一种吊装设备的方法与流程
1.本发明涉及吊装技术领域,特别涉及一种吊装设备的方法。
背景技术:
2.随着国内经济及工程建设行业的快速发展,工程项目的使用功能日趋多样化,各类高端、大型的设备配备与运用越来越多,设备体量也越来越大,由此带来的吊装难度也越来越高。在工程施工过程中,很多体型大、重量重的设备必须进行吊装安装,常常因场地条件限制无法通过塔吊、吊车等大型吊装装置一次吊运至指定区域,需在楼层内进行转运吊装。特别是对于需要安装在地下楼层的设备而言,吊装孔与大型吊装装置相距较远,且大型吊装装置与设备安装位置在不同的楼层,采用大型吊装装置吊装设备的方法无法适应复杂的吊装环境,导致设备无法一次吊装到安装位置。
技术实现要素:
3.本发明的目的在于提供一种吊装设备的方法,现有的吊装设备的方法吊装设备时环境适应性低的问题。
4.为解决上述技术问题,本发明提供一种吊装设备的方法,用于将设备从室内的吊装口吊装至下层楼板上,包括:通过牵引手拉葫芦牵引设置在地坦克上的设备靠近吊装口的一侧,通过溜尾手拉葫芦牵引设备远离吊装口的一侧;以及,通过牵引手拉葫芦、溜尾手拉葫和地坦克牵引设备向靠近吊装口的方向移动;在设备移动过程中,当设备远离吊装口的一侧移至距离吊装口第一距离时,通过第一电动葫芦吊装设备靠近吊装口的一侧,当设备远离吊装口的一侧移至距离吊装口第二距离时,通过第一电动葫芦和第二电动葫芦吊装设备靠近吊装口的一侧,当设备远离吊装口的一侧移至距离吊装口第三距离时,通过第二电动葫芦吊装设备靠近吊装口的一侧以及第一电动葫芦吊装设备远离吊装口的一侧,当设备远离吊装口的一侧移至距离吊装口第四距离时,通过第二电动葫芦和第三电动葫芦吊装设备靠近吊装口的一侧,第一电动葫芦吊装设备远离吊装口的一侧,当设备位于移至吊装口上方时,第三电动葫芦与设备靠近吊装口的一侧连接,第一电动葫芦与设备远离吊装口的一侧连接,并通过第三电动葫芦和第一电动葫芦将设备吊装至下层楼板上,其中,第一电动葫芦、第二电动葫芦和第三电动葫芦设置在上层楼板上且位于吊装口上方,且第一电动葫芦、第二电动葫芦和第三电动葫芦距离设备靠近吊装口一侧的距离逐渐变大,并且第一距离>第二距离>第三距离>第四距离>第五距离。
5.可选的,所述第一电动葫芦的数量为两个,两个所述第一电动葫芦垂直于设备移动方向布置;所述第二电动葫芦的数量为两个,两个所述第二电动葫芦垂直于设备移动方向布置;所述第三电动葫芦的数量为两个,两个所述第三电动葫芦垂直于设备移动方向布置。
6.可选的,第一电动葫芦、第二电动葫芦和第三电动葫芦通过吊点装置设置在上层楼板上,所述吊点装置包括设置在上层楼板上方的型钢,设置在所述型钢上方的钢棒,开设
在所述上层楼板上的吊孔,一端套设在钢棒上,另一端穿过所述吊孔至上层楼板下方的钢丝绳套,所述钢丝绳套用于吊装第一电动葫芦、第二电动葫芦和第三电动葫芦中的一个。
7.可选的,所述钢棒垂直于所述型钢长度方向设置。
8.可选的,所述型钢为h250。
9.可选的,所述吊点装置还包括设置在所述上层楼板的上表面与型钢之间的枕木。
10.可选的,所述钢棒的直径为60mm,所述钢丝绳套的直径为32mm,吊孔的直径为200mm。
11.可选的,还包括在通过牵引手拉葫芦牵引设置在地坦克上的设备靠近吊装口的一侧,通过溜尾手拉葫芦牵引设备远离吊装口的一侧之前,通过吊车将设备从运输车上起吊,并通过吊车将设备吊装至地坦克上。
12.本发明提供的一种吊装设备的方法,具有以下有益效果:
13.由于仅通过牵引手拉葫芦、溜尾手拉葫、地坦克、第一电动葫芦、第二电动葫芦和第三电动葫芦即可实现将设备从室内的吊装口吊装至下层楼板上,因此该吊装设备方法可适应将设备从室内楼板的吊装口吊装至下层楼板上的复杂吊装环境;并且并未采用大型吊装装置,因此占地面积小,且比较经济;由于采用空中接力的方式将设备从室内的吊装口吊装至下层楼板上,因此吊装效率较高。
