一种搬运机器人模组的制作方法
1.本发明涉及机器人技术领域,特别涉及一种搬运机器人模组。
背景技术:
2.搬运机器人被广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、码垛搬运、集装箱等的自动搬运。部分发达国家已制定出人工搬运的最大限度,超过限度的必须由搬运机器人来完成。目前市场上货物搬运机器人在搬运货物时大部分采用人工操作将货物放置在搬运机器人上,由搬运机器人进行运输工作,当操作员工作失误将不同类型货物放到搬运机器人上时,搬运机器人无法判断货物信息,导致不同类型货物混乱堆积,影响后续货物数量统计和货物搬运的工作效率。
技术实现要素:
3.为克服目前的操作员工作失误造成货物搬运错误的技术问题,本发明提供了一种搬运机器人模组。
4.本发明提供了一种搬运机器人模组,其包括底座、伸缩箱、平台、运输架、控制器、ai视觉模组、称重模块和电池模组,所述伸缩箱底部与所述底座固定连接,所述伸缩箱顶部与所述平台固定连接,所述平台一端与所述运输架固定连接,所述控制器和所述称重模块固定连接所述底座内部,所述电池模组固定连接所述伸缩箱内部,所述伸缩箱一端固定连接所述ai视觉模组,所述ai视觉模组与所述运输架位置相对应,所述电池模组、所述ai视觉模组和所述称重模块分别电性连接所述控制器;所述ai视觉模组包括ccd模块和ai芯片模块,所述ccd模块与所述ai芯片模块分别设在电路板上,所述ccd模块与所述ai芯片模块分别电性连接电路板,所述电路板与所述控制器电性连接;工作时,所述ai视觉模组识别货物信息,所述伸缩箱进行升降调节所述平台高度,使所述运输架位置对应运输货物放置的位置,通过所述运输架将货物进行装卸货物操作,称重模块检测货物重量信息。
5.优选地,所述底座底部设有4个万向轮,所述万向轮与所述底座活动连接,每2个所述万向轮设为一组,所述底座内设有转向电机和驱动电机,靠近所述运输架的一组所述万向轮通过连杆连接,另一组所述万向轮通过螺杆连接,所述转向电机与所述连杆通过齿轮啮合活动连接,所述驱动电机与所述螺杆通过齿轮啮合活动连接,所述驱动电机电性连接所述电池模组和所述控制器。
6.优选地,所述伸缩箱包括伸缩壁、第一电机、轨道和活动块,所述伸缩臂设置2段以上伸缩结构,所述第一电机设置1个以上,任一相邻伸缩结构滑动连接,所述第一电机为直线电机,所述第一电机动子与活动块固定连接,所述第一电机定子固定连接所述轨道,所述第一电机电性连接所述电池模组和所述控制器。
7.优选地,所述平台包括本体、第二电机和推板,所述第二电机放置于所述本体内,所述第二电机与所述本体固定连接,所述第二电机通过丝杆与所述推板活动连接,所述丝杆一端与所述第二电机转子固定连接,所述丝杆另一端通过轴承与所述本体活动连接,所
述推板与所述丝杆连接处设置与所述丝杆对应螺纹,所述推板一端设置在所述本体内,所述推板底部与所述本体滑动连接,所述推板顶部环形设置在所述本体顶部,所述推板顶部靠近所述运输架一侧设置轻触开关,所述第二电机电性连接所述电池模组,所述轻触开关和所述第二电机分别电性连接所述控制器。
8.优选地,所述运输架包括第三电机、传送带、2个旋转轴和铲板,所述传送带分别通过所述旋转轴环形运动,所述旋转轴之间通过支架活动连接,所述支架一端固定连接所述平台,所述支架另一端固定连接所述铲板一端,所述铲板两侧夹角为15
°
至5
°
任一角度,所述铲板为钨钢制成,所述支架远离所述平台一端通过支撑臂固定连接所述伸缩箱顶部,所述第三电机与靠近所述平台的所述旋转轴通过连杆活动连接,所述第三电机分别电性连接所述电池模组和所述控制器。
