具有摄像机的悬臂旋转式起重机以及用于在起重机运行中减少负载钟摆的方法与流程
具有摄像机的悬臂旋转式起重机以及用于在起重机运行中减少负载钟摆的方法
1.本发明涉及一种根据权利要求1的前序部分所述的悬臂旋转式起重机以及一种根据权利要求7所述的方法。
2.由于提升绳索的机械性能,特别是其柔韧性,并且由于作用于在悬挂于此处的元件(特别是承载装置和/或负载接收装置和/或由该负载接收装置接收的负载)上的力,例如离心力或风力,以及由于斜拉,可能出现相应元件偏离横向设定位置的相对位移。其中,可能产生不期望的钟摆运动,特别是负载钟摆运动。为了能够确定此类位移并随后能够凭借对应的驱动装置控制策略至少减少或避免不期望的钟摆运动,必须了解承载装置和/或负载接收装置和/或负载的横向实际位置。
3.从ep 1 992 583 b1中已知一种具有用于确定相对于重力方向的绳索角度的传感器单元的起重机,其中该传感器单元布置在绳索从动元件处,该绳索从动元件在提升绳索处受到引导。然而,这样的与提升绳索一起摆动的机构很容易受到损害。
4.从ep 1 880 971 b1中已知一种具有用于确定吊钩横梁扭转的陀螺仪传感器的起重机,其中该陀螺仪传感器布置在该吊钩横梁处。这样的传感器布置具有一个缺点,即从传感器到起重机控制装置的无线电数据传输是不安全的。
5.通用的悬臂旋转式起重机从de 10 2013 012 019 a1中已知。具有用于检测负载或绳索角度的摄像机的其他起重机从ep 2 878 565 a1、de ep 3 000 761 a1和de 26 42 373 a1中已知。
6.从该现有技术出发,本发明的目的在于,改进一种悬臂旋转式起重机以及一种方法,借助该方法使得以简单的方式在起重机运行中减少,优选消除或避免承载装置和/或负载接收装置和/或负载的钟摆运动成为可能。
7.该目的通过具有权利要求1所述的特征的悬臂旋转式起重机和具有权利要求7所述的特征的方法来实现。本发明的有利的实施方案在从属权利要求以及下文的描述中给出。
8.根据本发明,由此改进一种悬臂旋转式起重机,该悬臂旋转式起重机具有:悬臂,该悬臂在其悬臂尖的区域中具有用于至少一条提升绳索的至少一个转向轮;和用于使悬臂围绕水平变幅轴枢转的驱动装置;和用于使悬臂围绕垂直旋转轴线旋转的驱动装置;和用于提升或下降悬挂在该至少一条提升绳索处的元件的驱动装置,该元件采用承载装置和/或负载接收装置和/或由该负载接收装置接收的负载的形式;以及控制装置,其中在悬臂尖的区域中布置有摄像机,该摄像机的检测范围指向悬挂在该至少一条提升绳索处的元件,并且摄像机的摄像机轴线与重力轴线基本平行对齐,其中该摄像机被适配为检测该元件的横向实际位置,并且该控制装置被设计和适配为确定该元件的横向实际位置与横向设定位置之间的相对位移,并且基于该相对位移为上述驱动装置中的至少一个驱动装置确定控制指令,以便减少,优选地完全消除或避免该相对位移,使得能够借助布置在摄像机处的角度传感器来检测摄像机轴线与重力轴线的角度偏差,并且能够借助控制装置基于角度偏差,优选地通过计算来校正元件的借助摄像机检测到的横向实际位置。
9.换句话说,由角度传感器检测到的,特别是测量出的摄像机轴线与重力轴线的角度偏差用于,校正承载装置的由摄像机检测到的横向实际位置,该横向实际位置由于角度偏差而不正确。借助控制装置,特别是借助适当的评估软件,在确定相对位移时可对应地考虑到角度偏差。
