基于视觉、摆轮技术的邮件柔性整位设备及整位方法与流程
1.本发明涉及物流、邮政设备领域,特别涉及一种基于视觉、摆轮技术的邮件柔性整位设备及整位方法。
背景技术:
2.目前,传统的邮件整位常采用斜滚筒靠边机、斜滚筒居中机、模组带等设备将无序的姿态各异的邮件调整为固定的姿态。这类设备的整位原理均是通过预设的机械结构改变邮件的运行方向来达到整位的目的,且一旦机械安装完毕,则无法调整最终的整位效果,其设备不具备输出效果柔性可调的功能。
3.但随着物流分拣、输送设备行业的快速发展,此类设备已无法满足智能化、柔性化的发展趋势。本发明专利提供一种基于视觉、摆轮技术的邮件柔性整位设备及整位方法以应对当前发展形势。
技术实现要素:
4.本发明的目的是提供能调整邮件运行姿态的基于视觉、摆轮技术的邮件柔性整位设备及整位方法。
5.本发明的目的是这样实现的:基于视觉、摆轮技术的邮件柔性整位设备,包括摆轮和视觉识别控制系统,所述摆轮拥有若干排可独立摆动的滚轮,每个滚轮都可由控制系统命令进行正反向运转,加减速运转;
6.所述视觉识别控制系统由图像采集设备、图像处理器及控制器组成,所述图像采集设备采集摆轮上邮件的图像信息或深度信息,通过图像处理器计算出邮件的位置和姿态,并计算出摆轮转动逻辑,通过控制器将摆轮控制参数发送给摆轮。
7.基于视觉、摆轮技术的邮件柔性整位设备的整位方法,包括以下步骤:
8.s1:当摆轮收到视觉识别控制系统的命令后,实时控制邮件正下方滚轮都朝一个方向转,把整排摆轮旋转一个角度θ,使每一排滚轮与邮件长边平行,在包裹中心线左边的摆轮朝右上角转动,包裹中心线右边的摆轮朝左下角转动,随着邮件姿态的调整,长边角度也随之变化;
9.s2:测试相机根据检测到长边的角度调整整排摆轮的角度,始终让整条摆轮与长边平行,直到长边调整到输出方向;
10.s3:然后根据邮件中心点看邮件是否在摆轮中间,如果不是再将滚轮全部朝中心线方向转动,直到邮件到达摆轮中心位置;
11.s4:当判断邮件到达居中位置后,所有滚轮回正,输出整位后的邮件。
12.优选的,所述摆轮的每排滚轮摆动角度在
±
90
°
范围内且可随控制系统的命令进行实时的正反旋转,加减速控制。
13.优选的,通过所述图像采集设备获取图像,所述图像处理器计算出滚轮到包裹中心点的距离为r,包裹实际中心线和包裹到达最终姿态的中心线夹角角度为θ,角速度ω为
预设值,假设邮件旋转至长边与运行方向平行时间为t0,则:
14.滚轮的速度v=ω*r;
15.旋转时间为t0=θ/ω;
16.即得到t0与速度的关系为t0=(θ*r)/(ω*r),
17.由此滚轮的速度传到给邮件会有损耗,假设损耗系数为μ,则t0=(θ*r)/(ω*r*μ);
18.假设邮件运行到摆轮中心线位置时间t1,邮件中心点离摆轮中心线的距离为s,滚轮速度为v,则t1=s/v,假设损耗系数为μ,则t1=s/(ω*r*μ);
19.假设邮件转动的角速度是ω,由于各个摆轮离邮件中心点的位置不一样,则滚轮的转速就不一样,假设邮件离中心点位置为r,则滚轮线速度v=ω*r。
20.优选的,包裹实际中心线和包裹到达最终姿态的中心线夹角角度与整排摆轮旋转角度一致均为θ。
21.与现有技术相比,本发明有益之处在于:通过将每个摆轮通过系统实时控制转动,使得其可按使用者意愿随时调整需要的邮件整位姿态,且布局灵活,设备集成度高,模块化程度高,应用情景广泛,可适用于例如:单件分离设备出口、邮件导入台前段或嵌于普通传输设备之间等位置,来满足使用者整位的需求。
附图说明
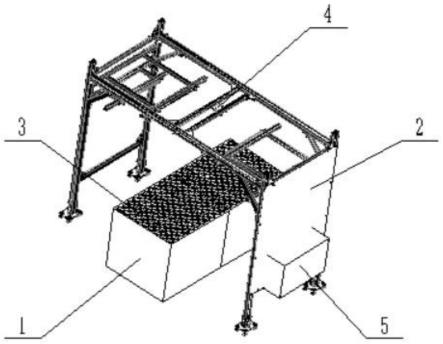
22.图1为本发明整体结构示意图。
23.图2为本发明摆轮初始转动调整图。
24.图3为本发明邮件调整到包裹居中位置图。
25.图4为本发明的摆轮转动调整图。
26.图5为本发明的邮件移动到中心点示意图。
27.图6为本发明滚轮速度设置示意图。
28.图7为本发明的摆轮控制系统流程图。
29.图8为本发明的整体控制系统流程图。