9.优选地,所述称重模块为称重传感器,所述称重模块接收所述控制器信号后记录当前称重测量数值,并将该测量数值信号发送至所述控制器。
10.优选地,所述ai芯片模块型号为hi3519v100,所述ccd模块将实时检测到的图像信号发送至所述ai芯片模块,所述ai芯片模块将预先储存在卷积神经网络模型内的标准图像信号与接收到的图像信号进行对比,所述ai芯片模块将对比结果发送至所述控制器。
11.优选地,所述控制器包括主控芯片、无线蓝牙模块、储存芯片和主控电路,所述主控芯片、所述无线蓝牙模块和所述储存芯片分别电性连接所述主控电路,所述储存芯片用于储存工作参数,所述主控芯片根据所述ai视觉模组发送的信号控制所述伸缩箱、所述运输架、所述底座、所述称重模块组进行工作,所述主控芯片检测所述电池模组电量信息,所述主控芯片将所述电量信息通过所述无线蓝牙模块发送至上位机,所述主控芯片信号为stm32f101vbt6。
12.优选地,所述电池模组为锂电池,所述电池模组为所述底座、所述伸缩箱、所述平台、所述运输架、所述控制器、所述ai视觉模组和称重模块提供工作电能。
13.与现有技术相比,本发明提供的一种搬运机器人模组,具有以下优点:1、一种搬运机器人模组,通过所述运输架上的所述铲板和所述传送带,可以快速将货物移动至所述平台,或者将货物由所述平台移动至货物放置区域,所述支撑臂固定支撑传送带,确保传送带有序工作,避免传送带被货物压坏,所述铲板起平稳装卸货物作用。
14.2、所述底座设置所述万向轮、所述转向电机和所述驱动电机,使所述搬运机器人模组可以多角度移动,便于所述搬运机器人模组快速移动至对应货物区域,优化货物搬运时间。
15.3、所述平台设置的所述推板固定连接有轻触开关,当货物挤压到轻触开关时,所述第三电机停止工作,避免货物挤压坏所述推板,从所述平台一端掉落,当需要将货物从所述平台移动至货架时,所述第二电机工作,通过所述推板将货物推送至货架。
16.4、所述ai视觉模组识别货物信息和货架信息,将识别的货物信息和货架信息与需要搬运的相关信息进行对比,将搬运的货物按照预设的信息搬运至对应的货架放置,避免装卸货物时将货物信息与货架信息不对应,导致数量统计和货物搬运出现错误。
17.5、所述电池模组为锂电池,优化搬运机器人模组自身重量,增加搬运机器人模组工作时长。
18.6、所述控制器通过无线蓝牙模块与上位机进行信号交换,将所述底座、所述伸缩
箱、所述平台、所述运输架、所述控制器、所述ai视觉模组和所述称重模块工作时的相关信息发送至上位机,工作人员可以实时从上位机监控实时搬运机器人工作详情。
19.7、所述称重模块检测货物重量,当所述推板轻触开关触发时,称重模块开始检测所述平台上放置货物重量,并将货物重量信息发送至所述控制器,所述控制器将接收到的重量信息与预存该货物重量信息对比,判断货物是否与规定搬运货物对应,所述称重模块与所述ai视觉模组双重检测货物信息,增加货物搬运至对应货架的正确率。
20.附图说明
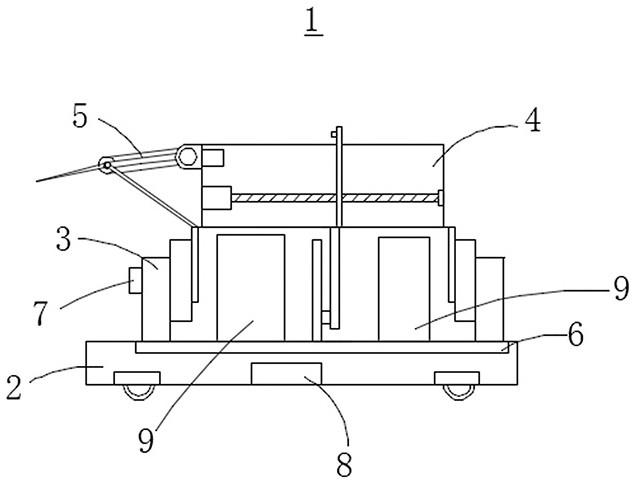
21.图1是本发明提供的一种搬运机器人模组的剖面结构示意图;图2是本发明提供的一种搬运机器人模组的整体剖面结构示意图;图3是本发明提供的一种搬运机器人模组的侧面结构示意图;图4是本发明提供的一种搬运机器人模组的工作原理框图。