10.在本发明的上下文中,“承载装置”理解为与起重机牢固连接的部件,该部件布置在提升绳索与负载接收装置之间,或者在提升绳索与直接与承载装置连接的负载之间。承载装置例如可包括吊钩、吊钩滑车和/或吊钩横梁,其中对应的承载装置则各自与起重机连接且保持连接,用于永久运行,也用于不同类型和形状的负载接收装置和/或负载。相反,负载接收装置(该负载接收装置优选地设置用于不通过其他装置接收和直接接收负载)能够在运行期间根据要搬运的负载的类型和形状而改变,例如从用于搬运集装箱的也被称为“spreader”(英语,一种集装箱专用吊具)的集装箱吊具改变为用于搬运散装货物的抓具,或者在同一类型的负载接收装置的不同尺寸之间改变,例如针对不同散装货物的不同抓具。
11.在本发明的上下文中,“确定控制指令”理解为,控制指令根据其类型(例如摆动或旋转)以及根据其大小(例如十秒的持续时间或10
°
的角度)来确定。确定控制指令可包括产生或生成控制指令。随后,将这些控制指令发送到相应的驱动装置。
12.换句话说,借助根据本发明布置和适配的摄像机例如能够以光学方式检测作为悬挂在至少一条提升绳索处的元件的承载装置和/或负载接收装置和/或接收的负载的横向实际位置。相应元件的横向实际位置能够特别地根据元件的至少一个轮廓,特别是外部轮廓来检测,并且/或者在下文提及的系统的框架中,根据元件处的能够由摄像机检测的至少一个目标标记来检测。就此而言,在控制装置中也可存储为了确定相对位移而考虑的元件的典型轮廓,然后可将这些典型轮廓与摄像机数据,特别是摄像机图像相匹配,以便检测元件的横向实际位置。
13.特别是在适当的评估软件的帮助下,控制装置确定元件的横向实际位置与横向设定位置的偏差。这特别地可根据由摄像机检测到的该至少一个目标标记和/或轮廓的实际位置与该至少一个目标标记和/或轮廓的设定位置的偏差来进行。
14.也可想象的是,能够借助检测到的轮廓检测为了确定相对位移而考虑的元件的重心,并且该重心用于确定元件的横向实际位置与横向设定位置之间的相对位移。
15.横向设定位置是预定的,并且特别地可自由选择。优选地,考虑的元件,特别是承载装置和/或负载接收装置和/或负载的重心位于一条虚拟的设定线上的横向设定位置中,该设定线指向重力轴线的方向,并同时穿过提升绳索离开转向轮的运行点,或者在有几条提升绳索和几个转向轮以及对应运行点的情况下,穿过由所有运行点形成的线的中心点。
16.根据为了确定相对位移而考虑的元件的相对位移,借助控制装置为至少一个驱动装置确定控制指令,以便实现对元件,即特别是承载装置和/或负载接收装置和/或负载的钟摆运动的阻尼或避免。特别地,通过检测尚未提升的负载的(不期望的)斜拉来避免钟摆运动是可能的,其中控制装置可在钟摆运动发生之前为至少一个驱动装置确定控制指令。
17.摄像机优选被适配为,除了元件的横向位移之外,还检测旋转位移或扭转。基于这样的位移,特别地能够确定元件,特别是负载的角度位置,特别地,可在处理元件,特别是负载时考虑到该角度位置。
18.凭借根据本发明的悬臂旋转式起重机,可以有利的方式确定对应元件的横向实际位置,而无需提升绳索或承载装置处的附加传感器。摄像机布置在悬臂的一个区域中,只有极小的力作用在该区域中。不需要与提升绳索或承载装置或悬挂在该提升绳索处的其他元件进行机械连接。因此,从摄像机到控制装置的信号传输可以特别简单的方式经由传输安全的电缆连接来实现。但是有利地,无线信号传输也是可能的,因为通过将摄像机布置在悬臂尖处,可不用担心直接信号路径例如因该至少一条提升绳索和悬挂在此处的元件的运动而损坏。
19.有利地设置为,摄像机以铰接方式安装,以便使得摄像机轴线的对齐成为可能,其中摄像机优选地围绕第一轴承轴和/或围绕第二轴承轴以铰接方式安装,以便使得摄像机轴线的对齐成为可能,该第一轴承轴布置为垂直于摄像机轴线,该第二轴承轴布置为垂直于摄像机轴线和该第一轴承轴并且优选地与该第一轴承轴相交。
