一种基于物体识别的智能分类垃圾桶
1.本发明涉及的是一种基于物体识别的智能分类垃圾桶,具体的说,是一种可以实现识别垃圾并进行自动分类,自动检测垃圾装载层度的垃圾桶。
背景技术:
2.虽然人们对于垃圾分类的意识有所改善,但垃圾数目多、难分辨,极容易出现错误,为回收利用造成了极大的困难。目前,垃圾回收站的二次分类大多为人力分类,垃圾的分类回收消耗大量的人力、物力和财力。为了解决这个问题,近几年智能分类垃圾桶的研究逐渐增加,其研究目的是找出可以替代人力垃圾进行分类的完美解决方案。目前,现有的垃圾分类装置多为手动翻盖式或无盖式,并且无法自动检测桶内垃圾的装载程度,实际使用中垃圾过载现象严重,且垃圾桶内气味易外溢,对城市的美观造成了一些负面影响。针对上述问题,本专利发明了一种基于物体识别的智能分类垃圾桶,该垃圾桶可以对垃圾进行识别并自动分类,且可以监控测量桶内垃圾的装载程度。本专利的智能分类垃圾桶贴合国家建设智能化社会综合体的需求,有效的发挥智能化设备为居民提供更好服务的作用,进一步提高了用户的体验,具有巨大的工程应用价值,可以为现代化城市建设添砖加瓦。
技术实现要素:
3.本发明的目的是针对现代化城市建设和垃圾分类回收的迫切需求,设计一种可以对垃圾自动识别分类的智能分类垃圾桶。
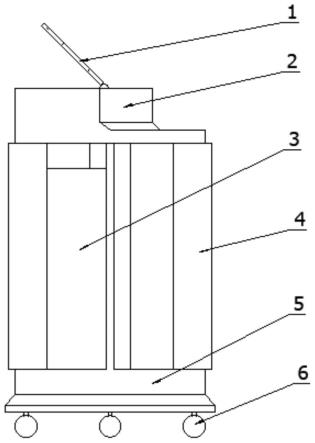
4.为实现上述目的,本发明采用以下的技术方案:一种基于物体识别的智能分类垃圾桶,包括盖体2、内层桶3、侧门4和桶体5。桶体5为主体,内部分成四个区域分别放置四个内层桶3,每个内层桶3放置不同类型垃圾,所述侧门4与桶体5连接,侧门4通过铰链连接固定在桶体5侧面,侧门4可以旋转开启或者关闭,盖体2为可以旋转部分,其中包括顶盖1、驱动装置7和垃圾识别装置10,驱动装置7与中心支撑轴通过轴承连接,盖体2可以在水平面上进行旋转,桶体5通过花键连接中心支撑轴,桶体5可以进行上下拆装,不能在水平方向移动,所述顶盖1通过驱动装置与所述盖体2连接。
5.桶体5底端与万向轮6连接,万向轮6通过螺纹连接固定在桶体5底端,万向轮6具有锁止功能。
6.顶盖1上布放指示灯8和红外检测装置9。盖体上的红外检测装置可检测内层桶内垃圾装载层度,红外检测装置根据反射信号计算垃圾的装载高度,检测到垃圾装满,红外检测装置向信号灯发送信号,盖体上的红色信号灯亮。
7.一种基于物体识别的智能分类垃圾桶的工作流程为:第1步,用户将手放置顶盖红外检测装置上方,红外检测装置检测到信息,控制顶盖驱动装置,打开顶盖;第2步,用户置入垃圾,顶盖自动关闭;第3步,垃圾识别装置对置入垃圾进行识别,判断垃圾的类别,检测结果为四种收
集种类之一;第4步,盖体在驱动装置7中舵机驱动下旋转到固定卡位,驱动装置驱动盖体下口旋开,垃圾落入通体内部的内层桶;第5步,盖体下口复位,盖体旋转到初始位置。
8.一种基于物体识别的智能分类垃圾桶的垃圾识别方法为:第1步,识别装置摄像头拍摄垃圾照片,处理装置获取图像;第2步,处理装置消除图像中无关的信息,得到垃圾的图像信息,增强有关信息的可检测性,最大限度的简化数据,进行归一化处理;第3步,将归一化处理后的数据输入卷积神经网络的隐含层,通过隐含层中卷积层、池化层和全链接层的处理计算,输出每一类的得分,输出层接收数据,使用逻辑函数判断,输出分类标签;第4步,处理器根据卷积神经网络输出的分类标签,判定垃圾倒入哪个内层桶,给旋转装置发出控制信号。
9.一种基于物体识别的智能分类垃圾桶,垃圾的取出方法为:打开对应的侧门,拉出内层桶,将垃圾倾倒出。
