一种大纸箱开箱设备的制作方法
1.本发明涉及包装设备技术领域,尤其涉及一种大纸箱开箱设备。
背景技术:
2.现有的产品包装生产线一般通过人工进行包装和装箱,这样需要花费大量的人工将对折好的纸箱进行打开和胶装固定,从而导致生产效率低,而且精度较差。
技术实现要素:
3.本发明提供一种有效提高生产效率,提高生产精度,减小人工操作强度,节省人力资源,而且实用性强,适用性广泛的大纸箱开箱设备。
4.本发明采用的技术方案为:一种大纸箱开箱设备,包括:纸箱架、六轴机器人、折边机构、封底机构以及主控系统;所述纸箱架用以堆叠待打开的纸箱,所述六轴机器人安装于所述纸箱架的一侧,且所述六轴机器人上安装有开箱夹具,所述六轴机器人、所述开箱夹具、所述折边机构均与所述主控系统通信连接;所述封底机构包括底架、安装于所述底架顶部的面板以及封底组件,所述封底组件位于所述面板的中间下方,所述封底组件包括固定件、安装于所述固定件的第一胶轮、第二胶轮、胶带座以及刀片;所述胶带座位于所述第二胶轮的下方,用以放置胶带,所述刀片位于所述第一胶轮和所述第二胶轮之间,用以切断胶带;所述固定件包括第一安装侧板、第二安装侧板以及连接在所述第一安装侧板和所述第二安装侧板之间的横杆;所述第一安装侧板的内壁面安装有第一活动杆和第二活动杆,所述第一胶轮安装于所述第一活动杆的顶部,所述第二胶轮安装于所述第二活动杆的顶部;所述面板的中间位置设有开口,所述第一胶轮和所述第二胶轮均穿过所述开口,向上延伸高于所述面板;所述第一活动杆和所述第二活动杆之间连接有连杆,所述连杆上安装有螺栓,所述螺栓与所述第一活动杆之间连接有第一拉簧;所述第一安装侧板的内壁面安装有胶带支架,所述胶带支架位于所述连杆的下方,所述胶带座安装于所述胶带支架的下端;所述第二安装侧板的内壁面安装有安装板,所述安装板上安装有安装支架,所述刀片安装于所述安装支架上,且所述刀片延伸出所述固定件外,所述第二安装板的内壁面与所述安装板之间连接有第二拉簧。
5.进一步地,所述第一安装侧板的内壁面靠近所述胶带支架的位置设有滚轮以及胶辊;所述第二活动杆的内侧安装有导向辊;所述第一安装侧板的内壁面靠近所述第二活动杆的位置设有安装轴,所述安装轴上设有导向支架,所述导向支架朝向所述导向辊的方向设有倾斜面;胶带放置在所述胶带座上,绕过所述胶辊,从所述滚轮穿过,经过所述导向支架到达所述导向辊,绕过所述第二胶轮,到达所述第一胶轮,所述刀片位于胶带的下方。
6.进一步地,所述第一安装侧板的内壁面设有限位块,所述限位块位于所述连杆的下方。
7.进一步地,所述第一安装侧板和所述第二安装侧板之间连接有六方轴,所述六方
轴靠近所述第一活动杆设置,且所述六方轴上安装有毛刷。
8.进一步地,所述开箱夹具包括第一夹具框架、翻转连接座以及第二夹具框架;所述第一夹具框架上安装有机器人连接板,用以与所述六轴机器人连接;所述第一夹具框架上安装有开箱气缸,所述开箱气缸的伸出轴与所述翻转连接座机械连接,所述第二夹具框架安装于所述翻转连接座。
9.进一步地,所述第一夹具框架靠近所述第二夹具框架的一端安装有第一连接板,所述第二夹具框架靠近所述第一连接板的一端安装有第二连接板,所述第一连接板和所述第二连接板之间连接有第一转轴。
10.进一步地,所述第一夹具框架以及所述第二夹具框架上均安装有多个安装座,每一个所述安装座上均安装有吸取组件,每一个所述吸取组件包括吸盘以及第一缓冲杆;所述第一缓冲杆安装于所述安装座,所述吸盘安装于所述第一缓冲杆,且所述吸盘连接至一真空发生器。
11.进一步地,所述第一夹具框架上安装有感应组件,所述感应组件包括接近块、第二缓冲杆、压缩弹簧以及传感器;所述第一夹具框架上设有安装件,所述第二缓冲杆安装于所述安装件,所述接近块安装于所述第二缓冲杆的下端,所述压缩弹簧套设在所述第二缓冲杆上,且所述压缩弹簧的一端抵接所述接近块,另一端抵接所述第二缓冲杆的上端;所述传感器安装于所述安装件,并靠近所述第二缓冲杆设置。
12.进一步地,所述折边机构包括机架、导向架以及两个长边折边组件;所述导向架安装于所述机架的中间位置,两个所述长边折边组件呈轴对称设置于所述机架的两侧,所述导向架位于两个所述长边折边组件之间;所述导向架包括具有坡度的弧形折边部以及与所述弧形折边部连接的水平部,所述封底机构设于所述机架远离所述弧形折边部的一端,靠近所述水平部。
