一种分布式电液驱动叉车及其系统
1.本发明涉及分布式叉车驱动系统领域技术,具体涉及一种分布式电液驱动叉车及其系统。
背景技术:
2.随着全球贸易的不断加深,以及互联网购物的兴起,不论是全球或是国内的物流行业都迎来了自己的春天,与此同时叉车作为物流业最常用的搬运机械却面临新的挑战。传统叉车通常采用发动机或电机进行驱动,随着节能减排的号召,发动机驱动已经逐渐被电机驱动所代替;其中,现市面上的电动叉车多以蓄电池为能源,通过电机、泵等元件驱动液压系统,完成升降、倾斜、转向等动作,通过电机正反转实现叉车的前进、后退。但其在举升工况中存在较大的节流能量损耗,且下放时未展开势能回收,由此产生较大的能量损失,造成液压油温升高以及产生噪声,影响液压系统的可靠性及寿命。
3.针对上述出现的问题,现有技术的研究是部分采用液压蓄能器展开能量回收,部分则采用新增一套液压马达发电机进行能量回收,部分则直接采用一套电动/发电-泵/马达来实现能量回收。但这些方法均存在不足,一是在实际叉车中,尤其是小吨位叉车,内部空间有限,不论是新增液压蓄能器或是新增液压马达发电机,均不现实且徒增成本;二是在实际工况中,叉车前进、后退以及转向频繁,还伴有偶尔的倾斜调整需求,而绝大部分液压系统的复合动作过程中均难以进行势能回收;其次,在传统升降、倾斜、转向耦合的液压系统中,三者之间存在较为复杂的能量耦合损耗,即单一动作时,如升降动作时,在优先阀处存在较大的压力损耗,导致实际电机输出功率远大于升降实际需求功率,而复合动作时,三者之间能量流紊乱,不仅功耗更甚,也影响着动作的完成度与操控性能。
4.有鉴于此,提出本技术。
技术实现要素:
5.有鉴于此,本发明的目的在于提供一种分布式电液驱动叉车及其系统,能够有效解决现有技术中电液驱动叉车的能量回收方案存在能够回收的能量有限,且在作复合动作时,能量流紊乱,功耗更甚,还影响着动作的完成度与操控性能的问题。
6.本发明公开了一种分布式电液驱动叉车系统,包括供电组件、控制组件、操作组件、液压升降机构、动力缸组件、转向机构以及行车机构;
7.其中,所述供电组件的电源端与所述控制组件的电源端电气连接,所述控制组件的信号端分别与所述操作组件的信号端、所述液压升降机构的信号端、所述动力缸组件的信号端、以及所述行车机构的信号端电气连接;
8.其中,所述动力缸组件包括升降油缸组件、倾斜电动缸组件、以及转向电动缸,所述升降油缸组件与所述液压升降机构连接,所述倾斜电动缸组件的信号端与所述控制组件的信号端电气连接,所述转向电动缸的信号端与所述控制组件的信号端电气连接,所述转向电动缸与所述转向机构刚性铰接;
9.其中,所述升降油缸组件、所述倾斜电动缸组件以及所述转向电动缸相互独立且能够同时运行。
10.优选地,所述供电组件包括蓄电池、以及电池管理模块,所述蓄电池的输出端与所述控制组件的输入端电气连接,所述电池管理模块与所述控制组件电气连接。
11.优选地,所述控制组件包括高压管理模块、以及整车控制器,所述高压管理模块的输入端与所述蓄电池的输出端高压电气连接,所述高压管理模块分别与所述电池管理模块、所述液压升降机构、所述动力缸组件、以及所述行车机构高压电气连接,所述整车控制器分别与所述电池管理模块、所述操作组件、所述液压升降机构、所述动力缸组件、以及所述行车机构can通讯连接。
12.优选地,所述操作组件包括电子手柄、电子方向盘、以及油门刹车踏板,所述电子手柄与所述整车控制器can通讯连接,所述电子方向盘与所述整车控制器can通讯连接,所述油门刹车踏板与所述整车控制器can通讯连接。
13.优选地,所述液压升降机构包括液压油箱、驱动马达、第一电动驱动组件、第一压力传感器、两位三通电磁换向阀、电比例节流阀、第二压力传感器、限速阀、补油单向阀、安全溢流阀、以及第一电机控制器;