附图说明
14.图1是本发明实施例中吊车将设备从运输车上起吊时的示意图,图2是本发明实施例中吊车将设备吊装至地坦克上的示意图;
15.图3是本发明实施例中牵引手拉葫芦牵引设置在地坦克上的设备的靠近吊装口一侧,溜尾手拉葫牵引设备远离吊装口的一侧的示意图;
16.图4是本发明实施例中牵引手拉葫芦牵引设置在地坦克上的设备的靠近吊装口一侧,溜尾手拉葫牵引设备远离吊装口的一侧,以及第一电动葫芦吊装设备靠近吊装口的一侧的示意图;
17.图5是本发明实施例中,牵引手拉葫芦牵引设置在地坦克上的设备的靠近吊装口一侧,溜尾手拉葫牵引设备远离吊装口的一侧,以及第一电动葫芦和第二电动葫芦吊装设备靠近吊装口的一侧的一种示意图;
18.图6是本发明实施例中牵引手拉葫芦牵引设置在地坦克上的设备的靠近吊装口一侧,溜尾手拉葫牵引设备远离吊装口的一侧,以及第一电动葫芦和第二电动葫芦吊装设备靠近吊装口的一侧的另一种示意图;
19.图7是本发明实施例中牵引手拉葫芦牵引设置在地坦克上的设备的靠近吊装口一侧,溜尾手拉葫牵引设备远离吊装口的一侧,第二电动葫芦吊装设备靠近吊装口的一侧以及第一电动葫芦吊装设备远离吊装口的一侧的一种示意图;
20.图8是本发明实施例中牵引手拉葫芦牵引设置在地坦克上的设备的靠近吊装口一侧,溜尾手拉葫牵引设备远离吊装口的一侧,第二电动葫芦和第三电动葫芦吊装设备靠近吊装口的一侧以及第一电动葫芦吊装设备远离吊装口的一侧的一种示意图;
21.图9是本发明实施例中牵引手拉葫芦牵引设置在地坦克上的设备的靠近吊装口一侧,溜尾手拉葫牵引设备远离吊装口的一侧,第二电动葫芦和第三电动葫芦吊装设备靠近
吊装口的一侧以及第一电动葫芦吊装设备远离吊装口的一侧的另一种示意图;
22.图10是本发明实施例中第三电动葫芦吊装设备靠近吊装口的一侧以及第一电动葫芦吊装设备远离吊装口的一侧的示意图;
23.图11是本发明实施例中第一电动葫芦、第二电动葫芦和第三电动葫芦设置在上层楼板上的结构示意图。
24.附图标记说明:
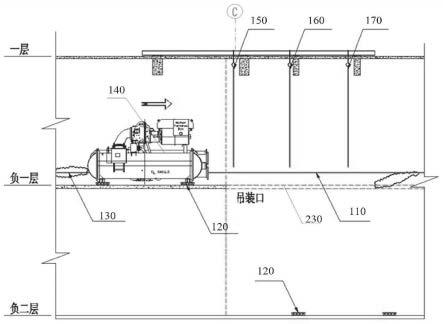
25.110-牵引手拉葫芦;120-地坦克;130-溜尾手拉葫芦;140-设备;150-第一电动葫芦;160-第二电动葫芦;170-第三电动葫芦;180-型钢;190-钢棒;210-吊孔;220-钢丝绳套;230-吊装口;240-上层楼板。
具体实施方式
26.以下结合附图和具体实施例对本发明提出的吊装设备的方法作进一步详细说明。根据下面说明,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
27.参考图1至图10,图1是本发明实施例中吊车将设备140从运输车上起吊时的示意图,图2是本发明实施例中吊车将设备140吊装至地坦克120上的示意图,图3是本发明实施例中牵引手拉葫芦110牵引设置在地坦克120上的设备140的靠近吊装口230一侧,溜尾手拉葫牵引设备140远离吊装口230的一侧的示意图,图4是本发明实施例中牵引手拉葫芦110牵引设置在地坦克120上的设备140的靠近吊装口230一侧,溜尾手拉葫牵引设备140远离吊装口230的一侧,以及第一电动葫芦150吊装设备140靠近吊装口230的一侧的示意图,图5是本发明实施例中,牵引手拉葫芦110牵引设置在地坦克120上的设备140的靠近吊装口230一侧,溜尾手拉葫牵引设备140远离吊装口230的一侧,以及第一电动葫芦150和第二电动葫芦160吊装设备140靠近吊装口230的一侧的一种示意图,图6是本发明实施例中牵引手拉葫芦110牵引设置在地坦克120上的设备140的靠近吊装口230一侧,溜尾手拉葫牵引设备140远离吊装口230的一侧,以