13.进一步地,每一个所述长边折边组件包括四个旋转气缸、两条第二转轴以及两块挡板;其中两个所述旋转气缸安装于所述机架的一端,另两个所述旋转气缸安装于所述机架的另一端,且四个所述旋转气缸的伸出轴均连接有旋转臂;每一条所述第二转轴的两端分别与每一个所述旋转臂机械连接;每一块所述挡板安装于每一条所述第二转轴上,且两块所述挡板均远离所述封底机构设置。
14.相较于现有技术,本发明的大纸箱开箱设备通过在封底机构设置封底组件,封底组件包括固定件、安装于固定件的第一胶轮、第二胶轮、胶带座以及刀片;其中,胶带座位于第二胶轮的下方,用以放置胶带,且胶带可以随时更换,方便快捷;刀片位于第一胶轮和第二胶轮之间,用以切断胶带;从而实现纸箱底部折缝的自动封闭,有效提高生产效率,降低生产成本。
附图说明
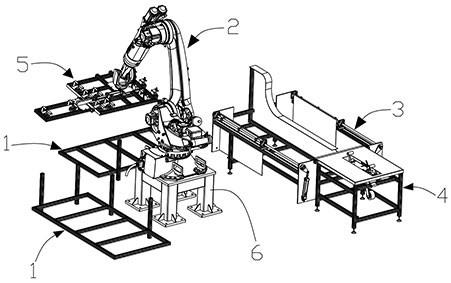
15.附图是用来提供对本发明的进一步理解,并构成说明书的一部分,与下面的具体实施方式一起用于解释本发明,但不应构成对本发明的限制。在附图中,图1:本发明大纸箱开箱设备的立体图;图2:本发明夹具的立体图;图3:本发明夹具的另一立体图;
图4:本发明折边机构和封底机构的立体图;图5:本发明封底组件的立体图;图6:本发明封底组件的俯视图;图7:本发明大纸箱开箱设备吸取纸箱状态的示意图;图8:本发明大纸箱开箱设备打开纸箱状态的示意图;图9:本发明大纸箱开箱设备纸箱折边状态的示意图;图10:本发明大纸箱开箱设备纸箱封底状态的示意图。
具体实施方式
16.以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
17.如图1所示,本发明的大纸箱开箱设备包括纸箱架1、六轴机器人2、折边机构3、封底机构4以及主控系统;其中,纸箱架1用以堆叠待打开的纸箱,六轴机器人2安装于纸箱架1的一侧,且六轴机器人2上安装有开箱夹具5,用以夹取纸箱架1上待打开的纸箱,并将纸箱打开。六轴机器人2、开箱夹具5、折边机构3均与主控系统通信连接。折边机构3安装于六轴机器人2的一侧,纸箱打开后由六轴机器人2输送至折边机构3,通过折边机构3将打开的纸箱底部的短边和长边进行折边。纸箱折边后由六轴机器人2输送至封底机构4,通过封底机构4将纸箱的底部封闭。
18.本实施例中,设有两个纸箱架1,可以理解的,其它实施例中,还可以仅设置一个纸箱架1或者是三个以上的纸箱架1,并不以此为限。
19.如图1至图3所示,具体的,六轴机器人2通过底座6安装于地面上,开箱夹具5安装于六轴机器人2的活动端。开箱夹具5包括第一夹具框架501、翻转连接座502以及第二夹具框架503;其中,第一夹具框架501上安装有机器人连接板504,用以与六轴机器人2连接;翻转连接座502连接第一夹具框架501和第二夹具框架503。具体为:第一夹具框架501上通过一固定座505安装有开箱气缸506,开箱气缸506的伸出轴通过第一鱼眼接头507与翻转连接座502连接,第二夹具框架503安装于翻转连接座502。
20.进一步,第一夹具框架501靠近第二夹具框架503的一端安装有第一连接板508,第二夹具框架503靠近第一连接板508的一端安装有第二连接板509,第一连接板508和第二连接板509之间连接有至少一个第二鱼眼接头510,第二鱼眼接头510上安装有第一转轴511,以便于第二夹具框架503相对第一夹具框架501进行摆动。
21.第一夹具框架501以及第二夹具框架503上均安装有多个安装座512,每一个安装座512上均安装有吸取组件,用以吸取纸箱架1上的纸箱。每一个吸取组件包括吸盘513以及第一缓冲杆514;其中,第一缓冲杆514安装于安装座512,吸盘513安装于第一缓冲杆514,且吸盘513连接至一真空发生器,由真空发生器控制吸盘513。
22.此外,第一夹具框架501上安装有感应组件,用以感应开箱夹具5是否吸取有纸箱。感应组件包括接近块、第二缓冲杆515、压缩弹簧516以及传感器517;第一夹具框架501上设有安装件519,第二缓冲杆515安装于安装件519,接近块安装于第二缓冲杆515的下端,压缩弹簧516套设在第二缓冲杆515上,且压缩弹簧516的一端抵接接近块,另一端抵接第二缓冲杆515的上端。传感器517安装于安装件519,并靠近第二缓冲杆515设置。当接近块碰到纸箱