14.其中,所述驱动马达与所述第一电动驱动组件同轴连接,所述液压油箱的出油口分别与所述驱动马达的进口、所述补油单向阀的进口液压连接,所述驱动马达的出口分别与所述第一压力传感器、所述两位三通电磁换向阀的第二接口、所述补油单向阀的出口、以及所述安全溢流阀的进口液压连接,所述液压油箱的回油口分别与所述两位三通电磁换向阀的第三接口、所述安全溢流阀的出口、以及所述升降油缸组件的有杆腔液压连接,所述两位三通电磁换向阀的第一接口与所述电比例节流阀的进口液压连接,所述电比例节流阀的出口分别与所述第二压力传感器、以及所述限速阀的进口液压连接,所述限速阀的出口与所述升降油缸组件的无杆腔液压连接,所述第一电动驱动组件与所述第一电机控制器三相电气连接,所述第一电机控制器与所述高压管理模块高压电气连接,所述第一电机控制器与所述整车控制器can通讯连接。
15.优选地,所述升降油缸组件包括第一升降油缸、以及第二升降油缸,所述第一升降油缸的无杆腔与所述限速阀的出口液压连接,所述第一升降油缸的有杆腔与所述液压油箱的回油口液压连接,所述第二升降油缸的无杆腔与所述限速阀的出口液压连接,所述第二升降油缸的有杆腔与所述液压油箱的回油口液压连接。
16.优选地,所述液压升降机构在接收到所述控制组件传递的举升信号和目标转矩时,所述液压升降机构驱动所述升降油缸组件进行举升;所述液压升降机构在接收到所述控制组件传递的下降信号且所述第二压力传感器采集到的压力值小于预设最小压力值时,所述两位三通电磁换向阀的第一接口与所述两位三通电磁换向阀的第三接口导通,所述液压升降机构驱动所述升降油缸组件进行下降;所述液压升降机构在接收到所述控制组件传递的下降信号且所述第二压力传感器采集到的压力值大于预设最小压力值时,所述两位三通电磁换向阀的第一接口与所述两位三通电磁换向阀的第二接口导通,所述液压升降机构进行势能回收并驱动所述升降油缸组件进行下降。
17.优选地,所述倾斜电动缸组件包括第一倾斜电动缸、以及第二倾斜电动缸,所述第一倾斜电动缸与所述高压管理模块高压电气连接,所述第一倾斜电动缸与所述整车控制器
can通讯连接,所述第二倾斜电动缸与所述高压管理模块高压电气连接,所述第二倾斜电动缸与所述整车控制器can通讯连接。
18.优选地,行车机构包括第二电动驱动组件、第二电机控制器、传动组件、行走组件、离合器、机械制动组件,所述第二电动驱动组件与所述传动组件同轴连接,所述传动组件与所述行走组件同轴连接,所述行走组件与所述离合器同轴连接,所述离合器与所述机械制动组件同轴连接,所述第二电动驱动组件与所述第二电机控制器三相电气连接,所述第二电机控制器与所述高压管理模块高压电气连接,所述第二电机控制器与所述整车控制器can通讯连接。
19.本发明还提供了一种分布式电液驱动叉车,包括叉车本体、以及如上任意一项所述的一种分布式电液驱动叉车系统,所述分布式电液驱动叉车系统配置在所述叉车本体上。
20.综上所述,本实施例提供的一种分布式电液驱动叉车及其系统,将市面上通常使用的功率输出需求较小的倾斜液压油缸与转向液压油缸变更为独立的且效率更高的集成式伺服电动缸,保留在频繁动作且大功率输出工况下可靠性更高的升降液压油缸,并采用液压泵/马达和电动/发电机进行驱动,从而实现升降、倾斜、转向的解耦,其中,所述动力缸组件包括了与升降、倾斜、转向三个动作相对应的油缸以及电动缸组件,所述升降油缸组件、所述倾斜电动缸组件以及所述转向电动缸相互独立且能够同时运行,从而解决现有技术中电液驱动叉车的能量回收方案存在能够回收的能量有限,且在作复合动作时,能量流紊乱,功耗更甚,还影响着动作的完成度与操控性能的问题。
附图说明
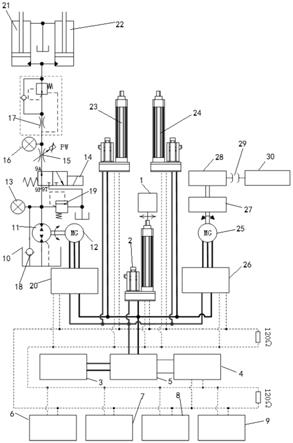
21.图1是本发明实施例提供的分布式电液驱动叉车系统的结构示意图。
具体实施方式
22.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
23.以下结合附图对本发明的具体实施例做详细说明。