及第一电动葫芦150和第二电动葫芦160吊装设备140靠近吊装口230的一侧的另一种示意图,图7是本发明实施例中牵引手拉葫芦110牵引设置在地坦克120上的设备140的靠近吊装口230一侧,溜尾手拉葫牵引设备140远离吊装口230的一侧,第二电动葫芦160吊装设备140靠近吊装口230的一侧以及第一电动葫芦150吊装设备140远离吊装口230的一侧的一种示意图,图8是本发明实施例中牵引手拉葫芦110牵引设置在地坦克120上的设备140的靠近吊装口230一侧,溜尾手拉葫牵引设备140远离吊装口230的一侧,第二电动葫芦160和第三电动葫芦170吊装设备140靠近吊装口230的一侧以及第一电动葫芦150吊装设备140远离吊装口230的一侧的一种示意图,图9是本发明实施例中牵引手拉葫芦110牵引设置在地坦克120上的设备140的靠近吊装口230一侧,溜尾手拉葫牵引设备140远离吊装口230的一侧,第二电动葫芦160和第三电动葫芦170吊装设备140靠近吊装口230的一侧,以及第一电动葫芦150吊装设备140远离吊装口230的一侧的另一种示意图,图10是本发明实施例中第三电动葫芦170吊装设备140靠近吊装口230的一侧以及第一电动葫芦150吊装设备140远离吊装口230的一侧的示意图,本实施例体提供一种吊装设备的方法,用于将设备140从室内的吊装口230吊装至下层楼板上,包括:通过牵引手拉葫芦110牵引设置在地坦克120上的设备140靠近吊装口230的一侧,通过溜尾手拉葫芦130牵引设备140远离吊
装口230的一侧;以及,通过牵引手拉葫芦110、溜尾手拉葫和地坦克120牵引设备140向靠近吊装口230的方向移动,在设备140移动过程中,
28.当设备140远离吊装口230的一侧移至距离吊装口230第一距离时,通过第一电动葫芦150吊装设备140靠近吊装口230的一侧;
29.当设备140远离吊装口230的一侧移至距离吊装口230第二距离时,通过第一电动葫芦150和第二电动葫芦160吊装设备140靠近吊装口230的一侧;
30.当设备140远离吊装口230的一侧移至距离吊装口230第三距离时,通过第二电动葫芦160吊装设备140靠近吊装口230的一侧以及第一电动葫芦150吊装设备140远离吊装口230的一侧;
31.当设备140远离吊装口230的一侧移至距离吊装口230第四距离时,通过第二电动葫芦160和第三电动葫芦170吊装设备140靠近吊装口230的一侧,第一电动葫芦150吊装设备140远离吊装口230的一侧;
32.当设备140位于移至吊装口230上方时,第三电动葫芦170与设备140靠近吊装口230的一侧连接,第一电动葫芦150与设备140远离吊装口230的一侧连接,并通过第三电动葫芦170和第一电动葫芦150将设备140吊装至下层楼板上;
33.其中,第一电动葫芦150、第二电动葫芦160和第三电动葫芦170设置在上层楼板240上且位于吊装口230上方,且第一电动葫芦150、第二电动葫芦160和第三电动葫芦170距离设备140靠近吊装口230一侧的距离逐渐变大,并且第一距离>第二距离>第三距离>第四距离>第五距离。
34.通过将设备140设置在地坦克120上,并通过牵引手拉葫芦110牵引设备140靠近吊装口230的一侧,通过溜尾手拉葫芦130牵引设备140远离吊装口230的一侧,从而可实现设备140在楼板上的平稳移动;通过牵引手拉葫芦110、溜尾手拉葫和地坦克120牵引设备140向靠近吊装口230的方向移动,从而使设备140逐渐向吊装口230移动;当设备140离吊装口230的一侧与吊装口230的距离越来越近,通过第一电动葫芦150、第二电动葫芦160和第三电动葫芦170以空中接力的方式逐渐使设备140进入吊装口230中,直至设备140完全位于吊装口230的上方,之后再将设备140吊装至下层楼板上。
