一种搬运机器人
1.本发明涉及机器人领域,更具体的说是一种搬运机器人。
背景技术:
2.对于工厂的搬运工作中,特别是大型产品,除了对于成品的搬运,还需要对成品进行包装,通常是物品在一个区域,包装箱在另一个区域,物品和包装箱需要单独输送集中后在进行包装,然后再进行输送,实现定点大批量,但该方式不适用于少量的灵活生产。
技术实现要素:
3.本发明提供一种搬运机器人,目的是可以适用于少量灵活生产的搬运工作。
4.一种搬运机器人,包括并排设置且对向输送的带式运输机ⅰ和带式运输机ⅱ,其中带式运输机ⅱ能够将物体水平输送至带式运输机ⅰ上,其中带式运输机ⅱ通过直线驱动机构调节高度;还包括移动底盘,所述直线驱动机构安装在所述移动底盘上;
5.还包括与所述带式运输机ⅰ同向运输的带式运输机ⅲ,所述带式运输机ⅲ包括下身架ⅰ,以及两个分别转动连接在下身架ⅰ左右两端的两个辊子ⅱ,以及两个传送带ⅱ,其中一个传送带ⅱ安装在两个辊子ⅱ的前侧,另外一个传送带ⅱ安装在两个辊子ⅱ的后侧,所述带式运输机ⅱ位于两个传送带ⅱ之间,所述带式运输机ⅱ位于两个辊子ⅱ之间,所述下身架ⅰ安装在所述移动底盘上;
6.实现成品后直接包装的同时进行运输,无需跨区域处理,包装与搬运一体设计,使用更为灵活。
附图说明
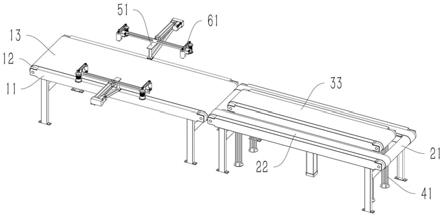
7.图1显示了一种搬运机器人整体结构;
8.图2显示了带式运输机ⅲ;
9.图3显示了带式运输机ⅱ和增稳座的配合;
10.图4至6显示了增稳座;
11.图7显示了协送机构;
12.图8显示了接触机构。
具体实施方式
13.一种搬运机器人,可以参考图1至3所示,包括带式运输机ⅰ、带式运输机ⅱ、直线驱动机构和移动底盘;其中所述式运输机ⅰ设置在带式运输机ⅱ的左侧,具体的:
14.其中,所述带式运输机ⅰ包括上身架11、两个辊子ⅰ12和传送带ⅰ13,两个辊子ⅰ12分别转动连接在上身架11左右两端,传送带ⅰ13套装在两个辊子ⅰ12上,所述辊子ⅰ12通过减速电机ⅰ驱动实现转动,减速电机ⅰ可以安装在上身架11上;
15.其中,所述带式运输机ⅱ包括下身架ⅱ31、两个辊子ⅲ32和传送带ⅲ33;两个辊子
ⅲ
32分别转动连接在下身架ⅱ31的左右两端,传送带ⅲ33套装在两个辊子ⅲ32上,传送带ⅲ33的前右宽度小于传送带ⅰ13的前后宽度;
16.其中,所述直线驱动机构为液压缸34,所述液压缸34的活动端与下身架ⅱ31固接,液压缸34的底壳固接在所述移动底盘上;
17.其中,所述移动底盘优选为履带式移动底盘或麦克纳姆轮式移动底盘,所述上身架11和下身架ⅱ31均固接在所述移动底盘的上端。
18.其中传送带ⅰ13用于运输单开口的包装箱,优选将所述包装箱向右运输,传送带ⅲ33用于运输待包装物品,且使其向左运输;通过启动液压缸34调节下身架ⅱ31的高度以改变传送带ⅲ33的高度,便于将物体送入不同厚度的包装箱内。
19.可以参考图3至6,所述的机器人还包括支柱35和增稳柱,支柱35优选设有2至4个,增稳柱的数量与支柱35的位置对应,具体的:
20.四个支柱35分别固接在下身架ⅱ31下端的四角附近,所述增稳柱包括立架41、环壁42、斜面43、引流槽44、容筒45和塞46;
21.其中,环壁42一体连接在立架41的上端,支柱35滑动连接在环壁42内,斜面43设置在环壁42上端的内圈,多个引流槽44周向均匀设置在环壁42的内壁上且与斜面43相接,容筒45固接在立架41上且与环壁42连通;塞46螺纹连接或插接在容筒45的底部;