30.其中,1摆轮,2视觉识别控制系统,3滚轮,4图像采集设备,5控制器。
具体实施方式
31.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
32.如图1-8所示,基于视觉、摆轮技术的邮件柔性整位设备,包括摆轮和视觉识别控制系统,摆轮拥有若干排可独立摆动的滚轮,每个滚轮都可由控制系统命令进行正反向运转,加减速运转;
33.视觉识别控制系统由图像采集设备、图像处理器及控制器组成,图像采集设备采集摆轮上邮件的图像信息或深度信息,通过图像处理器计算出邮件的位置和姿态,并计算出摆轮转动逻辑,通过控制器将摆轮控制参数发送给摆轮。
34.基于视觉、摆轮技术的邮件柔性整位设备的整位方法,包括以下步骤:
35.s1:当摆轮收到视觉识别控制系统的命令后,实时控制邮件正下方滚轮都朝一个方向转,把整排摆轮旋转一个角度θ,使每一排滚轮与邮件长边平行,在包裹中心线左边的摆轮朝右上角转动,包裹中心线右边的摆轮朝左下角转动,随着邮件姿态的调整,长边角度也随之变化;
36.s2:测试相机根据检测到长边的角度调整整排摆轮的角度,始终让整条摆轮与长边平行,直到长边调整到输出方向;
37.s3:然后根据邮件中心点看邮件是否在摆轮中间,如果不是再将滚轮全部朝中心线方向转动,直到邮件到达摆轮中心位置;
38.s4:当判断邮件到达居中位置后,所有滚轮回正,输出整位后的邮件。
39.上述摆轮的每排滚轮摆动角度在
±
90
°
范围内且可随控制系统的命令进行实时的正反旋转,加减速控制。
40.通过图像采集设备获取图像,所述图像处理器计算出滚轮到包裹中心点的距离为r,包裹实际中心线和包裹到达最终姿态的中心线夹角角度为θ,角速度ω为预设值,假设邮件旋转至长边与运行方向平行时间为t0,则:
41.滚轮的速度v=ω*r;
42.旋转时间为t0=θ/ω;
43.即得到t0与速度的关系为t0=(θ*r)/(ω*r),
44.由此滚轮的速度传到给邮件会有损耗,假设损耗系数为μ,则t0=(θ*r)/(ω*r*μ);
45.假设邮件运行到摆轮中心线位置时间t1,邮件中心点离摆轮中心线的距离为s,滚轮速度为v,则t1=s/v,假设损耗系数为μ,则t1=s/(ω*r*μ);
46.假设邮件转动的角速度是ω,由于各个摆轮离邮件中心点的位置不一样,则滚轮的转速就不一样,假设邮件离中心点位置为r,则滚轮线速度v=ω*r。
47.包裹实际中心线和包裹到达最终姿态的中心线夹角角度与整排摆轮旋转角度一致均为θ。
48.本发明的工作原理阐述如下:以整位效果为将输入的任意姿态的邮件按长边向前且邮件居中的方式输出为例,当图像采集设备4采集到邮件的图像后,通过像处理器及控制器5计算当前邮件的姿态和位置,判断邮件的长短边,由控制系统计算邮件运行轨迹,并发出信号命令摆轮执行;
49.以整位效果为将输入的任意姿态邮件按长边向前且邮件居中的方式输出为例,当摆轮1收到视觉识别控制系统2的命令后,实时控制邮件正下方滚轮3都朝一个方向转,把整排摆轮旋转一个角度θ,使每一排滚轮与邮件长边平行,在包裹中心线左边的摆轮按图2方向朝右上角转动,包裹中心线右边的摆轮朝左下角转动,随着邮件姿态的调整,长边角度也在变化,测试相机根据检测到长边的角度调整整排摆轮的角度,始终让整条摆轮与长边平行,直到长边调整到输出方向,然后根据邮件中心点看邮件是否在摆轮中间,如果不是再将滚轮全部朝中心线方向转动,如图5所示,直到邮件到达摆轮中心位置。当判断邮件到达居中位置后,所有滚轮3回正,输出整位后的邮件。
50.上面所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的构思和范围进行限定。在不脱离本发明设计构思的前提下,本领域普通人员对本发明的技术
方案做出的各种变型和改进,均应落入到本发明的保护范围,本发明请求保护的技术内容,已经全部记载在权利要求书中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1