22.附图标记说明:1、搬运机器人模组;2、底座;21、万向轮;22、转向电机;23、驱动电机;3、伸缩箱;31、轨道;32、第一电机;33、活动块;4、平台;41、推板;42、轻触开关;43、第二电机;44、轴承;45、本体;5、运输架;51、传送带;52、旋转轴;53、铲板;54、第三电机;55、支架;6、称重模块;7、ai视觉模组;8、控制器;9、电池模组。
23.具体实施方式
24.为了使本发明的目的,技术方案及优点更加清楚明白,以下结合附图及实施实例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
25.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
26.请参阅图1至图4,本发明提供了一种搬运机器人模组1,其包括底座2、伸缩箱3、平台4、运输架5、控制器8、ai视觉模组7、称重模块6和电池模组9,伸缩箱3底部与底座2固定连接,伸缩箱3顶部与平台4固定连接,平台4一端与运输架5固定连接,控制器8和称重模块6固定连接底座2内部,电池模组9固定连接伸缩箱3内部,伸缩箱3一端固定连接ai视觉模组7,ai视觉模组7与运输架5位置相对应,电池模组9、ai视觉模组7和称重模块6分别电性连接控制器8;ai视觉模组7包括ccd模块和ai芯片模块,ccd模块与ai芯片模块分别设在电路板上,ccd模块与ai芯片模块分别电性连接电路板;工作时,ai视觉模组7识别货物信息,伸缩箱3进行升降调节平台4高度,使运输架5位置对应运输货物放置的位置,通过运输架5将货物进行装卸货物操作,称重模块6检测货物重量信息。
27.可以理解,控制器8电性连接上位机,工作时,ai视觉模组7识别待运输货物对应的货架,通过运输架5从货架将待运输货物运输至平台4,称重传感器检测货物重量,搬运机器人模组1移动至待放置货物区域,通过运输架5将货物从平台4运输至待放置货物区域,伸缩
箱3根据货物高度位置进行对应升降,调节平台4高度。
28.具体地,底座2底部设有4个万向轮21,万向轮21与底座2活动连接,每2个万向轮21设为一组,底座2内设有转向电机22和驱动电机23,靠近运输架5的一组万向轮21通过连杆连接,另一组万向轮21通过螺杆连接,转向电机22与连杆通过齿轮啮合活动连接,驱动电机23与螺杆通过齿轮啮合活动连接,驱动电机23电性连接电池模组9和控制器8。
29.可以理解,其中一组万向轮21通过连杆连接,转向电机22通过齿轮啮合控制万向轮21进行转向,驱动电机23通过齿轮啮合控制另一组万向轮21进行前进或倒退移动,使搬运机器人模组1可以多角度移动,便于搬运机器人模组1快速移动至对应货物区域,优化货物搬运时间。
30.具体地,伸缩箱3包括伸缩壁、第一电机32、轨道31和活动块33,伸缩臂设置2段以上伸缩结构,第一电机32设置1个以上,任一相邻伸缩结构滑动连接,第一电机32为直线电机,第一电机32动子与活动块33固定连接,第一电机32定子固定连接轨道31,第一电机32电性连接电池模组9和控制器8。
31.可以理解,伸缩结构设置2段以上,实现多种环境货物搬运。例如伸缩结构为3段,第一电机32工作,活动块33与轨道31相对移动,使伸缩箱3延展,增加货物搬运高度。第一电机32垂直设置在伸缩箱3中间位置,避免第一电机32受力不平衡造成损坏。或者第一电机32设有多个,第一电机32分别对应设置在伸缩结构上,使伸缩结构水平升降,避免第一电机32受力不平衡。