后通过第二缓冲杆515回缩,传感器517检测到位后,吸取组件吸取待打开的纸箱,从而有效提高开箱精度。
23.本实施例中,第一夹具框架501和第二夹具框架503均为铝型材框架,可以理解的,其它实施例中,第一夹具框架501和第二夹具框架503还可以是塑胶框架、橡胶框架、或者其它金属框架(如:不锈钢框架),第一夹具框架501和第二夹具框架503的材料可以根据实际生产的情况而定,并不以此为限。
24.如图2、图7和图8所示,本发明的开箱夹具5工作原理如下:通过主控系统控制六轴机器人2将开箱夹具5输送至纸箱架1,此时的开箱夹具5处于展开状态(即:开箱气缸506的伸出轴处于伸出状态);然后由主控系统控制多个吸取组件吸取纸箱,当感应组件感应到开箱夹具5上有纸箱时,主控系统控制开箱气缸506的伸出轴缩回,使得第二夹具框架503绕第一转轴511旋转,此时,第一夹具框架501与第二夹具框架503呈90
°
夹角,从而将纸箱打开。
25.如图4和图7所示,折边机构3包括机架301、导向架302以及两个长边折边组件;其中,导向架302安装于机架301的中间位置,两个长边折边组件呈轴对称设置于机架301的两侧,且导向架302位于两个长边折边组件之间。
26.具体为:导向架302包括具有坡度的弧形折边部303以及与弧形折边部303连接的水平部304,封底机构4设于机架301远离弧形折边部303的一端,靠近水平部304。
27.每一个长边折边组件包括四个旋转气缸305、两条第二转轴306以及两块挡板307;其中两个旋转气缸305安装于机架301的一端,另两个旋转气缸305安装于机架301的另一端,且四个旋转气缸305的伸出轴均连接有旋转臂308。每一条第二转轴306的两端均通过轴承座309分别与每一个旋转臂308机械连接。每一块挡板307安装于每一条第二转轴306上,且两块挡板307均远离封底机构4设置。
28.如图4和图9所示,本发明的折边机构3的工作原理如下:通过主控系统控制六轴机器人2将打开的纸箱回输送至导向架302的位置,然后由六轴机器人2来回摆动纸箱,使得弧形折边部303将纸箱底部的短边进行折边;然后由六轴机器人2将纸箱输送至水平部304,此时,四个旋转气缸305同时启动,驱动两条第二转轴306旋转,带动两块挡板307同时向上旋转,将纸箱底部的两条长边进行折边,从而完成纸箱底部的折边。
29.如图4至图6所示,封底机构4包括底架401、安装于底架401顶部的面板402以及封底组件,封底组件位于面板402的中间下方,且面板402的中间位置设有开口403,封底组件至少部分穿过开口403,向上延伸高于面板402。
30.封底组件包括固定件、安装于固定件的第一胶轮404、第二胶轮405、胶带座406以及刀片407;其中,胶带座406位于第二胶轮405的下方,用以放置胶带,且胶带可以随时更换,方便快捷。刀片407位于第一胶轮404和第二胶轮405之间,用以切断胶带。
31.具体为:固定件包括第一安装侧板408、第二安装侧板409以及连接在第一安装侧板408和第二安装侧板409之间的横杆410。第一安装侧板408的内壁面安装有第一活动杆411和第二活动杆412,第一胶轮404安装于第一活动杆411的顶部,靠近水平部304。第二胶轮405安装于第二活动杆412的顶部,且第一胶轮404和第二胶轮405均穿过开口403,向上延伸高于面板402。进一步,第一活动杆411和第二活动杆412之间连接有连杆413,从而同步第
一胶轮404和第二胶轮405的运动。连杆413上安装有螺栓414,且螺栓414与第一活动杆411之间连接有第一拉簧415,用以为第一胶轮404以及第二胶轮405提供复位弹力。
32.此外,第一安装侧板408的内壁面安装有胶带支架416,胶带支架416位于连杆413的下方,胶带座406安装于胶带支架416的下端。第一安装侧板408的内壁面靠近胶带支架416的位置设有滚轮417以及胶辊418,用以引导胶带座406上的胶带通过。进一步,第二活动杆412的内侧安装有导向辊419,用以引导胶带通过。第一安装侧板408的内壁面靠近第二活动杆412的位置设有安装轴420,安装轴420上设有导向支架421,导向支架421朝向导向辊419的方向设有倾斜面,用以引导胶带通过,使得胶带顺利地穿过导向辊419。