20.摄像机围绕第一轴承轴的可旋转性特别地有助于补偿悬臂的枢转运动,即在改变悬臂的伸出程度时。
21.可为每个轴承轴设置有旋转接头,该旋转接头使得摄像机围绕相应的轴承轴,特别地在两个旋转方向上进行旋转运动成为可能。也可想象的是,设置有两个旋转接头,其中旋转接头中的每个旋转接头都使得摄像机围绕轴承轴中的一个轴承轴进行旋转运动成为可能。优选地,设置有唯一的旋转接头,该唯一的旋转接头使得摄像机围绕第一轴承轴和第二轴承轴进行旋转运动成为可能。将围绕第一轴承轴和第二轴承轴的旋转运动叠加起来是可能的。
22.用于将摄像机安装在悬臂处的活球接头也是可想象的,然而不围绕第一轴线或第二轴线进行的运动是不期望的,并且因此优选地例如通过对应的导向装置来禁止这类运动。
23.因此,可能的是,摄像机轴线即便在悬臂枢转和/或旋转运动时也与重力轴线基本平行对齐,以便确保尽可能准确地检测横向实际位置,并且从而尽可能准确地确定横向实际位置与横向设定位置之间的相对位移。
24.摄像机的重心以结构简单的方式如此布置为与轴承轴间隔开,使得形成摄像机的钟摆式悬挂,其中摄像机轴线的对齐通过其自身重量自动进行。因此,被动地(即在没有进一步辅助装置的情况下)实现:在摄像机的平衡位置中,摄像机轴线与重力轴线基本平行对齐。
25.有利地,能够借助阻尼器来阻尼摄像机的运动,并且该阻尼器优选地被设计为扭转阻尼器。
26.优选地,为每个轴承轴设置有一个阻尼器,从而使得能够阻尼围绕相应轴承轴的旋转运动。特别地,该阻尼器仅被分配给一个唯一的轴承轴。然而,一个阻尼器被分配给几个轴承轴也是可能的。
27.阻尼器布置在摄像机与悬臂之间。阻尼器可与相应旋转接头形成一个结构单元,或者布置为与相应旋转接头独立。
28.例如被设计为扭转阻尼器的阻尼器在每种情况下都被分配给一个唯一的轴承轴,布置为围绕相应轴承轴,并且优选地与旋转接头形成一个结构单元。
29.阻尼器,特别是扭转阻尼器,例如可被设计为油阻尼器。当然,也可使用其他类型
的阻尼器。
30.借助阻尼器,使得摄像机轴线即便在悬臂动态运动和/或振动时也与重力轴线基本平行对齐成为可能。
31.角度传感器优选地检测摄像机的所有(例如四个)可能的旋转方向上的角度偏差。也可想象的是,角度传感器只检测一个、两个或三个旋转方向上的角度偏差。此外,在摄像机只具有一个轴承轴的实施方式中,可设置,角度传感器检测横向,优选垂直于摄像机的可能的旋转方向的角度偏差,这些偏差例如可能由于悬臂在旋转运动中的弹性变形而发生。
32.这样的角度偏差例如可以是由摄像机的振动和/或钟摆运动产生的动态角度偏差。由于旋转接头和/或阻尼器中或处的摩擦而出现静态的角度偏差也是可能的。
33.通过了解角度偏差可能的是,在确定为了确定相对位移而考虑的元件的实际位置时获得高精度。角度偏差将被解释为横向实际位置与横向设定位置之间的相对位移,从而使得将确定错误的控制指令。
34.有利的方式是,悬臂旋转式起重机被设计为港口起重机,特别是移动式港口起重机。这样的起重机从wo 2011/098542 a1中已知。此外,所谓的移动式港口起重机已经从科尼全球公司的名称为“柴油电动4型移动式港口起重机”的公司手册中已知,在海港或集装箱码头使用它来搬运集装箱或散装货物。此类悬臂旋转式起重机基本由底部台车(凭借该底部台车,悬臂旋转式起重机支撑在陆地,例如码头上,或支撑在浮桥上)以及能够围绕垂直旋转轴线旋转地安装在底部台车上的顶部台车组成。底部台车可经由轮胎在码头上移动,或经由轨道轮在轨道上移动。在搬运作业期间,底部台车可经由支架支撑。