24.请参阅图1,本发明的第一实施例提供了一种分布式电液驱动叉车系统,包括供电组件、控制组件、操作组件、液压升降机构、动力缸组件、转向机构1以及行车机构;
25.其中,所述供电组件的电源端与所述控制组件的电源端电气连接,所述控制组件的信号端分别与所述操作组件的信号端、所述液压升降机构的信号端、所述动力缸组件的信号端、以及所述行车机构的信号端电气连接;
26.其中,所述动力缸组件包括升降油缸组件、倾斜电动缸组件、以及转向电动缸2,所
述升降油缸组件与所述液压升降机构连接,所述倾斜电动缸组件的信号端与所述控制组件的信号端电气连接,所述转向电动缸2的信号端与所述控制组件的信号端电气连接,所述转向电动缸2与所述转向机构1刚性铰接;
27.其中,所述升降油缸组件、所述倾斜电动缸组件以及所述转向电动缸2相互独立且能够同时运行。
28.具体地,在本实施例中,所述分布式电液驱动叉车系统综合了现有技术中电动驱动系统效率高、控制精度高以及现有技术中液压驱动系统功率密度大的特点,通过将市面上通常使用的对功率输出需求较小的倾斜液压油缸与转向液压油缸变更为独立的、效率更高的、寿命更长、可靠性更高、安装更方便且速度更加精确平稳的集成式伺服电动缸,以此实现对原本的液压系统进行解耦,保留在频繁动作且大功率输出工况下可靠性更高的升降液压油缸,保证了在长时间、高负荷工作状态下的升降系统的可靠性,并于此基础上实现了对叉车势能展开回收,且基于解耦实现复合动作下展开能量回收,无需新增元器件,也无需更大的安装空间,并采用液压泵/马达和电动/发电机进行驱动,整体系统上从而实现升降、倾斜、转向的解耦,同时以高能量密度动力电池为动力源,行走则依靠电动/发电机进行驱动。通过所述分布式电液驱动叉车系统能够有效减少升降、倾斜、转向三者之间的系统耦合引起的能量损耗,同时也降低了整车布置的难度,优化了整车内部空间利用,并且在保证功能与安全的基础上实现了对电动叉车势能及动能的回收再利用。所述分布式电液驱动叉车系统大大增强了势能回收单元在实际工况中的有效性,延长了单班续航时长,提高了工作效率,满足未来绿色节能高效的发展要求。
29.在本发明一个可能的实施例中,所述供电组件包括蓄电池3、以及电池管理模块4,所述蓄电池3的输出端与所述控制组件的输入端电气连接,所述电池管理模块4与所述控制组件电气连接。
30.在本发明一个可能的实施例中,所述控制组件包括高压管理模块5、以及整车控制器6,所述高压管理模块5的输入端与所述蓄电池3的输出端高压电气连接,所述高压管理模块5分别与所述电池管理模块4、所述液压升降机构、所述动力缸组件、以及所述行车机构高压电气连接,所述整车控制器6分别与所述电池管理模块4、所述操作组件、所述液压升降机构、所述动力缸组件、以及所述行车机构can通讯连接。
31.具体地,在本实施例中,所述高压管理模块5通过强电线路分别给所述分布式电液驱动叉车系统中的用电器分配电流;所述整车控制器6通过can总线与所述分布式电液驱动叉车系统中的用电器进行通讯。
32.在本发明一个可能的实施例中,所述操作组件包括电子手柄7、电子方向盘8、以及油门刹车踏板9,所述电子手柄7与所述整车控制器6can通讯连接,所述电子方向盘8与所述整车控制器6can通讯连接,所述油门刹车踏板9与所述整车控制器6can通讯连接。
33.具体地,在本实施例中,在转向工况中,所述整车控制器6通过解析所述电子方向盘8传递的转角信号,并发出对应信号控制所述转向电动缸2输出对应位移并借由转向机构完成转向动作。
34.在本发明一个可能的实施例中,所述液压升降机构包括液压油箱10、驱动马达11、第一电动驱动组件12、第一压力传感器13、两位三通电磁换向阀14、电比例节流阀15、第二压力传感器16、限速阀17、补油单向阀18、安全溢流阀19、以及第一电机控制器20;