22.对于输送重物时,支柱35分摊液压缸34所受的力,避免带式运输机ⅲ整体过长导致重物位于传送带ⅲ33边端时使液压缸34的活动端受到过大的力,其中容筒45内用于储存润滑油,支柱35在升降时带出的润滑油通过引流槽44流回容筒45内,斜面43配合引流槽44可以将润滑油完全收集,不溢出。
23.可将可以参考图1和图2,还包括与所述带式运输机ⅰ同向运输的带式运输机ⅲ,所述带式运输机ⅲ包括:下身架ⅰ21、两个辊子ⅱ22和两个传送带ⅱ23,两个辊子ⅱ22分别转动连接在下身架ⅰ21的左右两端,其中一个传送带ⅱ23套装在两个辊子ⅱ22的前侧,另外一个传送带ⅱ23套装在两个辊子ⅱ22的后侧,所述带式运输机ⅱ位于两个传送带ⅱ23之间,所述带式运输机ⅱ位于两个辊子ⅱ22之间,所述下身架ⅰ21安装在所述移动底盘的上端;所述传送带ⅱ23的上端面与传送带ⅰ13的上端面重合,传送带ⅱ23和传送带ⅰ13的最大间距优选为1cm,传送带ⅲ33能够位于传送带ⅱ23的上方或下方;
24.当物体送入包装箱后,使带式运输机ⅱ下降至传送带ⅱ23下方,从而将包装好的包装箱向右运输,带式运输机ⅲ即传送带ⅱ23接收包装好的包装箱进一步向右运输完成流水线操作;另一方面的,在流水线上操作时,将包装箱开口朝右,一个物体、一个包装箱的交替送至传送带ⅰ13上即可完成包装和运输,例如物体通过传送带ⅰ13优先输送至传送带ⅱ23上,随后带式运输机ⅱ即传送带ⅲ33升高将物体回送回包装箱内。
25.可以参考图7和图8,在图中,所述的机器人,还包括协送机构,所述协送机构包括肩架51,以及安装在肩架51上端的电动伸缩杆52,电动伸缩杆52的活动端朝前设置,以及固接在电动伸缩杆52活动端的臂架53,以及安装在臂架53左右两侧的接触机构;
26.其中,在接触机构中包括基架61,以及转动连接在基架61前端的轴62,以及固接在轴62上的辊子ⅳ63,以及固接在辊子ⅳ63外壁的柔性垫64,以及固接在轴62上端的带轮ⅰ67,以及安装在基架61后侧的电机68,以及与电机68输出轴固接的带轮ⅱ69,带轮ⅰ67和带轮ⅱ69通过同步带传动的连接;
27.所述协送机构前后镜像对称设有两个,两个肩架51分别固接在上身架11上端的前后两侧;
28.通过辊子ⅳ63对包装箱扶正,另一方面通过辊子ⅳ63单独包装箱向右快速运输,增加与物体的包装速度,增加包装效率,并保障物体与包装箱内部的左端贴合,利于与包装箱内的保护泡沫座紧密贴合,且包装后同样起到扶正作用。
29.进一步优选的,所述接触机构还包括固接在基架61上的两个直杆65,以及固接在直杆65尾端的限位片66,所述直杆65滑动连接在臂架53上,直杆65上套有压缩弹簧,所述压缩弹簧的两端分别与臂架53和基架61相抵,限位片66能够压贴在臂架53上;
30.在物体刚进入包装箱后可启动电动伸缩杆52使前后两侧的辊子ⅳ63靠近,前后两侧的辊子ⅳ63接触包装箱,使压缩弹簧进一步压缩,增加辊子ⅳ63与包装箱之间的摩擦力,同时不损坏内部物体实现高效的物体入箱。
技术特征:
1.一种搬运机器人,包括并排设置且对向输送的带式运输机ⅰ和带式运输机ⅱ,其中带式运输机ⅱ能够将物体水平输送至带式运输机ⅰ上,其中带式运输机ⅱ通过直线驱动机构调节高度;还包括移动底盘,所述直线驱动机构安装在所述移动底盘上。2.根据权利要求1所述的机器人,所述带式运输机ⅰ包括上身架(11),以及分别转动连接在上身架(11)左右两端的两个辊子ⅰ(12),以及安装在两个辊子ⅰ(12)上的传送带ⅰ(13),所述辊子ⅰ(12)通过减速电机ⅰ驱动实现转动。3.根据权利要求2或1所述的机器人,所述带式运输机ⅱ包括下身架ⅱ(31),以及分别转动连接在下身架ⅱ(31)左右两端的两个辊子ⅲ(32),以及安装在两个辊子ⅲ(32)上的传送带ⅲ(33),所述辊子ⅲ(32)通过减速电机ⅲ驱动实现转动。4.根据权利要求3所述的机器人,所述直线驱动机构为液压缸(34),所述液压缸(34)的活动端与下身架ⅱ(31)固接。5.根据权利要求4所述的机器人,还包括分别固接在下身架ⅱ(31)下端左右两侧的支柱(35),以及与支柱(35)配合使用的增稳座,所述增稳座包括立架(41),以及设置在立架(41)上端的环壁(42),支柱(35)滑动连接在环壁(42)内。6.根据权利要求5所述的机器人,所述增稳座还包括设置在环壁(42)上端内圈的斜面(43),以及设置在环壁(42)内壁上且与斜面(43)相接的引流槽(44),以及固接在立架(41)上且与环壁(42)连通的容筒(45)。7.根据权利要求6所述的机器人,还包括能够开关容筒(45)底部的塞(46)。8.根据权利要求7所述的机器人,还包括与所述带式运输机ⅰ同向运输的带式运输机ⅲ,所述带式运输机ⅲ包括下身架ⅰ(21),以及两个分别转动连接在下身架ⅰ(21)左右两端的两个辊子ⅱ(22),以及两个传送带ⅱ(23),其中一个传送带ⅱ(23)安装在两个辊子ⅱ(22)的前侧,另外一个传送带ⅱ(23)安装在两个辊子ⅱ(22)的后侧,所述带式运输机ⅱ位于两个传送带ⅱ(23)之间,所述带式运输机ⅱ位于两个辊子ⅱ(22)之间,所述下身架ⅰ(21)安装在所述移动底盘上,所述辊子ⅱ(22)通过减速电机ⅱ驱动实现转动。9.根据权利要求2、4、5、6、7或8任意一项所述的机器人,还包括协送机构,所述协送机构包括肩架(51),以及安装在肩架(51)上的电动伸缩杆(52),以及固接在电动伸缩杆(52)活动端的臂架(53),以及安装在臂架(53)上的接触机构;其中,所述接触机构包括基架(61),以及转动连接在基架(61)上的轴(62),以及固接在轴(62)上的辊子ⅳ(63),以及固接在辊子ⅳ(63)外壁的柔性垫(64),以及固接在轴(62)上端的带轮ⅰ(67),以及安装在基架(61)上的电机(68),以及与电机(68)输出轴固接的带轮ⅱ(69),带轮ⅰ(67)和带轮ⅱ(69)通过同步带传动的连接;所述协送机构前后镜像对称设有两个,两个肩架(51)分别固接在上身架(11)上端的前后两侧。10.根据权利要求9所述的机器人,所述接触机构还包括固接在基架(61)上的两个直杆(65),以及固接在直杆(65)尾端的限位片(66),所述直杆(65)滑动连接在臂架(53)上,直杆(65)上套有压缩弹簧,所述压缩弹簧的两端分别与臂架(53)和基架(61)相抵,限位片(66)能够压贴在臂架(53)上。
技术总结
本发明涉及机器人领域,更具体的说是一种搬运机器人,包括并排设置且对向输送的带式运输机Ⅰ和带式运输机Ⅱ,其中带式运输机Ⅱ能够将物体水平输送至带式运输机Ⅰ上,其中带式运输机Ⅱ通过直线驱动机构调节高度;还包括移动底盘,所述直线驱动机构安装在所述移动底盘上;目的是可以适用于少量灵活生产的搬运工作,实现包装的同时进行搬运。实现包装的同时进行搬运。实现包装的同时进行搬运。
技术研发人员:苏晓光 李美珊
受保护的技术使用者:佳木斯大学
技术研发日:2022.01.05
技术公布日:2022/3/18
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1