35.在顶部台车上布置有在垂直方向上延伸的塔、用于使悬臂和/或顶部台车围绕旋转轴线旋转的旋转机构、用于卷绕和松开提升绳索以用于提升或下降悬挂在此处的元件的提升机构,该元件采用承载装置和/或负载接收装置和/或由该负载接收装置接收的负载的形式。优选地,配重也布置在顶部台车上。悬臂可在塔的背离配重的一侧处,能够围绕水平变幅轴枢转地与顶部台车或底部台车连接。附加地,悬臂能够经由在悬臂处和在顶部台车或塔处铰接的变幅缸,从其横向突出的运行位置枢转到较不突出或直立的运行或静止位置。此外,悬臂优选被设计为框架结构,例如成格构式桅杆的形式。根据起重机的实施方案,上述部件中的单个部件也可省去或以不同的方式相互连接,因为在本发明的上下文中,在对应的悬臂旋转式起重机处存在能够围绕变幅轴枢转和能够围绕旋转轴线旋转的悬臂就足够了。例如,可想象的是,起重机不具有顶部台车,并且塔与悬臂一起经由旋转机构支承在底部台车上,并由此能够围绕垂直旋转轴线共同旋转。于是,提升机构和配重不由顶部台车承载,而是各自布置在起重机的其他合适的位置处,例如塔处。
36.能够进一步改进相对位移的减少,方法是形成一种系统,该系统具有根据本发明的悬臂旋转式起重机和至少一个布置在元件处的,特别是承载装置和/或负载接收装置和/或由该负载接收装置接收的负载处的目标标记,用于检测元件的横向实际位置。这使得对为此而考虑的元件的横向实际位置的特别可靠的检测成为可能。
37.本发明还涉及一种用于减少,优选消除或避免悬挂在悬臂旋转式起重机的至少一条提升绳索处的元件的钟摆运动的方法,该元件采用承载装置和/或负载接收装置和/或由该负载接收装置接收的负载的形式,其中该至少一条提升绳索在悬臂旋转式起重机的悬臂处在其悬臂尖的区域中转向,其中借助布置在悬臂尖的区域中的摄像机检测元件的横向实
际位置,并且借助控制装置确定元件的横向实际位置与横向设定位置之间的相对位移,并且基于相对位移,为用于使悬臂围绕水平变幅轴枢转的驱动装置和/或用于使悬臂围绕垂直旋转轴线旋转的驱动装置和/或用于提升或下降元件的驱动装置确定控制指令,并且优选地发送到相应的驱动装置,以便减少,优选地完全消除或避免相对位移。在这种情况下,根据本发明设置为,借助角度传感器检测摄像机轴线与重力轴线的角度偏差,并且基于该角度偏差进行由摄像机检测到的横向实际位置的优选地通过计算的校正,并且随后确定元件的校正过的横向实际位置与横向设定位置之间的相对位移。
38.有利地可设置为,根据元件处的至少一个目标标记或根据元件的至少一个轮廓检测横向实际位置。
39.特别有利地设置为,借助摄像机和根据元件处的该至少一个目标标记或根据元件的该至少一个轮廓以及借助控制装置确定元件与悬臂尖之间的距离,以便确定提升绳索的自由长度,并且为用于使悬臂围绕水平变幅轴枢转的驱动装置和/或用于使悬臂围绕垂直旋转轴线旋转的驱动装置和/或用于提升或下降元件的驱动装置确定控制指令。
40.在这种情况下,该至少一个目标标记和/或该至少一个轮廓的尺寸是已知的,从而使得借助由摄像机检测到的目标标记和/或轮廓能够确定目标标记和/或轮廓与摄像机之间的距离,以及由此能够确定元件与悬臂尖之间的距离。随后,可确定(特别是计算出)也被称为自由钟摆长度的提升绳索的自由长度。
41.本发明的进一步细节从以下根据附图
42.对实施例的描述中得出,其中
43.图1示出了悬臂旋转式起重机的示意图,并且
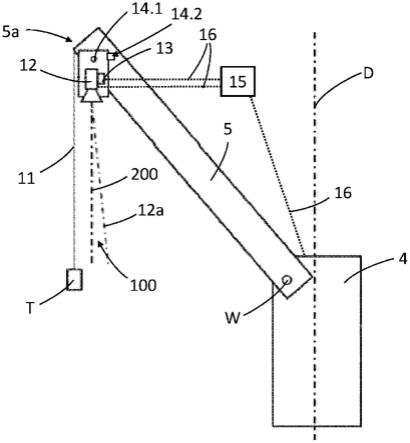
44.图2示出了悬臂旋转式起重机的示意图,该悬臂旋转式起重机具有布置在其悬臂尖处的摄像机。
45.图1示出了悬臂旋转式起重机1的示意图,该起重机采用移动式港口起重机的形式,用于在陆地与水面之间或反之或在集装箱码头内搬运标准化的集装箱,特别是iso集装箱。对应地,悬臂旋转式起重机1设有合适的承载装置t,该承载装置悬挂在其至少一条提升绳索11处,并且可接收负载接收装置lam,在本文中,该负载接收装置被示例性地设计为用于接收iso集装箱或其他标准化集装箱的吊具(spreader)。悬臂旋转式起重机1也可配备用于搬运散装货物的抓具。负载接收装置lam与被示例性设计为iso集装箱的负载l连接。