35.本实施例中,由于仅通过牵引手拉葫芦110、溜尾手拉葫、地坦克120、第一电动葫芦150、第二电动葫芦160和第三电动葫芦170即可实现将设备140从室内的吊装口230吊装至下层楼板上,因此该吊装设备140方法可适应将设备140从室内楼板的吊装口230吊装至下层楼板上的复杂吊装环境;并且并未采用大型吊装装置,因此占地面积小,且比较经济;由于采用空中接力的方式将设备140从室内的吊装口230吊装至下层楼板上,因此吊装效率较高。
36.所述第一电动葫芦150的数量为两个,两个所述第一电动葫芦150垂直于设备140移动方向布置。所述第二电动葫芦160的数量为两个,两个所述第二电动葫芦160垂直于设备140移动方向布置。所述第三电动葫芦170的数量为两个,两个所述第三电动葫芦170垂直于设备140移动方向布置。
37.通过牵引手拉葫芦110牵引设置在地坦克120上的设备140靠近吊装口230的一侧,通过溜尾手拉葫芦130牵引设备140远离吊装口230的一侧包括:在吊装口230前、后两个立柱上分别固定两根钢丝绳,与牵引手拉葫芦110和溜尾手拉葫芦130的一端相连接,然后将
溜尾手拉葫芦130和牵引手拉葫芦110的另一端分别连接在设备140的前端(设备140靠近吊装口230的一端)和后端(设备140远离吊装口230的一端)。
38.参考图3,通过牵引手拉葫芦110、溜尾手拉葫和地坦克120牵引设备140向靠近吊装口230的方向移动包括,操作牵引葫芦将设备140缓缓平移至吊装口230边缘位置后暂停移动,溜尾葫芦在后慢慢发力保持设备140平衡移动。在牵引过程中,不断根据设备140前进方向通过地坦克120进行微调,确保设备140按设计路线前进。
39.参考图4,当设备140远离吊装口230的一侧移至距离吊装口230第一距离时,通过第一电动葫芦150吊装设备140靠近吊装口230的一侧包括:使用第一电动葫芦150分别连接至设备140前端两侧的吊装孔处,操作按钮器使其链条慢慢拉紧并发力,待设备140前端略提升离开地面一定距离后暂停第一电动葫芦150,移开前端地坦克120,然后重新开启按钮器,牵引设备140慢慢前进,其前端慢慢跨入吊装口230。其中,第一距离为设备140的长度。
40.参考图5和图6,当设备140远离吊装口230的一侧移至距离吊装口230第二距离时,通过第一电动葫芦150和第二电动葫芦160吊装设备140靠近吊装口230的一侧包括:待设备140前端进入吊装口230边缘200mm左右暂停牵引,使用第二电动葫芦160连接至第一电动葫芦150与设备140前端两侧相连的相同吊装孔处,启动第二电动葫芦160的按钮器使其链条拉紧,然后启动第一电动葫芦150的按钮器,共同牵引设备140向前、向上缓慢移动,使设备140在第一电动葫芦150和第二电动葫芦160的作用下继续向前缓移,至设备140前端距吊装口230边缘1米时停止,缓移过程中注意控制溜尾手拉葫芦130,以确保地坦克120距离吊装口230在安全范围内。其中,第二距离为设备140的长度减200mm。
41.参考图7,当设备140远离吊装口230的一侧移至距离吊装口230第三距离时,通过第二电动葫芦160吊装设备140靠近吊装口230的一侧以及第一电动葫芦150吊装设备140远离吊装口230的一侧包括:操作第一电动葫芦150按钮器上的另一按钮,使第一电动葫芦150的链条慢慢松弛,保持第二电动葫芦160、牵引手拉葫芦110和溜尾手拉葫芦130同时发力,确保设备140始终处于平衡状态,在第一电动葫芦150不受力情况下,摘除第一电动葫芦150并连接至设备140尾端两侧的吊装孔处。然后启动第一电动葫芦150的按钮器,与其他葫芦共同牵引设备140向前、向上缓慢移动。其中,第三距离为设备140长度减1米。