10.一种基于物体识别的智能分类垃圾桶,可以实现垃圾的识别并分类。桶体为主体,内部四个区域分别放置四个内层桶,对应着四个垃圾种类,上层为可旋转部分,通过中心轴上与盖体中旋转部件的旋转带动盖体整体旋转。垃圾投入后将进入在盖体的垃圾置口处,此处有摄像头对其进行物体识别,识别完成后将信息发送给控制模块,控制模块控制驱动装置控制盖体旋转到相应卡位,盖体向下旋开后垃圾落入桶体内部内层桶。此外,垃圾顶盖可通过红外识别模块实现自动打开和关闭。
11.本智能分类垃圾桶智能化地为提高了用户的体验,调动了人类垃圾分类的积极性,使得垃圾分类更简单。
12.本专利提供了一种基于物体识别的智能分类垃圾桶,它包括储存部分和识别分类部分;储存部分中包括桶体和四个内层桶,桶体侧面设置有侧门,与桶体采用铰链连接,桶体内部设置有四个垃圾分类腔,以供放置内层桶以及其取放,桶体下端设置有四个万向轮;识别分类部分中包括盖体、顶盖、驱动装置、垃圾识别装置、红外检测装置和指示灯,盖体内部四周为斜面,底部为感应开启落料门,红外检测装置和垃圾识别装置也设置于盖体内部,顶盖固定于盖体上端,驱动装置嵌入盖体所留出的槽中。
13.本专利提供了一种基于物体识别的智能分类垃圾桶,其包括桶体,视觉识别模块,红外识别模块和控制模块。
14.本专利解决了垃圾分类的问题,将人们丢进去的垃圾进行物体识别,并通过管道放入对应的垃圾桶内,(包含可回收垃圾,有害垃圾,易腐垃圾和其他垃圾),调动了人们垃圾分类的积极性。
15.本专利的一种基于物体识别的智能分类垃圾桶,红外检测模块的原理是由红外发射管发出不可见的红外光,红外光经检测面反射后被接收管接收,从而监测到物体。被物体遮挡时,红外模块会改变其电平状态,进而控制模块会做出相应的反应,例如打开垃圾桶盖,检测垃圾桶是否满载。
16.本专利的一种基于物体识别的智能分类垃圾桶,垃圾识别采用基于卷积神经网络
的物体识别过程。
17.卷积神经网络(cnn)是一类包含卷积计算且具有深度结构的前馈神经网络,是一种层次模型。cnn的输入一般是图像,卷积网络通过卷积操作、汇合操作和非线性激活函数映射等一系列的操作层层堆叠,将高层语义信息由原始数据输入层中抽取出来,逐层抽象,这一过程便是前馈运算。更通俗地讲,卷积神经网络操作犹如搭积木的过程,将卷积等操作层作为“基本单元”依次“搭”在原始数据上,逐层堆砌,以损失函数的计算作为过程结束,其中每层的数据形式是一个三维张量。通过利用这种特征,卷积神经网络利用一组分布于图像各个不同位置但具有相同权值向量的单元,来获取图像的特征并构成一幅特征图。并将特征图输入到全连接网络中完成物品识别。
18.1.垃圾进入垃圾桶暂存处后,摄像头捕获暂存处的图像。
19.2.输入层读入图像,消除图像中无关的信息,恢复该垃圾的真实信息,增强有关信息的可检测性和最大限度地简化数据,进行归一化,从而为增强特征抽取、图像分割、匹配和识别的可靠性。
20.3.进入卷积神经网络的隐含层,隐含层包含卷积层、池化层和全连接层3类常见构筑。
21.卷积层的功能是对输入数据进行特征提取,负责提取图像中的局部特征,进行特征提取以及特征映射。卷积神经网路中每层卷积层由若干卷积单元组成,每个卷积单元的参数都是通过反向传播算法优化得到的。卷积运算的目的是提取输入的不同特征,第一层卷积层可能只能提取一些低级的特征如边缘、线条和角等层级,更多层的网络能从低级特征中迭代提取更复杂的特征。通过对输入图像进行多次卷积操作,提取出不同的特征图;然后把当前层的每个单元与前驱层的特征图局部块通过权值建立连接并进行局部加权和非线性变换。
