域,其中,操作车辆或其他视觉提示用于在飞行任务期间无人机在给定点处的精确位置的视觉确认。因此,本发明的方法包括允许无人机在框架结构上方导航并且确定精确位置的导航装置。
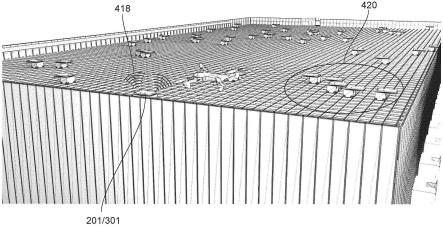
76.图8概念性地示出了一种用于在飞行任务期间确定无人机在任何给定点处的精确位置的可能的方法,该方法包括与知悉操作车辆201/301的精确位置的控制系统500或异常处理程序模块500通信。操作车辆可以发射可由无人机400检测的位置信号418。可替代地,无人机400可以配备有相机,该相机布置成检测以特定图案420布置在可由异常处理程序模块501识别的已知位置的多个车辆。
77.可替代地,可以命令无人机400飞行到框架结构的表面上方,在x方向和y方向上对网格结构中的单元进行计数,直到无人机到达图9中示出的第一较大的封锁区域422的坐标,该封锁区域由异常处理程序模块502限定并且基于停用车辆201a/301a的估计位置。
78.如图9所示,在到达第一封锁区域422时,可以命令无人机400执行预编程的搜索图案424。在无人机执行搜索图案时,异常处理程序模块可以周期性地重新限定第二较小的封锁区域426。无人机继续沿搜索图案行进,直到最终视觉定位到停用车辆201a/301a,于是异常处理程序模块限定第三最受限的封锁区域428。如图10所示,无人机400可替代地检测由停用车辆发射的遇险信号430。
79.在到达其预期位置时,无人机例如可以通过利用其相机记录静态图像或视频来执行视觉检查。可替代地,人类飞行员402可以执行视觉检查。
80.在完成任务时,无人机400通过预编程的返回命令、通过再次对网格单元进行计数或在来自人类飞行员的协助下返回到其发射台406。
81.在前述描述中,已经描述了采用无人机的检查方法的各个方面。然而,该描述并不旨在以限制意义进行解释。对公开的主题所属领域的技术人员来说明显的说明性实施方式的各种修改和变化以及系统的其他实施方式视为落在本发明的范围内。
82.参考标号列表
83.现有技术(图1-图4):
84.1 现有技术的自动存取系统
85.100 框架结构
86.102 框架结构的直立构件
87.103 框架结构的水平构件
88.104 储存网格
89.105 储存柱
90.106 储存容器
91.106
’ꢀ
储存容器的具体位置
92.107 堆垛
93.108 轨道系统
94.110 第一方向(x)上的平行轨道
95.110a 第一方向(x)上的第一轨道
96.110b 第一方向(x)上的第二轨道
97.111 第二方向(y)上的平行轨道
98.111a 第二方向(y)的第一轨道
99.111b 第二方向(y)的第二轨道
100.112 存取开口/网格单元
101.119 第一端口柱
102.120 第二端口柱
103.201 现有技术的储存容器车辆
104.201a 储存容器车辆201的车主体
105.201b 驱动装置/车轮布置,第一方向(x)
106.201c 驱动装置/车轮布置,第二方向(y)
107.301 现有技术的悬臂式储存容器车辆
108.301a 储存容器车辆301的车主体
109.301b 第一方向(x)上的驱动装置
110.301c 第二方向(y)上的驱动装置
111.304 夹持设备
112.500 控制系统
113.501 异常处理程序模块
114.x 第一方向
115.y 第二方向
116.z 第三方向
117.201a/301a 停用车辆
118.400 飞行无人机
119.402 飞行员
120.404 飞行控制站
121.406 发射台
122.408 空域
123.410 框架的上部表面
124.412 天花板
125.414 梁
126.415 相机
127.416 传感器
128.418 位置信号
129.420 车辆的已知图案
130.422 较大的封锁区域
131.424 搜索图案
132.426 较小的封锁区域
133.428 最终的封锁区域
134.430 遇险信号
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1