32.具体地,平台4包括本体45、第二电机43和推板41,第二电机43放置于本体45内,第二电机43与本体45固定连接,第二电机43通过丝杆与推板41活动连接,丝杆一端与第二电机43转子固定连接,丝杆另一端通过轴承44与本体45活动连接,推板41与丝杆连接处设置与丝杆对应螺纹,推板41一端设置在本体45内,推板41底部与本体45滑动连接,推板41顶部环形设置在本体45顶部,推板41顶部靠近运输架5一侧设置轻触开关42,第二电机43电性连接电池模组9,轻触开关42和第二电机43分别电性连接控制器8。
33.可以理解,平台4设置的推板41固定连接有轻触开关42,当货物挤压到轻触开关42时,第三电机54停止工作,避免货物挤压坏推板41,从平台4一端掉落,当需要将货物从平台4移动至货架时,第二电机43工作,通过推板41将货物推送至货架。工作时,第二电机43将推板41移动至靠近轴承44位置,当轻触开关42受货物挤压启动,轻触开关42向控制器8发送信号,控制器8控制第三电机54停止工作,具体地,运输架5包括第三电机54、传送带51、2个旋转轴52和铲板53,传送带51分别通过旋转轴52环形运动,旋转轴52之间通过支架55活动连接,支架55一端固定连接平台4,支架55另一端固定连接铲板53一端,铲板53两侧夹角为15
°
至5
°
任一角度,铲板53为钨钢制成,支架55远离平台4一端通过支撑臂固定连接伸缩箱3顶部,第三电机54与靠近平台4的旋转轴52通过连杆活动连接,第三电机54分别电性连接电池模组9和控制器8。
34.可以理解,通过运输架5上的铲板53和传送带51,可以快速将货物移动至平台4,或者将货物由平台4移动至货物放置区域,支撑臂固定支撑传送带51,确保传送带51有序工作,避免传送带51被货物压坏,铲板53起平稳装卸货物作用。使用铲板53和传送带51进行装卸货物,避免人工放置货物出现放置错误货物的情况,同时可以避免通过夹取方式夹持货物时,夹持力超过货物受力范围,造成货物损坏。
35.具体地,称重模块6为称重传感器,称重模块6接收控制器8信号后记录当前称重测量数值,并将该测量数值信号发送至控制器8。
36.可以理解,称重模块6检测货物重量,当推板41轻触开关42触发时,称重模块6开始检测平台4上放置货物重量,并将货物重量信息发送至控制器8,控制器8将接收到的重量信息与预存该货物重量信息对比,判断货物是否与规定搬运货物对应,称重模块6与ai视觉模组7双重检测货物信息,增加货物搬运的正确率。
37.具体地,ai芯片模块型号为hi3519v100,ccd模块将实时检测到的图像信号发送至ai芯片模块,ai芯片模块将预先储存在卷积神经网络模型内的标准图像信号与接收到的图像信号进行对比,ai芯片模块将对比结果发送至控制器8。
38.可以理解,ai视觉模组7识别货物信息和货架信息,将识别的货物信息和货架信息与需要搬运的相关信息进行对比,避免装卸货物时出现错误。
39.可以理解,ai视觉模组7可以增加设置距离传感器,距离传感器电性连接控制器8,避免搬运机器人在搬运货物移动时,检测移动路线上的障碍物后自行规避障碍物。
40.具体地,控制器8包括主控芯片、无线蓝牙模块、储存芯片和主控电路,主控芯片、无线蓝牙模块和储存芯片分别电性连接主控电路,储存芯片用于储存工作参数,主控芯片根据ai视觉模组7发送的信号控制伸缩箱3、运输架5、底座2、称重模块6组进行工作,主控芯片检测电池模组9电量信息,主控芯片将电量信息通过无线蓝牙模块发送至上位机,主控芯片信号为stm32f101vbt6。