35.其中,所述驱动马达11与所述第一电动驱动组件12同轴连接,所述液压油箱10的出油口分别与所述驱动马达11的进口、所述补油单向阀18的进口液压连接,所述驱动马达11的出口分别与所述第一压力传感器13、所述两位三通电磁换向阀14的第二接口9p、所述补油单向阀18的出口、以及所述安全溢流阀19的进口液压连接,所述液压油箱10的回油口分别与所述两位三通电磁换向阀14的第三接口9t、所述安全溢流阀19的出口、以及所述升降油缸组件的有杆腔液压连接,所述两位三通电磁换向阀14的第一接口9a与所述电比例节流阀15的进口液压连接,所述电比例节流阀15的出口分别与所述第二压力传感器16、以及所述限速阀17的进口液压连接,所述限速阀17的出口与所述升降油缸组件的无杆腔液压连接,所述第一电动驱动组件12与所述第一电机控制器20三相电气连接,所述第一电机控制器20与所述高压管理模块5高压电气连接,所述第一电机控制器20与所述整车控制器6can通讯连接。
36.具体地,在本实施例中,所述升降油缸组件包括第一升降油缸21、以及第二升降油缸22,所述第一升降油缸21的无杆腔与所述限速阀17的出口液压连接,所述第一升降油缸21的有杆腔与所述液压油箱10的回油口液压连接,所述第二升降油缸22的无杆腔与所述限速阀17的出口液压连接,所述第二升降油缸22的有杆腔与所述液压油箱10的回油口液压连接。
37.具体地,在本实施例中,所述液压升降机构在接收到所述控制组件传递的举升信号和目标转矩时,所述液压升降机构驱动所述升降油缸组件进行举升;所述液压升降机构在接收到所述控制组件传递的下降信号且所述第二压力传感器16采集到的压力值小于预设最小压力值时,所述两位三通电磁换向阀14的第一接口9a与所述两位三通电磁换向阀14的第三接口9t导通,所述液压升降机构驱动所述升降油缸组件进行下降;所述液压升降机构在接收到所述控制组件传递的下降信号且所述第二压力传感器16采集到的压力值大于预设最小压力值时,所述两位三通电磁换向阀14的第一接口9a与所述两位三通电磁换向阀14的第二接口9p导通,所述液压升降机构进行势能回收并驱动所述升降油缸组件进行下降。
38.具体地,在本实施例中,在升降工况中,采用电动/发电-泵/马达独立驱动。升举时,所述整车控制器6接收到所述电子手柄7发出的升举信号,通过解析所述升举信号得到所述第一升降油缸21和所述第二升降油缸22的目标举升速度,从最佳经济节能与最佳操控性能的角度出发,计算出对应的所述电比例节流阀15开度与该节流阀前后对应的最小目标压差,而后由所述第一压力传感器13与所述第二压力传感器16得到所述电比例节流阀15前后的实际压力值,并计算出其压力差值,将压力差值与目标压差作闭环计算得出目标转矩或目标转速并发送给所述第一电机控制器20,通过上述方式实现了所述第一电动驱动组件12转速、转矩对货物质量的自适应,以减少举升过程中产生的节流损耗。
39.在本实施例中,下降时,所述整车控制器6接收到所述电子手柄7发出的下降信号,通过解析所述下降信号得到所述第一升降油缸21和所述第二升降油缸22的目标下降速度,其中,与举升时不同的是由于电机发电固有功耗的存在,小质量下放时势能回收效率低,甚至还会有反而耗电的情况出现;因此当所述第二压力传感器16的压力值p
l
小于预设最小压力值p
min
时,所述二位三通电磁换向阀14换位,使得所述二位三通电磁换向阀14的第一接口9a与所述二位三通电磁换向阀14的第三接口9t相通,实现传统的节流下放,此时不进行势
能回收;而只有当所述第二压力传感器16的压力值p
l
大于预设最小压力值p
min
时,则与举升时的控制方式类似,不同在于此时所述第二压力传感器16的压力值较所述第一压力传感器13的压力值来得大,且所述第一电机控制器20控制所述第一电动驱动组件12反转发电,由此实现货物的下放以及回收势能,并将回收的势能储存于所述蓄电池3中,延长单班寿命的同时减少液压系统的温升,保证了液压系统的可靠性。