46.悬臂旋转式起重机1主要包括底部台车2和具有塔4和悬臂5的可选顶部台车3。通常,悬臂旋转式起重机1经由其底部台车2支撑在陆地上,在此支撑在码头7上。悬臂旋转式起重机1可经由具有行走机构6,特别是轮胎行走机构的底部台车2在码头7上移动,并且在搬运操作期间经由支撑装置8,特别是其支架支撑在该码头上。也可能的是,悬臂旋转式起重机1以能够在轨道上移动的方式或以静止方式固定在浮桥上。
47.在底部台车2上安装有可选顶部台车3,旋转机构d可使该顶部台车围绕垂直旋转轴线d,并特别是相对于底部台车2枢转。旋转机构d通常具有与驱动齿轮啮合的旋转环。顶部台车3还承载提升机构h,并在后部区域中承载配重9。
48.在顶部台车3上还支撑有在垂直方向上延伸的塔4,在该塔的尖部处固定有具有绳轮的滑轮头10。此外,在塔4处,大约在塔的一半长度的区域中和背离配重9的一侧铰接有悬臂5。悬臂5能够围绕水平变幅轴w枢转地与塔4连接,并且附加地能够经由在悬臂5处和顶部
台车3处铰接的变幅机构w从其横向突出的运行位置枢转到直立的静止位置,该变幅机构通常被设计为液压缸。此外,悬臂5通常被设计为格构式桅杆。在悬臂5的背离塔4的悬臂尖5a处,能够旋转地安装有一个或几个转向轮,经由这些转向轮,从提升机构h出发,一条或几条提升绳索11经由滑轮头10被引导到悬挂在提升绳索11处的承载装置t。对上述部件和它们的相互连接进行了纯粹示例性的描述,并不是实现本发明的条件,本发明不限于示例性具体描述的移动式港口起重机。
49.根据本发明,在悬臂5的悬臂尖5a处布置和适配有摄像机12(见图2)。另外,悬臂旋转式起重机1包括控制装置15,借助该控制装置特别地可实施根据本发明的方法。
50.图2示出了悬臂旋转式起重机1的示意图,该悬臂旋转式起重机具有布置在其悬臂尖5a处的摄像机12。悬臂旋转式起重机1在其悬臂5的悬臂尖5a的区域中,具有用于至少一条提升绳索11的至少一个转向轮。为了简化说明,在此只示范性地示出了一条提升绳索11。
51.布置在悬臂尖5a的区域中的摄像机12的检测范围指向悬挂在该至少一条提升绳索11处的承载装置t。其中,摄像机12的摄像机轴线12a与重力轴线200基本平行对齐。摄像机12被适配为,例如根据承载装置t的至少一个轮廓,特别是外部轮廓,和/或根据承载装置t处的能够由摄像机12检测的至少一个目标标记,以光学方式检测承载装置t的横向实际位置。随后,借助信号连接16将承载装置t的实际位置发送到控制装置15。
52.控制装置15在悬臂旋转式起重机1处的布置可自由选择。图2中选择的控制装置15的布置只作为简化的示意图。
53.摄像机12围绕第一轴承轴14.1以铰接方式安装,其中第一轴承轴14.1布置为垂直于摄像机轴线12a,在图2的本图示中也垂直于绘图平面。摄像机12围绕第一轴承轴14.1的可旋转性有助于补偿悬臂5围绕水平变幅轴w的枢转运动。因此,使得摄像机轴线12a即便在悬臂5枢转运动时也对齐成为可能。另外,摄像机12可围绕第二轴承轴14.2以铰接方式安装,该第二轴承轴布置为垂直于摄像机轴线12a和第一轴承轴14.1。可选地,为每个轴承轴14.1、14.2设置有旋转接头,该旋转接头使得摄像机12围绕相应的轴承轴14.1、14.2,在两个旋转方向上进行旋转运动成为可能。在这种情况下,将围绕第一轴承轴14.1和第二轴承轴14.2的旋转运动叠加起来是可能的。摄像机12的重心如此布置为与轴承轴14.1、14.2间隔开,使得形成摄像机12的钟摆式悬挂。由此,摄像机轴线12a的对齐通过其自身重量自动进行。借助未示出的阻尼器,特别是扭转阻尼器,阻尼摄像机12的运动,以便使得摄像机轴线12a即便在悬臂5动态运动和/或振动时也与重力轴线200基本平行对齐成为可能。为每条轴承轴14.1、14.2设置有一个阻尼器,从而使得能够阻尼围绕相应轴承轴14.1、14.2的旋转运动。