41.可以理解,控制器8通过无线蓝牙模块与上位机进行信号交换,将底座2、伸缩箱3、平台4、运输架5、控制器8、ai视觉模组7和称重模块6工作时的相关信息发送至上位机,工作人员可以实时从上位机监控实时搬运机器人工作详情。同时储存芯片预存搬运机器人模组1移动线路,使搬运机器人根据移动线路行进,提升搬运机器人模组1工作效率。
42.具体地,电池模组9为锂电池,电池模组9为底座2、伸缩箱3、平台4、运输架5、控制器8、ai视觉模组7和称重模块6提供工作电能。
43.可以理解,使用锂电池可以优化搬运机器人模组1自身重量,增加搬运机器人模组1工作时长。
44.工作原理:搬运机器人模组1装货时,控制器8控制底座2按照预设路线行进至货架位置,ai视觉模组7扫描货架信息,确认货物信息与需要搬运货物信息一致,伸缩箱3进行升降调整,使运输架5与货物对齐,推板41移动至靠近轴承44位置,铲板53插入货物底部,通过传动带51将货物运输至平台4上,货物挤压轻触开关42时,传送带51停止运输,称重模块6对平台4上的货物进行称重,并将称重结果发送至控制器8,控制器8将称重结果与预存货物重量参数对比,二次确认货物信息完成装货。控制器8控制底座2按照预设路线行进至货物待放置区域,伸缩箱3进行升降调整,使运输架5与货物待放置位置,推板41推动货物途径运输架5进行卸货,卸货时,传送带51反向运动完成卸货。
45.与现有技术相比,本发明提供的一种搬运机器人模组1,具有以下优点:1、一种搬运机器人模组1,通过运输架5上的铲板53和传送带51,可以快速将货物移动至平台4,或者将货物由平台4移动至货物放置区域,支撑臂固定支撑传送带51,确保传送带51有序工作,避免传送带51被货物压坏,铲板53起平稳装卸货物作用。
46.2、底座2设置万向轮21、转向电机22和驱动电机23,使搬运机器人模组1可以多角
度移动,便于搬运机器人模组1快速移动至对应货物区域,优化货物搬运时间。
47.3、平台4设置的推板41固定连接有轻触开关42,当货物挤压到轻触开关42时,第三电机54停止工作,避免货物挤压坏推板41,从平台4一端掉落,当需要将货物从平台4移动至货架时,第二电机43工作,通过推板41将货物推送至货架。
48.4、ai视觉模组7识别货物信息和货架信息,将识别的货物信息和货架信息与需要搬运的相关信息进行对比,将搬运的货物按照预设的信息搬运至对应的货架放置,避免装卸货物时将货物信息与货架信息不对应,导致数量统计和货物搬运出现错误。
49.5、电池模组9为锂电池,优化搬运机器人模组1自身重量,增加搬运机器人模组1工作时长。
50.6、控制器8通过无线蓝牙模块与上位机进行信号交换,将底座2、伸缩箱3、平台4、运输架5、控制器8、ai视觉模组7和称重模块6工作时的相关信息发送至上位机,工作人员可以实时从上位机监控实时搬运机器人工作详情。
51.7、称重模块6检测货物重量,当推板41轻触开关42触发时,称重模块6开始检测平台4上放置货物重量,并将货物重量信息发送至控制器8,控制器8将接收到的重量信息与预存该货物重量信息对比,判断货物是否与规定搬运货物对应,称重模块6与ai视觉模组7双重检测货物信息,增加货物搬运至对应货架的正确率。
52.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的原则之内所作的任何修改,等同替换和改进等均应包含本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1