42.参考图8和图9,当设备140远离吊装口230的一侧移至距离吊装口230第四距离时,通过第二电动葫芦160和第三电动葫芦170吊装设备140靠近吊装口230的一侧,第一电动葫芦150吊装设备140远离吊装口230的一侧包括:继续牵引缓移设备140,使其缓慢进入吊装口230,待设备140尾端即将进入吊装口230时停止移动,使用第三电动葫芦170连接至第二电动葫芦160与设备140前端两侧相连的相同吊装孔处,操作第三电动葫芦170使其与其他葫芦同时受力,共同牵引设备140移动,在设备140跨入吊装口230过程中,溜尾手拉葫芦130需严格控制平移速度,防止设备140晃动;设备140在全部电动葫芦的作用下继续前移,待其尾端慢慢升起离开地坦克120表面时,移除设备140尾端下面的地坦克120,继续牵引缓移设备140,使其完全跨入吊装口230,此时设备140全部脱离地面处于悬空状态。其中,第四距离为设备140长度减去设备140移动距离,且小于等于0米。
43.参考图10,当设备140位于移至吊装口230上方时,第三电动葫芦170与设备140靠近吊装口230的一侧连接,第一电动葫芦150与设备140远离吊装口230的一侧连接,并通过第三电动葫芦170和第一电动葫芦150将设备140吊装至下层楼板上包括:设备140在空中受
力的情况下继续缓慢平移至各电动葫芦的正下方时停止,此时操作第二电动葫芦160按钮器上的另一按钮,使第二电动葫芦160的链条慢慢松弛,待其不发力时摘除第二电动葫芦160,确定设备140稳定后摘除溜尾手拉葫芦130和牵引手拉葫芦110,设备140在第一电动葫芦150和第三电动葫芦170的共同作用下降落至下层楼板的地坦克120上,此时即可摘除第一电动葫芦150和第三电动葫芦170。
44.参考图11,图11是本发明实施例中第一电动葫芦150、第二电动葫芦160和第三电动葫芦170设置在上层楼板240上的结构示意图,第一电动葫芦150、第二电动葫芦160和第三电动葫芦170通过吊点装置设置在上层楼板240上,所述吊点装置包括设置在上层楼板240上方的型钢180,设置在所述型钢180上方的钢棒190,开设在所述上层楼板240上的吊孔210,一端套设在钢棒190上,另一端穿过所述吊孔210至上层楼板240下方的钢丝绳套220,所述钢丝绳套220用于吊装第一电动葫芦150、第二电动葫芦160和第三电动葫芦170中的一个。优选的,所述钢棒190垂直于所述型钢180长度方向设置。所述型钢180优选为h250。优选的,所述吊点装置还包括设置在所述上层楼板240的上表面与型钢180之间的枕木,如此,避免型钢180破坏上层楼板240。其中,所述钢棒190的直径为60mm,所述钢丝绳套220的直径为32mm,吊孔210的直径为200mm。
45.参考图1和图2,所述吊装设备的方法还包括在通过牵引手拉葫芦110牵引设置在地坦克120上的设备140靠近吊装口230的一侧,通过溜尾手拉葫芦130牵引设备140远离吊装口230的一侧之前,通过吊车将设备140从运输车上起吊,并通过吊车将设备140吊装至地坦克120上。具体的,接到正式起吊命令后,吊车提升转臂,将设备140缓慢从环场道路越过施工围挡直接吊至露天平台,工人按照钢平台的位置指引设备140慢慢落在露天平台上放置的四个地坦克120(位置和距离根据设备140底座尺寸而定)上面。
46.上述描述仅是对本发明较佳实施例的描述,并非对本发明范围的任何限定,本发明领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求书的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1