54.借助布置在摄像机12处的角度传感器13,能够检测摄像机轴线12a与重力轴线200的角度偏差100。角度传感器13检测摄像机12的所有可能的(在本文中为四个)旋转方向上的角度偏差100。这样的角度偏差100例如可以是由摄像机12的振动和/或钟摆运动产生的动态角度偏差100。由于相应的旋转接头和/或阻尼器中或处的摩擦而出现静态的角度偏差100也是可能的。借助信号连接16将角度偏差100发送到控制装置15,其中可以是用于传送承载装置t的被检测到的实际位置的摄像机12的信号连接16,或者另一个单独的信号连接16。
55.例如在适当的评估软件的帮助下,控制装置15确定承载装置t的横向实际位置与
横向设定位置之间的相对位移。该横向设定位置是预定的,并且特别地可自由选择。优选地,承载装置t的重心位于一条虚拟的设定线上的横向设定位置中,该设定线指向重力轴线200的方向,并同时穿过提升绳索11离开转向轮的运行点,或者在有几条提升绳索11和几个转向轮的情况下,穿过由所有运行点形成的线的中心点。
56.借助控制装置15,特别是借助评估软件,在确定相对位移时可对应地考虑到角度偏差100。在这种情况下,由角度传感器13检测到的摄像机轴线12a与重力轴线200的角度偏差100用于校正承载装置t的由摄像机12检测到的横向实际位置,该横向实际位置由于角度偏差100而不正确。
57.基于相对位移,控制装置15为旋转机构d的驱动装置和/或变幅机构w的驱动装置和/或提升机构h的驱动装置确定控制指令,以便减少,优选地完全消除或避免相对位移。借助进一步的信号连接16将控制指令从控制装置15发送到相应的驱动装置。
58.附图标号
[0059]1ꢀꢀꢀꢀꢀꢀꢀ
悬臂旋转式起重机
[0060]2ꢀꢀꢀꢀꢀꢀꢀ
底部台车
[0061]3ꢀꢀꢀꢀꢀꢀꢀ
顶部台车
[0062]4ꢀꢀꢀꢀꢀꢀꢀ
塔
[0063]5ꢀꢀꢀꢀꢀꢀꢀ
悬臂
[0064]
5a
ꢀꢀꢀꢀꢀꢀ
悬臂尖
[0065]6ꢀꢀꢀꢀꢀꢀꢀ
行走机构
[0066]7ꢀꢀꢀꢀꢀꢀꢀ
码头
[0067]8ꢀꢀꢀꢀꢀꢀꢀ
支撑装置
[0068]9ꢀꢀꢀꢀꢀꢀꢀ
配重
[0069]
10
ꢀꢀꢀꢀꢀꢀ
滑轮头
[0070]
11
ꢀꢀꢀꢀꢀꢀ
提升绳索
[0071]
12
ꢀꢀꢀꢀꢀꢀ
摄像机
[0072]
12a
ꢀꢀꢀꢀꢀ
摄像机轴线
[0073]
13
ꢀꢀꢀꢀꢀꢀ
角度传感器
[0074]
14.1
ꢀꢀꢀꢀ
第一轴承轴
[0075]
14.2
ꢀꢀꢀꢀ
第二轴承轴
[0076]
15
ꢀꢀꢀꢀꢀꢀ
控制装置
[0077]
16
ꢀꢀꢀꢀꢀꢀ
信号连接
[0078]
100
ꢀꢀꢀꢀꢀ
角度偏差
[0079]
200
ꢀꢀꢀꢀꢀ
重力轴线
[0080]dꢀꢀꢀꢀꢀꢀꢀ
旋转机构
[0081]dꢀꢀꢀꢀꢀꢀꢀ
旋转轴线
[0082]hꢀꢀꢀꢀꢀꢀꢀ
提升机构
[0083]
l
ꢀꢀꢀꢀꢀꢀꢀ
负载
[0084]
lam
ꢀꢀꢀꢀꢀ
负载接收装置
[0085]
t
ꢀꢀꢀꢀꢀꢀꢀ
承载装置
[0086]wꢀꢀꢀꢀꢀꢀꢀ
变幅机构
[0087]wꢀꢀꢀꢀꢀꢀꢀ
变幅轴
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1