22.池化即层下采样的过程,池化层用来大幅降低参数量级(降维)。通常在卷积层之后会得到维度很大的特征,将特征切成几个区域,取其最大值或平均值,得到新的、维度较小的特征。具体操作是:首先,通过粗粒化各特征的位置,避免相对位置导致所形成主题的微小变化,以此实现主题的可靠检测。其次,每个典型的池化单元通常计算一个或几个特征图内局部块的最大值;而相邻单元则通过行或列平移形成的块来获取输入数据,从而降低特征表达维度,并对平移和扭曲等较小形变具有鲁棒性。
23.全连接层类似传统神经网络的部分,用来输出想要的结果。本层把所有局部特征结合变成全局特征,用来计算最后每一类的得分。
24.4.卷积神经网络中输出层的上游通常是全连接层。对于图像分类问题,输出层使用逻辑函数或归一化指数函数输出分类标签。得到垃圾的预测识别分类结果。
附图说明
25.图1:整体正视图;图2:整体后视图;图3:整体俯视图;图4:整体左视图;图5:桶体三视图;
图6:盖体不同角度视图;图7:内层桶不同角度图。
具体实施方式
26.现结合实施例、附图对本发明做进一步描述:垃圾存入过程(1)用户需要投入垃圾时,将手置于顶盖1上的用户检测装置上方。
27.(2)红外检测装置9将信息反馈顶盖驱动装置,驱动装置驱动顶盖开启,顶盖打开。
28.(3)用户置入垃圾,顶盖1自动关闭。
29.(4)垃圾识别装置10对置入垃圾进行识别,与四种收集种类进行匹配。
30.(5)盖体1在舵机驱动下旋转到固定卡位。
31.(6)盖体下口旋开,垃圾落入桶体内部内层桶。
32.(7)盖体1上的红外检测装置检测内层桶垃圾高度,判断内层桶内垃圾是否装满,如果装满,发送信号给信号指示灯8,红灯亮。
33.(8)盖体1旋转回到初始位置。
34.垃圾的取出过程用户需要将分类完毕的垃圾取出时,打开对应的侧门,拉出内层桶,将垃圾取出。
35.垃圾桶各部件位置关系桶体5为主体,底端与四个具有锁止功能的万向轮6相接,内部四个区域分别放置四个内层桶3,通过四个侧门4的打开与关闭取放垃圾,上层为可旋转部分,通过中心轴上与盖体2中驱动装置7的旋转实现带动盖体整体旋转,盖体垃圾置口安装有垃圾识别装置10,顶部为驱动装置舵机及电池组存放槽,顶盖1通过铰链连接在盖体上实现使用时的开启与关闭。
36.本专利的一种基于物体识别的智能分类垃圾桶的有益效果如下:(1)自动识别垃圾并进行自动分类。将垃圾丢入垃圾桶后,在垃圾桶内部设有视觉识别模块,将对垃圾进行识别,对其所属种类进行判断,随后将其自动放到所属分类的垃圾桶中。
37.(2)可自动识别内部状态。利用红外装置检测桶是否装满,当红外装置检测到垃圾装满则触发满载警报.(3)实时显示当前垃圾桶状态。实时显示垃圾桶是否满载,垃圾桶顶部有信号灯,当红色信号灯亮起,表示垃圾桶已满。
38.(4)红外传感开盖。在垃圾桶顶部装有一个红外传感器,人通过在其上部挥动手臂或停留一段时间,使传感器采集到信号传到中央处理器,打开桶盖,将垃圾丢入后,桶盖会自动关闭。
39.(5)垃圾桶采用圆柱形,内部有四个不同的分类区域,(包含可回收垃圾,有害垃圾,易腐垃圾和其他垃圾)减少占用空间,提高空间的利用率。
40.(6)自动开关的垃圾桶盖和关闭的隔板可以将垃圾桶与外界隔绝,避免垃圾桶内气体外溢。
41.以上所述为本专利实施方式和有益效果,凡依本专利申请范围所述的构造、特征
及原理所做的等效变化或修饰,均属于本专利权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1