40.在本发明一个可能的实施例中,所述倾斜电动缸组件包括第一倾斜电动缸23、以及第二倾斜电动缸24,所述第一倾斜电动缸23与所述高压管理模块5高压电气连接,所述第一倾斜电动缸23与所述整车控制器6can通讯连接,所述第二倾斜电动缸24与所述高压管理模块5高压电气连接,所述第二倾斜电动缸24与所述整车控制器6can通讯连接。
41.具体地,在本实施例中,在倾斜工况中,所述整车控制器6通过解析所述电子手柄7传递的开度信号,并发出对应信号给所述第一倾斜电动缸23和所述第二倾斜电动缸24自带的集成式电机控制器,并最终输出对应位移,完成门架及货叉的前倾以及后倾动作。
42.在本发明一个可能的实施例中,行车机构包括第二电动驱动组件25、第二电机控制器26、传动组件27、行走组件28、离合器29、机械制动组件30,所述第二电动驱动组件25与所述传动组件27同轴连接,所述传动组件27与所述行走组件28同轴连接,所述行走组件28与所述离合器29同轴连接,所述离合器29与所述机械制动组件30同轴连接,所述第二电动驱动组件25与所述第二电机控制器30三相电气连接,所述第二电机控制器26与所述高压管理模块5高压电气连接,所述第二电机控制器26与所述整车控制器6can通讯连接。
43.具体地,在本实施例中,在行走工况中,加速时,所述整车控制器6通过解析所述油门刹车踏板9传递的加速信号,得到对应目标整车速度,并控制所述第二电机控制器26输出对应目标转速与目标转矩到所述第二电动驱动组件25,使其输出实际转速与转矩,经过所述传动组件27和所述行走组件28完成加速动作。
44.在本实施例中,制动时,所述整车控制器6通过解析所述油门刹车踏板9传递的制动信号,得到目标制动转矩,并在保证安全制动距离的情况下合理分配到所述机械制动组件30与所述第二电动驱动组件25,实现对叉车动能回收的同时完成制动,延长单班续航时间。
45.具体地,在本实施例中,在复合动作工况中,由于各个执行器之间实现了分布式解耦,执行器之间并不相互干涉,因此复合动作与其他工况相同,由原来复杂的乘除法变成了加减法,因此在倾斜与转向的时候亦不影响叉车的势能及动能回收,大大提升了实际工况中可能量回收的时间,使得原本只在试验台中存在的高回收效率得以成为现实。
46.所述分布式电液驱动叉车系统综合了传统电动化驱动系统和液压驱动系统的优点,针对传统电动叉车未展开势能回收从而导致液压系统温升大,效率低的情况,采用电动/发电-泵/马达的形式完成势能回收以及变转速容积调速,提高了系统效率及单班续航时长,大大延长了叉车的单班续航时长,工作效率更高;其次,由于液压系统功率密度大、惯性小、频响高等特点,因此保留在频繁动作且大功率输出工况下可靠性更高的升降液压油缸,而对功率需求较小的倾斜及转向则替换为电动缸,实现了升降、倾斜、转向的解耦,大大延长了实际工况中能够展开势能回收的时间,使得该系统具备现实意义;再次,所述分布式电液驱动叉车系统采用电动/发电机进行驱动,通过电机正反转实现叉车前进和后退,加速时为电动模式,制动时为发电模式,从而实现对叉车动能进行回收,并且由于在实际工况
中,叉车前进后退切换频繁,因此其可回收的动能相当可观;回收到的动能储存于蓄电池中,从而实现能量流循环,在此基础上,所述分布式电液驱动叉车系统保留机械制动,并行用于保证安全制动,防止制动回收失效从而导致叉车速度不受控制,发生安全事故;最后所述分布式电液驱动叉车系统通过上述分布式驱动系统的方式实现解耦的同时,还减少了由于系统耦合从而产生的能量损耗,进一步提高了整车效率,与此同时还减小了液压系统管路布置的难度,对空间的利用变得更加灵活,而这对小吨位、空间紧凑型叉车尤其关键。
47.本发明的第二实施例提供了一种分布式电液驱动叉车,包括叉车本体、以及如上任意一项所述的一种分布式电液驱动叉车系统,所述分布式电液驱动叉车系统配置在所述叉车本体上。
48.以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1