33.第二安装侧板409的内壁面安装有安装板422,安装板422上安装有安装支架423,刀片407安装于安装支架423上,且刀片407延伸出固定件外,位于胶带的下方。进一步,第二安装板422的内壁面与安装板422之间连接有第二拉簧424,用以为刀片407提供复位的弹力。
34.除此外,第一安装侧板408的内壁面设有限位块425,限位块425位于连杆413的下方,用以限制连杆413的活动行程,从而限制第一胶轮404和第二胶轮405的活动行程。第一安装侧板408和第二安装侧板409之间连接有六方轴426,六方轴426靠近第一活动杆411设置,且六方轴426上安装有毛刷427。
35.如图5、图6和图10所示,本发明封底组件的工作原理如下:胶带放置在胶带座406上,绕过胶辊418,从滚轮417穿过,经过导向支架421到达导向辊419,绕过第二胶轮405,到达第一胶轮404,刀片407位于胶带的下方;当六轴机器人2输送折底后的纸底部经过第一胶轮404,由于纸箱压着第一胶轮,通过第一拉簧415的弹力,使得胶带紧紧地粘贴于纸箱底部的折缝处;此时,由于纸箱压着第二拉簧424,使得刀片407始终位于胶带的下方;当纸箱过完后,由于第二拉簧424失去压力,刀片407弹起,将胶带切断,第二胶轮405在第一拉簧415的弹力下将胶带紧紧地粘在纸箱底部,从而实现纸箱封底。
36.综上,本发明的大纸箱开箱设备具有以下优点:1、通过在封底机构设置封底组件,封底组件包括固定件、安装于固定件的第一胶轮404、第二胶轮405、胶带座406以及刀片407;其中,胶带座406位于第二胶轮405的下方,用以放置胶带,且胶带可以随时更换,方便快捷;刀片407位于第一胶轮404和第二胶轮405之间,用以切断胶带;从而实现纸箱底部折缝的自动封闭,有效提高生产效率,降低生产成本。
37.2、通过在六轴机器人2上设置开箱夹具5,在开箱夹具5设置与第一夹具框架501旋转连接的第二夹具框架503,且第二夹具框架503可相对第一夹具框架501旋转90
°
;从而使得纸箱的输送和打开实现自动化,无需人工进行开箱,有效提高生产效率,降低生产成本。
38.3、通过在第一夹具框架501上安装感应组件,感应组件包括接近块、第二缓冲杆515、压缩弹簧516以及传感器517;第一夹具框架501上设有安装件519,第二缓冲杆515安装于安装件519,接近块安装于第二缓冲杆515的下端,压缩弹簧516套设在第二缓冲杆515上,且压缩弹簧516的一端抵接接近块,另一端抵接第二缓冲杆515的上端;传感器517安装于安装件519,并靠近第二缓冲杆515设置;当接近块碰到纸箱后通过缓冲杆回缩,传感器517检测到位后,吸取组件吸取待打开的纸箱,从而有效提高开箱精度。
39.4、通过在折边机构3设置导向架302,将两个长边折边组件呈轴对称设置于且导向
架302的两侧;其中,导向架302包括具有坡度的弧形折边部303以及与弧形折边部303连接的水平部304,每一个长边折边组件包括旋转气缸305、第二转轴306以及挡板307;旋转气缸305安装于机架301的一端,第二转轴306的一端与旋转气缸305连接,另一端通过轴承座309安装于机架301的另一端,挡板307安装于第二转轴306;折边时,通过导向架302的弧形折边部303将纸箱底部的短边进行折边,然后四个旋转气缸305同时启动,驱动两条第二转轴306旋转,带动两块挡板307同时向上旋转,将纸箱的两条长边进行折边,从而完成纸箱的折边,无需人工进行折边,有效节省大量人力资源,提高生产效率,降低生产成本。
40.只要不违背本发明创造的思想,对本发明的各种不同实施例进行任意组合,均应当视为本发明公开的内容;在本发明的技术构思范围内,对技术方案进行多种简单的变型及不同实施例进行的不违背本发明创造的思想的任意组合,均应在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1